Download as docx, pdf, or txt
You might also like
- Automotive Wiring Diagrams: Electrical SchematicsDocument5 pagesAutomotive Wiring Diagrams: Electrical SchematicsJeffrey Constantino PatacsilNo ratings yet
- Toyota High-Voltage BatteryDocument14 pagesToyota High-Voltage Batteryclcasal100% (1)
- How To Read Wiring DiagramDocument14 pagesHow To Read Wiring DiagramRomeo HinogNo ratings yet
- Automotive Electrical and Electronics EngineeringDocument11 pagesAutomotive Electrical and Electronics EngineeringsrajapratyNo ratings yet
- HV - P112 Hybrid Vehicle Control Part 1Document250 pagesHV - P112 Hybrid Vehicle Control Part 1carrasco_gomez100% (5)
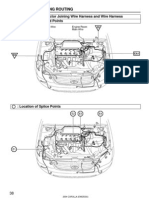
- 2004 Corolla Electrical Diagram - RoutingDocument9 pages2004 Corolla Electrical Diagram - RoutingNick Baptiste100% (2)
- FIAT Fault Codes 0338Document1 pageFIAT Fault Codes 0338josevarelarodriguez100% (1)
- Unimech PDFDocument2 pagesUnimech PDFSAMPATHUNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- Automotive Cable and Wiring SystemDocument20 pagesAutomotive Cable and Wiring SystemBala100% (1)
- Fundamentals of Hybrid Vehicle TechnologyDocument49 pagesFundamentals of Hybrid Vehicle TechnologyAnas Abandeh100% (1)
- Sensors in AutomobilesDocument18 pagesSensors in Automobilesapi-1998994992% (13)
- Mild Hybrid Electric Vehicle (MHEV) - Electrical ArchitectureDocument6 pagesMild Hybrid Electric Vehicle (MHEV) - Electrical ArchitectureRui MendesNo ratings yet
- Prius UtilDocument14 pagesPrius UtilManea Ionut Alexandru100% (3)
- Toyota Camry IgDocument56 pagesToyota Camry IgKulasekaran Amirthalingam100% (1)
- Toyota Electrical ConceptsDocument30 pagesToyota Electrical ConceptsNDD1959100% (3)
- Steering Angle Sensor E38 M57Document2 pagesSteering Angle Sensor E38 M57Michal PiratzNo ratings yet
- InternshipDocument45 pagesInternshipPrakashRaiNo ratings yet
- Automotive Computer Networks: Electrical/Electronics 3Document72 pagesAutomotive Computer Networks: Electrical/Electronics 3rcerny05No ratings yet
- Sensor Communication Auto MotivesDocument34 pagesSensor Communication Auto MotivesAkhil Sharma100% (2)
- Engine Control Module (Ecm) I/O SignalDocument5 pagesEngine Control Module (Ecm) I/O Signalkofo3000No ratings yet
- CAN BusDocument32 pagesCAN BusMohammed AsharNo ratings yet
- Vehicle Sensors WiringDocument8 pagesVehicle Sensors WiringAudrick Russell100% (1)
- Enginer PHEV User Manual Generation 1 PriusDocument14 pagesEnginer PHEV User Manual Generation 1 Priusmiksi7906No ratings yet
- Map Sensor Drivability SymptomsDocument15 pagesMap Sensor Drivability SymptomsmichaelsilvaNo ratings yet
- Hybrid EngineDocument22 pagesHybrid Engineyashwantmoganaradjou100% (1)
- Automotive SensorsDocument21 pagesAutomotive SensorsJinu Jayaraj100% (1)
- Wiring Headlight RelaysDocument20 pagesWiring Headlight RelaysFloris van EnterNo ratings yet
- Sensors Used in CarsDocument14 pagesSensors Used in Cars2031 Ayush KshirsagarNo ratings yet
- Map Sensor Diagnosis by Pierburg PDFDocument4 pagesMap Sensor Diagnosis by Pierburg PDFIonut-alexandru IordacheNo ratings yet
- Automotive Electrical & ElectronicsDocument50 pagesAutomotive Electrical & ElectronicsleninkishgmailcomNo ratings yet
- Automotive Wiring Diagram (5 Chapters - 11-July-2020) PDFDocument123 pagesAutomotive Wiring Diagram (5 Chapters - 11-July-2020) PDFpyae phyoeNo ratings yet
- CAN BUS Wire RepairDocument1 pageCAN BUS Wire RepairMMNo ratings yet
- Making Sense of Air Flow SensorsDocument10 pagesMaking Sense of Air Flow SensorsWilliam KibbeNo ratings yet
- BMW 6 E65-66 Air SuspensionsDocument17 pagesBMW 6 E65-66 Air SuspensionsSalisburNo ratings yet
- Vehicle Engine Management SystemDocument4 pagesVehicle Engine Management SystemfadholiNo ratings yet
- CAN (Control Area Network)Document18 pagesCAN (Control Area Network)Lee Răng HôNo ratings yet
- Automotive Training CourseDocument7 pagesAutomotive Training CourseNguyễn TúNo ratings yet
- 2010 Toyota Prius Package II Head Unit UpgradeDocument10 pages2010 Toyota Prius Package II Head Unit UpgradeMichael HaisleyNo ratings yet
- Group 5 Presentation: Hybrid CarDocument48 pagesGroup 5 Presentation: Hybrid CarRuzaini ZaiNo ratings yet
- AutoSpeed - Modifying Electric Power SteeringDocument6 pagesAutoSpeed - Modifying Electric Power SteeringgoundenaNo ratings yet
- 140 Predictive Battery Failure Analysis For The Prius HybridDocument8 pages140 Predictive Battery Failure Analysis For The Prius Hybridaerosubra100% (1)
- Boost Pressure Sensor (BPS)Document50 pagesBoost Pressure Sensor (BPS)Gian Fran0% (1)
- Lambda Sensors: Quick and Easy Testing and ReplacementDocument12 pagesLambda Sensors: Quick and Easy Testing and ReplacementChinh HuuNo ratings yet
- Automotive SensorsDocument29 pagesAutomotive SensorsLeoNo ratings yet
- Diagnosis From The Drivers SeatDocument101 pagesDiagnosis From The Drivers Seatabul hussain100% (1)
- Reading A Vacuum GaugeDocument4 pagesReading A Vacuum Gaugeschraeuble100% (1)
- Mitsubishi Obd Training 20061027Document47 pagesMitsubishi Obd Training 20061027shandpqd100% (3)
- Automotive Fuse PDFDocument355 pagesAutomotive Fuse PDFvenkatNo ratings yet
- L1 CV4 Web 2019 - (Blue-Book) PDFDocument36 pagesL1 CV4 Web 2019 - (Blue-Book) PDFRCesar Ag100% (1)
- Fuse Box E120Document3 pagesFuse Box E120Shahmeer AhmedNo ratings yet
- User Manual Abrites Commander For ToyotaDocument33 pagesUser Manual Abrites Commander For ToyotaMiguel VegaNo ratings yet
- PS - Power SteeringDocument58 pagesPS - Power SteeringKatu2010100% (2)
- 874 Engine Control Systems II Technician Handbook: Single Pump Secondary Air Injection SystemDocument9 pages874 Engine Control Systems II Technician Handbook: Single Pump Secondary Air Injection SystemPhan Tien VuongNo ratings yet
- Toyota Hybrid Camry Emergency Response GuideDocument31 pagesToyota Hybrid Camry Emergency Response GuideRobert ObremskiNo ratings yet
- Car SensorsDocument14 pagesCar Sensorsjohn ayengahNo ratings yet
- Hybrid Vehicles Electric Vehicles Fuel Cell Electric Vehicles Traction MotorsDocument13 pagesHybrid Vehicles Electric Vehicles Fuel Cell Electric Vehicles Traction Motorsddi11No ratings yet
- Kia CVVTDocument5 pagesKia CVVTFastcross HondaNo ratings yet
- ECU Designing and Testing Using National Instruments ProductsDocument7 pagesECU Designing and Testing Using National Instruments ProductsTYu4443No ratings yet
- 1743 LKWActrosXXXXXX 954frDocument4 pages1743 LKWActrosXXXXXX 954frgeothermal3102100% (1)
- Uniform Building CodeDocument5 pagesUniform Building Codegenas7265No ratings yet
- Cryogenic Freezing Technology: Yogesh Kumar, Soumitra Tiwari and Yashwant KumarDocument4 pagesCryogenic Freezing Technology: Yogesh Kumar, Soumitra Tiwari and Yashwant KumarAditya DiwediNo ratings yet
- En-CA-1008-1 PLP-TH Transmission Product CatalogueDocument99 pagesEn-CA-1008-1 PLP-TH Transmission Product CataloguealvinNo ratings yet
- Item # D5P2B, Nidec/Emerson/US Motors General Purpose Three Phase Open Dripproof (ODP) Premium Efficient MotorsDocument1 pageItem # D5P2B, Nidec/Emerson/US Motors General Purpose Three Phase Open Dripproof (ODP) Premium Efficient MotorsMario TapiaNo ratings yet
- Diesel Ignition TemperatureDocument2 pagesDiesel Ignition Temperaturewahaha06No ratings yet
- Hall Effect LabDocument8 pagesHall Effect LabTory JohansenNo ratings yet
- LEANDocument75 pagesLEANVaibhavNo ratings yet
- MMM Actregdreengrev2Document22 pagesMMM Actregdreengrev2alexmuchmure2158No ratings yet
- Didacta - Pilot Plant For Biogas and HydrogenDocument4 pagesDidacta - Pilot Plant For Biogas and HydrogenAntonNo ratings yet
- Blucem Hb55: Product Code Bc-20-00-000S R01/2017 Page 1 of 4Document4 pagesBlucem Hb55: Product Code Bc-20-00-000S R01/2017 Page 1 of 4Rajiv SingalNo ratings yet
- Aitt Feb 2017 TH Sem IDocument5 pagesAitt Feb 2017 TH Sem IMadhu KumarNo ratings yet
- 2 Intraplast-Z PDS GCC (01-2014) 1Document3 pages2 Intraplast-Z PDS GCC (01-2014) 1OMAR MUKTHAR JAMAL MOHAMEDNo ratings yet
- Roi CalculationDocument2 pagesRoi CalculationŠetkić SemirNo ratings yet
- Astm A 623 - 08 Tin Mill Products-General RequirementsDocument38 pagesAstm A 623 - 08 Tin Mill Products-General Requirementsjose_ruben_64No ratings yet
- Recent Trends in Chemistry and Nano TechnologyDocument6 pagesRecent Trends in Chemistry and Nano TechnologyMeera SeshannaNo ratings yet
- Overview of Pipeline Coatings)Document7 pagesOverview of Pipeline Coatings)kartalsamNo ratings yet
- Manual Pompa Peristaltica Verderflex Dura 05 - 35 enDocument28 pagesManual Pompa Peristaltica Verderflex Dura 05 - 35 enlucianchiritaNo ratings yet
- HeatersDocument684 pagesHeatersdgomez686100% (1)
- Packaging FGFDocument34 pagesPackaging FGFAditi Chakraborty0% (1)
- Service: ManualDocument54 pagesService: ManualElseven AkifNo ratings yet
- The Application of Fibre Reinforced Shotcrete As Primary Support For A Tunnel in FlyschDocument8 pagesThe Application of Fibre Reinforced Shotcrete As Primary Support For A Tunnel in FlyschCristopher HernándezNo ratings yet
- TK 51916-18-OP Direct Drive DSR Operators Manual Rev 12 06-16 - ML PDFDocument334 pagesTK 51916-18-OP Direct Drive DSR Operators Manual Rev 12 06-16 - ML PDFRaphael GamaNo ratings yet
- Trident Top Hammer Drill BitsDocument12 pagesTrident Top Hammer Drill BitsLGT LLCNo ratings yet
- Treatment of Chlorophenols From Wastewaters by Advanced Oxidation ProcessesDocument34 pagesTreatment of Chlorophenols From Wastewaters by Advanced Oxidation Processesvijay kumarNo ratings yet
- Iron & Manganese RemovalDocument47 pagesIron & Manganese RemovalJulio LoredoNo ratings yet
- TBG 210 ME 50Hz: Technical and Functional FeaturesDocument2 pagesTBG 210 ME 50Hz: Technical and Functional FeaturesVoicu StaneseNo ratings yet
- Chem Sem 1 Percubaan SMK Pusat Bandar PuchongDocument12 pagesChem Sem 1 Percubaan SMK Pusat Bandar Puchongevacuate clashNo ratings yet
- ChemicalDocument2 pagesChemicalTopuls ItigiNo ratings yet