
ATU 500 Owner Manual
ATU 500 Owner Manual
You might also like
- The Mixing Process PVCDocument4 pagesThe Mixing Process PVCb1gm3n86% (7)
- Sb220 Compendium Va7jw Rev2Document40 pagesSb220 Compendium Va7jw Rev2FrankNo ratings yet
- CSR-CSFT438 Product Description and User's Manual Rev F 20-JUNE-2011Document62 pagesCSR-CSFT438 Product Description and User's Manual Rev F 20-JUNE-2011معاذ أحمدNo ratings yet
- Drilling and Blasting of Rocks - CARLCIS LOPEZ JIMENODocument399 pagesDrilling and Blasting of Rocks - CARLCIS LOPEZ JIMENOKevin Adani100% (2)
- Item No. QTY Part No. Description VendorDocument11 pagesItem No. QTY Part No. Description Vendorgapjg0% (1)
- Costruzioni Elettroniche: Mod. KL 800 Linear AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KL 800 Linear AmplifierPisu Miau Pisu MiauNo ratings yet
- Smart Com 150 Manual English V5 - 14 PDFDocument121 pagesSmart Com 150 Manual English V5 - 14 PDFRafaelNo ratings yet
- NDB Spares Kit Se125Document1 pageNDB Spares Kit Se125chienNo ratings yet
- Uhf Satcom Antenna 240 To 320 MHZDocument2 pagesUhf Satcom Antenna 240 To 320 MHZechelon_id388No ratings yet
- Elmex-Terminal Block CatalogDocument144 pagesElmex-Terminal Block CatalogHansen LaMessiah SaputraNo ratings yet
- AKD Target HF3 Low ResDocument9 pagesAKD Target HF3 Low ReshmtuanbkNo ratings yet
- Bang Gia Thiet Bi Dien Mitsubishi 01-04-2020Document422 pagesBang Gia Thiet Bi Dien Mitsubishi 01-04-2020Kien Nguyen TrungNo ratings yet
- TS-870 Service Manual (OCR)Document157 pagesTS-870 Service Manual (OCR)yu7aw100% (1)
- Catalog Naval AntenasDocument29 pagesCatalog Naval Antenasberny_111_455552163No ratings yet
- MFJ 969 Atu Test by Zs1jhgDocument1 pageMFJ 969 Atu Test by Zs1jhgJohn GreenNo ratings yet
- SIRIO List ProductDocument19 pagesSIRIO List Productrafif.rifaNo ratings yet
- L45466 B18 C76 en PDFDocument2 pagesL45466 B18 C76 en PDFpeizanu100% (1)
- Henry 4K-2 RF Linear AmplifierDocument35 pagesHenry 4K-2 RF Linear Amplifierw9fe100% (1)
- Ardf-Reciever Fox-801 (Dl4cu) - enDocument7 pagesArdf-Reciever Fox-801 (Dl4cu) - enag1tatorNo ratings yet
- Mirage b2530g ManualDocument5 pagesMirage b2530g ManualWilliam C. AdamsNo ratings yet
- TX RX Sequencerv2Document9 pagesTX RX Sequencerv2Zulu Bravo MikeNo ratings yet
- Manual PA150Document18 pagesManual PA150ricardoNo ratings yet
- Hy-Gain 2010 CatalogDocument9 pagesHy-Gain 2010 CatalogkelpiusNo ratings yet
- Diamond - EnglishDocument24 pagesDiamond - EnglishTopcom Toki-VokiNo ratings yet
- Series Ns - STR 22seDocument28 pagesSeries Ns - STR 22seAlexandre MorenoNo ratings yet
- General Wiring Cables BSS-2004.: Single Conductor Cables/CoilDocument1 pageGeneral Wiring Cables BSS-2004.: Single Conductor Cables/Coilabdul hafeezNo ratings yet
- Manual President Barry ASC FM ENGDocument20 pagesManual President Barry ASC FM ENGIordan Adrian100% (1)
- Det 375Document10 pagesDet 375nicesreekanthNo ratings yet
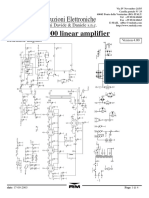
- Mod. KLV 400 Linear Amplifier Costruzioni Elettroniche: Di Marchioni Davide & Daniele S.N.C. Schematic DiagramDocument3 pagesMod. KLV 400 Linear Amplifier Costruzioni Elettroniche: Di Marchioni Davide & Daniele S.N.C. Schematic DiagramPisu Miau Pisu MiauNo ratings yet
- Test Report Uniden Bearcat 980 ENGDocument86 pagesTest Report Uniden Bearcat 980 ENGStephanie Hall100% (1)
- M31e e ManualDocument23 pagesM31e e ManualВалсаNo ratings yet
- N7DDC ATU 100 Mini and Extended Boards MasterDocument9 pagesN7DDC ATU 100 Mini and Extended Boards MasterIoannis PerperisNo ratings yet
- Amateur TV Transmitter PDFDocument11 pagesAmateur TV Transmitter PDFHector Fiordaliso100% (1)
- MFJ 299 ModifiedDocument4 pagesMFJ 299 ModifiedJackson VerissimoNo ratings yet
- Bi006008 00 02 - Body PDFDocument922 pagesBi006008 00 02 - Body PDFRamon HidalgoNo ratings yet
- Costruzioni Elettroniche: Mod. KLV 1000 Linear AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KLV 1000 Linear AmplifierPisu Miau Pisu Miau100% (2)
- Icom IC-M802 Service ManualDocument79 pagesIcom IC-M802 Service ManualYayok S. AnggoroNo ratings yet
- Instruction Manual: VHF Marine TransceiverDocument68 pagesInstruction Manual: VHF Marine TransceiverMarvinNo ratings yet
- Adapting The Astatic d104 MicDocument3 pagesAdapting The Astatic d104 MicFred Bohn100% (1)
- Dual Band Transceiver: S-15120XZ-C1 March 2015Document55 pagesDual Band Transceiver: S-15120XZ-C1 March 2015wahyunugieNo ratings yet
- DRMASSDocument17 pagesDRMASSTharakaKaushalya0% (1)
- Super Star 3900-Eft Modify Frequency Range - Radioaficion Ham RadioDocument6 pagesSuper Star 3900-Eft Modify Frequency Range - Radioaficion Ham RadioPedro VegaNo ratings yet
- Yaesu FTM-3200DR Digital/ Analog 2-Meter Transceiver: An Inexpensive Addition To Yaesu's Lineup of System Fusion RadiosDocument3 pagesYaesu FTM-3200DR Digital/ Analog 2-Meter Transceiver: An Inexpensive Addition To Yaesu's Lineup of System Fusion RadiosJohn GillNo ratings yet
- m600wbgb b0425 PDFDocument406 pagesm600wbgb b0425 PDFFabioNo ratings yet
- 3600xxx SSB MosfetDocument13 pages3600xxx SSB Mosfetbill1068No ratings yet
- DG2IAQ Modification Sheet President LincolnDocument11 pagesDG2IAQ Modification Sheet President LincolnSalvador Lopez BoschNo ratings yet
- Build A 9dB, 70cm Collinear AntennaDocument2 pagesBuild A 9dB, 70cm Collinear AntennaStephen Dunifer100% (1)
- Catalogo de AntenasDocument44 pagesCatalogo de AntenasEmanuel Gonzalez Malla100% (1)
- This Information Is Provided byDocument3 pagesThis Information Is Provided bySanyel SaitoNo ratings yet
- RA60H1317M RF Power MOSFET Amplifier Module DatasheetDocument9 pagesRA60H1317M RF Power MOSFET Amplifier Module DatasheetAbbas MaghazehiNo ratings yet
- A Homebrew Yagi For 1296 MHZ DX: by Heinrich F. Reckemeyer, Dj9Yw - Dj9Yw@T-Online - deDocument5 pagesA Homebrew Yagi For 1296 MHZ DX: by Heinrich F. Reckemeyer, Dj9Yw - Dj9Yw@T-Online - dejorgejbaNo ratings yet
- VX-170 Service MenuDocument3 pagesVX-170 Service Menuphoto38911100% (1)
- MA-500TR: Instruction ManualDocument60 pagesMA-500TR: Instruction Manualtomi marconiNo ratings yet
- 144MHz Power Amplifier CircuitDocument2 pages144MHz Power Amplifier CircuitfaneiNo ratings yet
- Anytone At-5189 ManualDocument38 pagesAnytone At-5189 Manual9w2nrNo ratings yet
- Yaesu FT-726R Operating ManualDocument45 pagesYaesu FT-726R Operating ManualYayok S. AnggoroNo ratings yet
- Antenna Tuning Unit AC500 TS5.210: HF-SSB Automatic Antenna TunerDocument24 pagesAntenna Tuning Unit AC500 TS5.210: HF-SSB Automatic Antenna TunerJadi PurwonoNo ratings yet
- At 120Document19 pagesAt 120khcheungNo ratings yet
- Transient Voltage Surge Suppression PDFDocument7 pagesTransient Voltage Surge Suppression PDFwafikmh4No ratings yet
- JVC Av-N29304 Av-N29430 Chassis Fe2Document57 pagesJVC Av-N29304 Av-N29430 Chassis Fe2Milo65No ratings yet
- JVC HX-Z9 Manual de ServicioDocument66 pagesJVC HX-Z9 Manual de ServicioJosé BenavidesNo ratings yet
- Av 29fh1sug JVC, 100hzDocument48 pagesAv 29fh1sug JVC, 100hzQ-EntityNo ratings yet
- Quantstudio 5 Real-Time PCR System For Human IdentificationDocument2 pagesQuantstudio 5 Real-Time PCR System For Human IdentificationNiraj SilwalNo ratings yet
- Cat - Dcs.sis - Controller (12H - 8MN)Document2 pagesCat - Dcs.sis - Controller (12H - 8MN)Warley Moraes Oliveira100% (1)
- IMS Abend CodesDocument23 pagesIMS Abend Codesparvathy88No ratings yet
- iCE40UltraFamilyDataSheet PDFDocument42 pagesiCE40UltraFamilyDataSheet PDFson_gotenNo ratings yet
- Conceptual FrameworkDocument20 pagesConceptual FrameworkWZ HakimNo ratings yet
- BARC India Guidelines For Single Event Reporting (Amended) - August 2018Document21 pagesBARC India Guidelines For Single Event Reporting (Amended) - August 2018Harsh2588No ratings yet
- 33KV, 1250a, 26.3ka (3 Sec) Pix-36 Cico Panel SWBD#20211101 - 100747# - 102943Document49 pages33KV, 1250a, 26.3ka (3 Sec) Pix-36 Cico Panel SWBD#20211101 - 100747# - 102943Ashok Patel100% (1)
- Design Change Request (DCR) : PT - Barata IndonesiaDocument1 pageDesign Change Request (DCR) : PT - Barata IndonesiaRhadityo Shakti BudimanNo ratings yet
- Autoflame Sensors Guide: Combustion Management SystemsDocument41 pagesAutoflame Sensors Guide: Combustion Management SystemsFAROUKNo ratings yet
- EKKO ProjectDocument2 pagesEKKO ProjectGeofisica GusZavNo ratings yet
- LG 32lh35fd AaDocument66 pagesLG 32lh35fd AaJúlio CésarNo ratings yet
- Assignent 4Document2 pagesAssignent 4Beshir Heyru Mohammed100% (1)
- Grade 7 10 Edukasyon Sa PagpapakataoDocument17 pagesGrade 7 10 Edukasyon Sa PagpapakataoMarinel CanicoNo ratings yet
- Advances in The Theory of Plates and Shells, Edited by G.Z. Voyiadjis and D. KaramanlidisDocument35 pagesAdvances in The Theory of Plates and Shells, Edited by G.Z. Voyiadjis and D. KaramanlidisHasanain AlmusawiNo ratings yet
- MicrosoftDocument20 pagesMicrosoftSagar PatelNo ratings yet
- Q02-Chem - 1023 - Final - ExamDocument5 pagesQ02-Chem - 1023 - Final - ExamRodríguez Rito AméricaNo ratings yet
- The Nicoll Highway Collapse PDF FreeDocument140 pagesThe Nicoll Highway Collapse PDF FreeJohn WongNo ratings yet
- Document of Galois Counter ModeDocument16 pagesDocument of Galois Counter Modesantosh chNo ratings yet
- 3rd Round Wise GATE Cut Off of All Round AY 2024-25 v555 - Copy (1) (1) - RemovedDocument2 pages3rd Round Wise GATE Cut Off of All Round AY 2024-25 v555 - Copy (1) (1) - RemovedAgony SinghNo ratings yet
- Smart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedDocument7 pagesSmart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedfajarvicNo ratings yet
- Childhood TraumaDocument4 pagesChildhood TraumaMarvellous MunhuwaNo ratings yet
- Gen Ed Prof Ed Answer Key For Self StudyDocument82 pagesGen Ed Prof Ed Answer Key For Self StudyAilene ReyesNo ratings yet
- Week 3Document2 pagesWeek 3Jasmine Morante AntonioNo ratings yet
- Seca717,757 - Service ManualDocument17 pagesSeca717,757 - Service ManualSergio PérezNo ratings yet
- CC4001 - CD ChangerDocument2 pagesCC4001 - CD ChangerbradsystemsNo ratings yet
- UAS General English-2-2021Document12 pagesUAS General English-2-2021Putri Pradnya DewantiNo ratings yet
- TESOL Journal - 2022 - Uludag - Exploring EAP Instructors Evaluation of Classroom Based Integrated EssaysDocument20 pagesTESOL Journal - 2022 - Uludag - Exploring EAP Instructors Evaluation of Classroom Based Integrated EssaysAy IsNo ratings yet
- Practicum Narrative Report FormatDocument8 pagesPracticum Narrative Report FormatJC GAMINGNo ratings yet





















































































Download as pdf or txt
You might also like
- The Mixing Process PVCDocument4 pagesThe Mixing Process PVCb1gm3n86% (7)
- Sb220 Compendium Va7jw Rev2Document40 pagesSb220 Compendium Va7jw Rev2FrankNo ratings yet
- CSR-CSFT438 Product Description and User's Manual Rev F 20-JUNE-2011Document62 pagesCSR-CSFT438 Product Description and User's Manual Rev F 20-JUNE-2011معاذ أحمدNo ratings yet
- Drilling and Blasting of Rocks - CARLCIS LOPEZ JIMENODocument399 pagesDrilling and Blasting of Rocks - CARLCIS LOPEZ JIMENOKevin Adani100% (2)
- Item No. QTY Part No. Description VendorDocument11 pagesItem No. QTY Part No. Description Vendorgapjg0% (1)
- Costruzioni Elettroniche: Mod. KL 800 Linear AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KL 800 Linear AmplifierPisu Miau Pisu MiauNo ratings yet
- Smart Com 150 Manual English V5 - 14 PDFDocument121 pagesSmart Com 150 Manual English V5 - 14 PDFRafaelNo ratings yet
- NDB Spares Kit Se125Document1 pageNDB Spares Kit Se125chienNo ratings yet
- Uhf Satcom Antenna 240 To 320 MHZDocument2 pagesUhf Satcom Antenna 240 To 320 MHZechelon_id388No ratings yet
- Elmex-Terminal Block CatalogDocument144 pagesElmex-Terminal Block CatalogHansen LaMessiah SaputraNo ratings yet
- AKD Target HF3 Low ResDocument9 pagesAKD Target HF3 Low ReshmtuanbkNo ratings yet
- Bang Gia Thiet Bi Dien Mitsubishi 01-04-2020Document422 pagesBang Gia Thiet Bi Dien Mitsubishi 01-04-2020Kien Nguyen TrungNo ratings yet
- TS-870 Service Manual (OCR)Document157 pagesTS-870 Service Manual (OCR)yu7aw100% (1)
- Catalog Naval AntenasDocument29 pagesCatalog Naval Antenasberny_111_455552163No ratings yet
- MFJ 969 Atu Test by Zs1jhgDocument1 pageMFJ 969 Atu Test by Zs1jhgJohn GreenNo ratings yet
- SIRIO List ProductDocument19 pagesSIRIO List Productrafif.rifaNo ratings yet
- L45466 B18 C76 en PDFDocument2 pagesL45466 B18 C76 en PDFpeizanu100% (1)
- Henry 4K-2 RF Linear AmplifierDocument35 pagesHenry 4K-2 RF Linear Amplifierw9fe100% (1)
- Ardf-Reciever Fox-801 (Dl4cu) - enDocument7 pagesArdf-Reciever Fox-801 (Dl4cu) - enag1tatorNo ratings yet
- Mirage b2530g ManualDocument5 pagesMirage b2530g ManualWilliam C. AdamsNo ratings yet
- TX RX Sequencerv2Document9 pagesTX RX Sequencerv2Zulu Bravo MikeNo ratings yet
- Manual PA150Document18 pagesManual PA150ricardoNo ratings yet
- Hy-Gain 2010 CatalogDocument9 pagesHy-Gain 2010 CatalogkelpiusNo ratings yet
- Diamond - EnglishDocument24 pagesDiamond - EnglishTopcom Toki-VokiNo ratings yet
- Series Ns - STR 22seDocument28 pagesSeries Ns - STR 22seAlexandre MorenoNo ratings yet
- General Wiring Cables BSS-2004.: Single Conductor Cables/CoilDocument1 pageGeneral Wiring Cables BSS-2004.: Single Conductor Cables/Coilabdul hafeezNo ratings yet
- Manual President Barry ASC FM ENGDocument20 pagesManual President Barry ASC FM ENGIordan Adrian100% (1)
- Det 375Document10 pagesDet 375nicesreekanthNo ratings yet
- Mod. KLV 400 Linear Amplifier Costruzioni Elettroniche: Di Marchioni Davide & Daniele S.N.C. Schematic DiagramDocument3 pagesMod. KLV 400 Linear Amplifier Costruzioni Elettroniche: Di Marchioni Davide & Daniele S.N.C. Schematic DiagramPisu Miau Pisu MiauNo ratings yet
- Test Report Uniden Bearcat 980 ENGDocument86 pagesTest Report Uniden Bearcat 980 ENGStephanie Hall100% (1)
- M31e e ManualDocument23 pagesM31e e ManualВалсаNo ratings yet
- N7DDC ATU 100 Mini and Extended Boards MasterDocument9 pagesN7DDC ATU 100 Mini and Extended Boards MasterIoannis PerperisNo ratings yet
- Amateur TV Transmitter PDFDocument11 pagesAmateur TV Transmitter PDFHector Fiordaliso100% (1)
- MFJ 299 ModifiedDocument4 pagesMFJ 299 ModifiedJackson VerissimoNo ratings yet
- Bi006008 00 02 - Body PDFDocument922 pagesBi006008 00 02 - Body PDFRamon HidalgoNo ratings yet
- Costruzioni Elettroniche: Mod. KLV 1000 Linear AmplifierDocument4 pagesCostruzioni Elettroniche: Mod. KLV 1000 Linear AmplifierPisu Miau Pisu Miau100% (2)
- Icom IC-M802 Service ManualDocument79 pagesIcom IC-M802 Service ManualYayok S. AnggoroNo ratings yet
- Instruction Manual: VHF Marine TransceiverDocument68 pagesInstruction Manual: VHF Marine TransceiverMarvinNo ratings yet
- Adapting The Astatic d104 MicDocument3 pagesAdapting The Astatic d104 MicFred Bohn100% (1)
- Dual Band Transceiver: S-15120XZ-C1 March 2015Document55 pagesDual Band Transceiver: S-15120XZ-C1 March 2015wahyunugieNo ratings yet
- DRMASSDocument17 pagesDRMASSTharakaKaushalya0% (1)
- Super Star 3900-Eft Modify Frequency Range - Radioaficion Ham RadioDocument6 pagesSuper Star 3900-Eft Modify Frequency Range - Radioaficion Ham RadioPedro VegaNo ratings yet
- Yaesu FTM-3200DR Digital/ Analog 2-Meter Transceiver: An Inexpensive Addition To Yaesu's Lineup of System Fusion RadiosDocument3 pagesYaesu FTM-3200DR Digital/ Analog 2-Meter Transceiver: An Inexpensive Addition To Yaesu's Lineup of System Fusion RadiosJohn GillNo ratings yet
- m600wbgb b0425 PDFDocument406 pagesm600wbgb b0425 PDFFabioNo ratings yet
- 3600xxx SSB MosfetDocument13 pages3600xxx SSB Mosfetbill1068No ratings yet
- DG2IAQ Modification Sheet President LincolnDocument11 pagesDG2IAQ Modification Sheet President LincolnSalvador Lopez BoschNo ratings yet
- Build A 9dB, 70cm Collinear AntennaDocument2 pagesBuild A 9dB, 70cm Collinear AntennaStephen Dunifer100% (1)
- Catalogo de AntenasDocument44 pagesCatalogo de AntenasEmanuel Gonzalez Malla100% (1)
- This Information Is Provided byDocument3 pagesThis Information Is Provided bySanyel SaitoNo ratings yet
- RA60H1317M RF Power MOSFET Amplifier Module DatasheetDocument9 pagesRA60H1317M RF Power MOSFET Amplifier Module DatasheetAbbas MaghazehiNo ratings yet
- A Homebrew Yagi For 1296 MHZ DX: by Heinrich F. Reckemeyer, Dj9Yw - Dj9Yw@T-Online - deDocument5 pagesA Homebrew Yagi For 1296 MHZ DX: by Heinrich F. Reckemeyer, Dj9Yw - Dj9Yw@T-Online - dejorgejbaNo ratings yet
- VX-170 Service MenuDocument3 pagesVX-170 Service Menuphoto38911100% (1)
- MA-500TR: Instruction ManualDocument60 pagesMA-500TR: Instruction Manualtomi marconiNo ratings yet
- 144MHz Power Amplifier CircuitDocument2 pages144MHz Power Amplifier CircuitfaneiNo ratings yet
- Anytone At-5189 ManualDocument38 pagesAnytone At-5189 Manual9w2nrNo ratings yet
- Yaesu FT-726R Operating ManualDocument45 pagesYaesu FT-726R Operating ManualYayok S. AnggoroNo ratings yet
- Antenna Tuning Unit AC500 TS5.210: HF-SSB Automatic Antenna TunerDocument24 pagesAntenna Tuning Unit AC500 TS5.210: HF-SSB Automatic Antenna TunerJadi PurwonoNo ratings yet
- At 120Document19 pagesAt 120khcheungNo ratings yet
- Transient Voltage Surge Suppression PDFDocument7 pagesTransient Voltage Surge Suppression PDFwafikmh4No ratings yet
- JVC Av-N29304 Av-N29430 Chassis Fe2Document57 pagesJVC Av-N29304 Av-N29430 Chassis Fe2Milo65No ratings yet
- JVC HX-Z9 Manual de ServicioDocument66 pagesJVC HX-Z9 Manual de ServicioJosé BenavidesNo ratings yet
- Av 29fh1sug JVC, 100hzDocument48 pagesAv 29fh1sug JVC, 100hzQ-EntityNo ratings yet
- Quantstudio 5 Real-Time PCR System For Human IdentificationDocument2 pagesQuantstudio 5 Real-Time PCR System For Human IdentificationNiraj SilwalNo ratings yet
- Cat - Dcs.sis - Controller (12H - 8MN)Document2 pagesCat - Dcs.sis - Controller (12H - 8MN)Warley Moraes Oliveira100% (1)
- IMS Abend CodesDocument23 pagesIMS Abend Codesparvathy88No ratings yet
- iCE40UltraFamilyDataSheet PDFDocument42 pagesiCE40UltraFamilyDataSheet PDFson_gotenNo ratings yet
- Conceptual FrameworkDocument20 pagesConceptual FrameworkWZ HakimNo ratings yet
- BARC India Guidelines For Single Event Reporting (Amended) - August 2018Document21 pagesBARC India Guidelines For Single Event Reporting (Amended) - August 2018Harsh2588No ratings yet
- 33KV, 1250a, 26.3ka (3 Sec) Pix-36 Cico Panel SWBD#20211101 - 100747# - 102943Document49 pages33KV, 1250a, 26.3ka (3 Sec) Pix-36 Cico Panel SWBD#20211101 - 100747# - 102943Ashok Patel100% (1)
- Design Change Request (DCR) : PT - Barata IndonesiaDocument1 pageDesign Change Request (DCR) : PT - Barata IndonesiaRhadityo Shakti BudimanNo ratings yet
- Autoflame Sensors Guide: Combustion Management SystemsDocument41 pagesAutoflame Sensors Guide: Combustion Management SystemsFAROUKNo ratings yet
- EKKO ProjectDocument2 pagesEKKO ProjectGeofisica GusZavNo ratings yet
- LG 32lh35fd AaDocument66 pagesLG 32lh35fd AaJúlio CésarNo ratings yet
- Assignent 4Document2 pagesAssignent 4Beshir Heyru Mohammed100% (1)
- Grade 7 10 Edukasyon Sa PagpapakataoDocument17 pagesGrade 7 10 Edukasyon Sa PagpapakataoMarinel CanicoNo ratings yet
- Advances in The Theory of Plates and Shells, Edited by G.Z. Voyiadjis and D. KaramanlidisDocument35 pagesAdvances in The Theory of Plates and Shells, Edited by G.Z. Voyiadjis and D. KaramanlidisHasanain AlmusawiNo ratings yet
- MicrosoftDocument20 pagesMicrosoftSagar PatelNo ratings yet
- Q02-Chem - 1023 - Final - ExamDocument5 pagesQ02-Chem - 1023 - Final - ExamRodríguez Rito AméricaNo ratings yet
- The Nicoll Highway Collapse PDF FreeDocument140 pagesThe Nicoll Highway Collapse PDF FreeJohn WongNo ratings yet
- Document of Galois Counter ModeDocument16 pagesDocument of Galois Counter Modesantosh chNo ratings yet
- 3rd Round Wise GATE Cut Off of All Round AY 2024-25 v555 - Copy (1) (1) - RemovedDocument2 pages3rd Round Wise GATE Cut Off of All Round AY 2024-25 v555 - Copy (1) (1) - RemovedAgony SinghNo ratings yet
- Smart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedDocument7 pagesSmart Growing Rod For Early-Onset Scoliosis: Osama Abolaeha, Huthaifa Al - Issa, and Ali ZayedfajarvicNo ratings yet
- Childhood TraumaDocument4 pagesChildhood TraumaMarvellous MunhuwaNo ratings yet
- Gen Ed Prof Ed Answer Key For Self StudyDocument82 pagesGen Ed Prof Ed Answer Key For Self StudyAilene ReyesNo ratings yet
- Week 3Document2 pagesWeek 3Jasmine Morante AntonioNo ratings yet
- Seca717,757 - Service ManualDocument17 pagesSeca717,757 - Service ManualSergio PérezNo ratings yet
- CC4001 - CD ChangerDocument2 pagesCC4001 - CD ChangerbradsystemsNo ratings yet
- UAS General English-2-2021Document12 pagesUAS General English-2-2021Putri Pradnya DewantiNo ratings yet
- TESOL Journal - 2022 - Uludag - Exploring EAP Instructors Evaluation of Classroom Based Integrated EssaysDocument20 pagesTESOL Journal - 2022 - Uludag - Exploring EAP Instructors Evaluation of Classroom Based Integrated EssaysAy IsNo ratings yet
- Practicum Narrative Report FormatDocument8 pagesPracticum Narrative Report FormatJC GAMINGNo ratings yet