Download as pdf or txt
You might also like
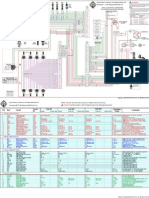
- Diagrama VT365-2004 PDFDocument2 pagesDiagrama VT365-2004 PDFHilario Gayosso Cruz100% (14)
- Decoding PS2 Wired and Wireless Controller For Interfacing With PIC Micro ControllerDocument17 pagesDecoding PS2 Wired and Wireless Controller For Interfacing With PIC Micro ControllerCk Kok100% (4)
- Sony Acx705akm Color LCDDocument20 pagesSony Acx705akm Color LCDHari NurcahyadiNo ratings yet
- KyoPal X7083-X7043-X7023Document70 pagesKyoPal X7083-X7043-X7023kristechnikNo ratings yet
- Examples: I2C Mode Serial Mode PWM ModeDocument6 pagesExamples: I2C Mode Serial Mode PWM ModeVictor JoseNo ratings yet
- Prius CodesDocument2 pagesPrius Codeskde148100% (1)
- CMPS14 - Documentation: 3.3v-5v Sda/Tx SCL/RX Mode Factory Use 0v GroundDocument7 pagesCMPS14 - Documentation: 3.3v-5v Sda/Tx SCL/RX Mode Factory Use 0v GroundRidhoNo ratings yet
- ATV12 Communication Parameters BBV51917 1.4IE05bDocument12 pagesATV12 Communication Parameters BBV51917 1.4IE05bRicardo Rodriguez ParedesNo ratings yet
- Data SheetDocument18 pagesData SheetJonas AldaoNo ratings yet
- AEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFDocument8 pagesAEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFNguyen Quang VinhNo ratings yet
- Evotouch ProtocolDocument10 pagesEvotouch ProtocolRoger SchobbenNo ratings yet
- CPU-Z HTML Report FileDocument28 pagesCPU-Z HTML Report FilephanipriyankNo ratings yet
- Gy-25 Tilt Module Manual V1.0 PinoutDocument3 pagesGy-25 Tilt Module Manual V1.0 Pinoutinersia mailNo ratings yet
- S7-200 Quick Reference Information: Special Memory BitsDocument6 pagesS7-200 Quick Reference Information: Special Memory BitspremchandarNo ratings yet
- CreatorDocument17 pagesCreatorRamon YuliansyahNo ratings yet
- Cmps 09Document5 pagesCmps 09Luis Felipe Hernández ZambranoNo ratings yet
- ¡ Semiconductor: General DescriptionDocument17 pages¡ Semiconductor: General DescriptionNguyễn Thành LinhNo ratings yet
- Cable of Data Communication 181Document12 pagesCable of Data Communication 181hungNo ratings yet
- AN708 Series Intelligent Temperature Controller/ Adjustor User's ManualDocument8 pagesAN708 Series Intelligent Temperature Controller/ Adjustor User's ManualChaker Abdellatif100% (1)
- HSR Serial CommunicationDocument10 pagesHSR Serial CommunicationLe Dinh PhongNo ratings yet
- 74ls193-Contador Binario de 4 BitsDocument8 pages74ls193-Contador Binario de 4 BitsEspartano HernándezNo ratings yet
- GRT 12 SmartSliceDocument7 pagesGRT 12 SmartSliceChristopherNo ratings yet
- HWMonitorDocument29 pagesHWMonitoragustinNo ratings yet
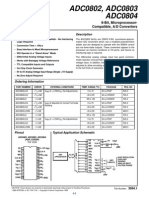
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocument17 pagesADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesJorge Luis Castillo GuarachiNo ratings yet
- ADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesDocument18 pagesADC0803, ADC0804: 8-Bit, Microprocessor-Compatible, A/D Converters FeaturesMarco MenezesNo ratings yet
- S7-200 Quick Reference Information: Special Memory BitsDocument6 pagesS7-200 Quick Reference Information: Special Memory BitsDjNIAZINo ratings yet
- Galil Cds3310 CatalogDocument5 pagesGalil Cds3310 CatalogElectromateNo ratings yet
- Vision™ OPLC™: V350-35-RA22/V350-J-RA22 Technical SpecificationsDocument7 pagesVision™ OPLC™: V350-35-RA22/V350-J-RA22 Technical SpecificationsAdélio MirandaNo ratings yet
- HCTL 2017Document12 pagesHCTL 2017ivancho1070No ratings yet
- DM74LS193 Synchronous 4-Bit Binary Counter With Dual Clock: General DescriptionDocument7 pagesDM74LS193 Synchronous 4-Bit Binary Counter With Dual Clock: General DescriptionsabarithasNo ratings yet
- Cmps 12Document8 pagesCmps 12fikry mulyadiNo ratings yet
- Frequency TwoMode UARTDocument18 pagesFrequency TwoMode UARTdani385arNo ratings yet
- Tda 7339Document12 pagesTda 7339Giovanni Carrillo VillegasNo ratings yet
- Tda 7313Document15 pagesTda 7313jordachadiNo ratings yet
- Mic 5891Document7 pagesMic 5891Arun Chary100% (1)
- DELL Inspiron N4020Document88 pagesDELL Inspiron N4020Deddy SuyantoNo ratings yet
- Ce 2766Document19 pagesCe 2766Alexe VictorNo ratings yet
- 74F676 16-Bit Serial/Parallel-In, Serial-Out Shift Register: General Description FeaturesDocument6 pages74F676 16-Bit Serial/Parallel-In, Serial-Out Shift Register: General Description Featuresmail2cibyNo ratings yet
- PDR ProtocolDocument5 pagesPDR Protocolnmexs666No ratings yet
- Uav 6Document22 pagesUav 6SatishReddyNo ratings yet
- ADC0802, ADC0803 ADC0804: Features DescriptionDocument17 pagesADC0802, ADC0803 ADC0804: Features DescriptionSuryananda PadmadinataNo ratings yet
- Timers of ATmega328PDocument26 pagesTimers of ATmega328PZaryab Khalil SiddiqueNo ratings yet
- I 3 CDocument3 pagesI 3 CKiran AlladaNo ratings yet
- Ns16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosDocument24 pagesNs16C552, Pc16552D: Pc16552D Dual Universal Asynchronous Receiver/Transmitter With FifosNeimar HahmeierNo ratings yet
- ADEC Genset Functions and ParameterDocument52 pagesADEC Genset Functions and ParameterRizki Heru Hermawan83% (23)
- CPM2C Datasheet en 200804 PDFDocument38 pagesCPM2C Datasheet en 200804 PDFCatherineRinNo ratings yet
- Datasheet 8259 PIC OKIDocument29 pagesDatasheet 8259 PIC OKIasemenatokatevasoNo ratings yet
- Tda 1548Document20 pagesTda 1548Jennifer NealNo ratings yet
- Micro Programmable Controller: Cpm1ADocument22 pagesMicro Programmable Controller: Cpm1Akrryy88No ratings yet
- LS7183 / LS7184: Encoder To Counter Interface ChipsDocument3 pagesLS7183 / LS7184: Encoder To Counter Interface ChipsAgim ZilkicNo ratings yet
- GM16C550Document23 pagesGM16C550kranti06No ratings yet
- ID-20MF RFID Reader Module 13.56MHz HFDocument13 pagesID-20MF RFID Reader Module 13.56MHz HFAbleIDLtdNo ratings yet
- G2B and G3B CANopen FDocument12 pagesG2B and G3B CANopen Fangel silvaNo ratings yet
- KT60KM06Document2 pagesKT60KM06Luciano DiasNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Useful Python Libraries For Network EngineersDocument50 pagesUseful Python Libraries For Network EngineersLAngel ReyesNo ratings yet
- Dbms Lab Assignment-8: Answer All The QuestionsDocument6 pagesDbms Lab Assignment-8: Answer All The QuestionsVEMULA KASINATH 20MIA1109No ratings yet
- Governance and Ethics of AIDocument7 pagesGovernance and Ethics of AIIJRASETPublicationsNo ratings yet
- LS Retail Data Director User GuideDocument28 pagesLS Retail Data Director User GuideJad EL HittiNo ratings yet
- Digital Marketing 1689487994037Document2 pagesDigital Marketing 1689487994037venugopalaprabhugNo ratings yet
- Siprotec 7ut87 ProfileDocument2 pagesSiprotec 7ut87 ProfileGilang Dwi PrasetyoNo ratings yet
- 1.what Is Talend Software? What Is A Project in Talend? Why Is Talend Called A Code Generator?Document3 pages1.what Is Talend Software? What Is A Project in Talend? Why Is Talend Called A Code Generator?dante-kun3No ratings yet
- Lecture 22 - Python Datatypes, Variables, Input Output StatementsDocument66 pagesLecture 22 - Python Datatypes, Variables, Input Output StatementsDileep LNo ratings yet
- Aomei Backupper: User ManualDocument74 pagesAomei Backupper: User ManualBruno BredaNo ratings yet
- WIF SM-P610 Galaxy Tab S6 Lite EN TC 040620 FINALDocument2 pagesWIF SM-P610 Galaxy Tab S6 Lite EN TC 040620 FINALSheritiNo ratings yet
- Aloha Configuration CenterDocument2 pagesAloha Configuration Centerabigail_tito123No ratings yet
- Sencha Ext Js 5 Bootcamp in A Book PaperbackDocument3 pagesSencha Ext Js 5 Bootcamp in A Book PaperbackAnonymous 8WF9NYNo ratings yet
- Chapter4 Deadlock Imp QuestionsDocument31 pagesChapter4 Deadlock Imp Questionsjo100% (3)
- Introduction To Profibus DP: Busworks 900Pb Series Profibus/Rs485 Network I/O Modules Technical ReferenceDocument38 pagesIntroduction To Profibus DP: Busworks 900Pb Series Profibus/Rs485 Network I/O Modules Technical ReferenceDineshkumarNo ratings yet
- SOP For Students (Laptop)Document28 pagesSOP For Students (Laptop)Aditya PilaniaNo ratings yet
- W2 C2 Student WorksheetDocument11 pagesW2 C2 Student WorksheetCamilo Prada vargasNo ratings yet
- Steven Patti Brings Multibuzzmarketing - Com To New HeightsDocument2 pagesSteven Patti Brings Multibuzzmarketing - Com To New HeightsPR.comNo ratings yet
- Blockchain & Bitcoin: Aditya Mohan BBA 3'B'Document10 pagesBlockchain & Bitcoin: Aditya Mohan BBA 3'B'rajivNo ratings yet
- Booth S Multiplication Data Path Control PathDocument19 pagesBooth S Multiplication Data Path Control Pathqaisar ayubNo ratings yet
- Do The UntwistDocument2 pagesDo The UntwistHello misterNo ratings yet
- 10 Activity 1Document2 pages10 Activity 1KyleNo ratings yet
- Purchase Request: Mindanao State UniversityDocument4 pagesPurchase Request: Mindanao State UniversityMuhammad FadelNo ratings yet
- Mid-Week BonanzaDocument4 pagesMid-Week Bonanzaraaj4004No ratings yet
- 07.local Classes in SAP ABAPDocument4 pages07.local Classes in SAP ABAPShashank YerraNo ratings yet
- Current LogDocument64 pagesCurrent LogPatricia MalpartidaNo ratings yet
- Chapter 12 TuplesDocument65 pagesChapter 12 TuplesNanoNo ratings yet
- QR Code Based Library Management System: Mrs. Asmita Dani, Prof. Rajesh. N. PatilDocument8 pagesQR Code Based Library Management System: Mrs. Asmita Dani, Prof. Rajesh. N. PatilMaricar AytonaNo ratings yet
- Ad Hoc Networks PDFDocument8 pagesAd Hoc Networks PDFyash virkNo ratings yet
- VDI Best PracticesDocument1 pageVDI Best PracticesSanga SandeepNo ratings yet
- ICNSCET19-International Conference On New Scientific Creations in Engineering and TechnologyDocument11 pagesICNSCET19-International Conference On New Scientific Creations in Engineering and TechnologyDeka MNo ratings yet