Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Pieces of UMLDocument21 pagesPieces of UMLEeiouNo ratings yet
- ERD LectureDocument12 pagesERD LectureAlyssa ApuraNo ratings yet
- Gli Technical Specifications For Random Number Generator TestingDocument2 pagesGli Technical Specifications For Random Number Generator TestingBengabullNo ratings yet
- OoadDocument5 pagesOoadPrabhu DhandapaniNo ratings yet
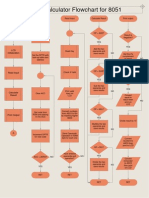
- Calculator Flowchart 8051Document1 pageCalculator Flowchart 8051Dwiky ErlanggaNo ratings yet
- SD-Access Deployment GuideDocument95 pagesSD-Access Deployment GuideAriNo ratings yet
- Report Writer and Struture ReportDocument4 pagesReport Writer and Struture ReportTaingren HutNo ratings yet
- NOMDocument18 pagesNOMJatin Gadhiya100% (1)
- Offsec Sample ReportDocument32 pagesOffsec Sample ReportiuppiterNo ratings yet
- Tutorial 04Document29 pagesTutorial 04Nehal PatodiNo ratings yet
- Soalan KomputerDocument10 pagesSoalan KomputerMarlina ShafieNo ratings yet
- Unit 1Document25 pagesUnit 1Vijai Kumarr GottipatiNo ratings yet
- Geographical Data Modeling: Longley Et Al., Ch. 8Document47 pagesGeographical Data Modeling: Longley Et Al., Ch. 8VictorJah Lion ContrerasNo ratings yet
- Data Protection: RAID: Section 1: Storage SystemDocument27 pagesData Protection: RAID: Section 1: Storage SystemGauravSwamiNo ratings yet
- Chapter 2Document3 pagesChapter 2Ali RidhaNo ratings yet
- Iis FundamentalsDocument18 pagesIis FundamentalsRiyas JacksparowNo ratings yet
- Fast Algorithm For DCTDocument20 pagesFast Algorithm For DCTsuhmudNo ratings yet
- AIF For Outbound InterfaceDocument7 pagesAIF For Outbound InterfaceDivya DivyNo ratings yet
- Image Pal Capturing DocumentDocument11 pagesImage Pal Capturing DocumentRajesh KhannaNo ratings yet
- FCUBS Database Practices Db11gr2 Fc12.0.1Document38 pagesFCUBS Database Practices Db11gr2 Fc12.0.1cuonglunNo ratings yet
- 8th Sem SyllabusDocument4 pages8th Sem SyllabusShwetank GoelNo ratings yet
- ABAP EventsDocument5 pagesABAP EventsRenukhaRangasamiNo ratings yet
- JFlexDocument48 pagesJFlexsakibatorNo ratings yet
- Lecture No. Postfix/Infix/Prefix Lecture Delivered by Zulfiqar AliDocument50 pagesLecture No. Postfix/Infix/Prefix Lecture Delivered by Zulfiqar Alirana856No ratings yet
- STLD - 1st ShauryaDocument19 pagesSTLD - 1st ShauryaMudit PandeyNo ratings yet
- WISDocument18 pagesWISKapil KumarNo ratings yet
- 2570 DirectAccessWSG ExternalDocument7 pages2570 DirectAccessWSG Externalarpand11No ratings yet
- IPFire Security Hardening (Wiki - Ipfire.org)Document11 pagesIPFire Security Hardening (Wiki - Ipfire.org)atlinkNo ratings yet
- HPDocument124 pagesHPlasryzaNo ratings yet
- Netbackup Test2Document6 pagesNetbackup Test2Rajesh YeletiNo ratings yet