
Critical Clearing Time - DFIG
Critical Clearing Time - DFIG
You might also like
- Earth (Tell Me Why #116)Document98 pagesEarth (Tell Me Why #116)Minute Mali86% (7)
- Helix Pharma (Private) Limited: Validation ProtocolDocument4 pagesHelix Pharma (Private) Limited: Validation Protocolziauddin bukhari0% (2)
- Dynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineDocument5 pagesDynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineSandeepKumarNo ratings yet
- 4 Analysis and Control of A CDFIGDocument6 pages4 Analysis and Control of A CDFIGAmy Leigh WilliamsNo ratings yet
- Wind TurbineDocument5 pagesWind TurbineAnthony WellsNo ratings yet
- IET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticDocument10 pagesIET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticSuba ShiniNo ratings yet
- Modeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time SimulationsDocument9 pagesModeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time Simulationsmlsawhney2996No ratings yet
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDocument13 pagesNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounNo ratings yet
- Sub 15572Document8 pagesSub 15572Heather CarterNo ratings yet
- Analysis of Transient Performance For DFIG Wind Turbines Under The Open Switch FaultsDocument6 pagesAnalysis of Transient Performance For DFIG Wind Turbines Under The Open Switch Faultsalaaa3No ratings yet
- Rotor Voltage Dynamics in The Doubly Fed Induction Generator During Grid FaultsDocument13 pagesRotor Voltage Dynamics in The Doubly Fed Induction Generator During Grid FaultsMaroju Santosh KiranNo ratings yet
- Vieira 2010Document9 pagesVieira 2010Youssef MajdoubNo ratings yet
- Low Voltage Ride ThroughDocument6 pagesLow Voltage Ride ThroughMona ValikhaniNo ratings yet
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDocument9 pagesSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiNo ratings yet
- Short Circuit Currents of DFIG Based Wind Turbines - Bhatia2016Document6 pagesShort Circuit Currents of DFIG Based Wind Turbines - Bhatia2016zeljko_popovic9740No ratings yet
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNo ratings yet
- A Discussion About A Start-Up Procedure of A Doubly-Fed Induction Generator SystemDocument6 pagesA Discussion About A Start-Up Procedure of A Doubly-Fed Induction Generator Systemgirish19No ratings yet
- Assessing Behavoir of The Outer Crowbar Protection With The Dfig During Grid FaultDocument12 pagesAssessing Behavoir of The Outer Crowbar Protection With The Dfig During Grid Fault121978ahmedNo ratings yet
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDocument6 pagesEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaNo ratings yet
- Fault Analysis of Distribution Network With Wind Turbines of DFIGDocument5 pagesFault Analysis of Distribution Network With Wind Turbines of DFIGalaaa3No ratings yet
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainNo ratings yet
- Simulation of Active and Reactive Power Control of DFIGDocument8 pagesSimulation of Active and Reactive Power Control of DFIGAJER JOURNALNo ratings yet
- Novel Rotor-Side Control Scheme For Doubly Fed Induction Generator To Ride Through Grid FaultsDocument7 pagesNovel Rotor-Side Control Scheme For Doubly Fed Induction Generator To Ride Through Grid FaultsYazan AlsmadiNo ratings yet
- The Dynamic Model of Doubly-Fed Induction Generator Based On Wind TurbineDocument5 pagesThe Dynamic Model of Doubly-Fed Induction Generator Based On Wind TurbineKubendra RaoNo ratings yet
- Juan Carlos Ps Ce 11Document7 pagesJuan Carlos Ps Ce 11Ashik AhmedNo ratings yet
- Direct Torque Control of Brushless Doubly Fed Induction MachineDocument12 pagesDirect Torque Control of Brushless Doubly Fed Induction Machinejagarov4954No ratings yet
- InTech-Comparative Analysis of Dfig Based Wind Farms Control Mode On Long Term Voltage StabilityDocument22 pagesInTech-Comparative Analysis of Dfig Based Wind Farms Control Mode On Long Term Voltage Stabilityhardcore85No ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- 2 Comparative Study of DFIG Power Control Using StatorDocument8 pages2 Comparative Study of DFIG Power Control Using StatorSudhakarReddyNo ratings yet
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDocument11 pagesModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranNo ratings yet
- Reasch PaperDocument8 pagesReasch PaperRajveerNo ratings yet
- Ride-Through Analysis of Doubly Fed Induction Wind-Power Generator Under Unsymmetrical Network DisturbanceDocument8 pagesRide-Through Analysis of Doubly Fed Induction Wind-Power Generator Under Unsymmetrical Network DisturbanceDulal MannaNo ratings yet
- Normalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkDocument6 pagesNormalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkMallikarjunBhiradeNo ratings yet
- Direct Active and Reactive Power Control of DFIG For Wind Energy GenerationDocument9 pagesDirect Active and Reactive Power Control of DFIG For Wind Energy GenerationElectrical ControlNo ratings yet
- Control of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemDocument6 pagesControl of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemSantiago Bonilla RiveraNo ratings yet
- Steady State Analysis of Brushless Doubly Fed Induction Machine Taking Core Loss Into AccountDocument6 pagesSteady State Analysis of Brushless Doubly Fed Induction Machine Taking Core Loss Into AccountnaserhashemniaNo ratings yet
- IeeeeDocument5 pagesIeeeeHarsha VardhanNo ratings yet
- A New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageDocument6 pagesA New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageGomaa Haroun AliNo ratings yet
- Modelling and Simulation of Grid Side Control of DFIG Using Fuzzy and PIDocument8 pagesModelling and Simulation of Grid Side Control of DFIG Using Fuzzy and PIDrYs Kishore BabuNo ratings yet
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiNo ratings yet
- Robust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObserverDocument9 pagesRobust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObservernaserhashemniaNo ratings yet
- 1 s2.0 S1876610213017268 Main PDFDocument10 pages1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranNo ratings yet
- Transient Analysis of Grid-Connected Wind-Driven PMSG, DFIG and SCIG at Fixed and Variable SpeedsDocument18 pagesTransient Analysis of Grid-Connected Wind-Driven PMSG, DFIG and SCIG at Fixed and Variable SpeedsiisteNo ratings yet
- Matlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesDocument22 pagesMatlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesAchraf BourassNo ratings yet
- 7 PDFDocument9 pages7 PDFRevuNo ratings yet
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaNo ratings yet
- Review On Wind Power Generation With Doubly Fed Induction GeneratorDocument6 pagesReview On Wind Power Generation With Doubly Fed Induction GeneratorAbhimanyu YadavNo ratings yet
- Control of A Wind Turbine-Driven Doubly-Fed Induction GeneratorDocument25 pagesControl of A Wind Turbine-Driven Doubly-Fed Induction GeneratorJuan Diego Calsin TapiaNo ratings yet
- Direct Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy ApplicationsDocument6 pagesDirect Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy Applicationsvenky258No ratings yet
- 7 PDFDocument9 pages7 PDFMaroju Santosh KiranNo ratings yet
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilNo ratings yet
- Converter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesDocument5 pagesConverter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesijcsnNo ratings yet
- Power-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemDocument45 pagesPower-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemstarboyNo ratings yet
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocument5 pagesDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariNo ratings yet
- Controlling of DFIG Wind Turbine Under Unbalanced Grid Fault ConditionDocument5 pagesControlling of DFIG Wind Turbine Under Unbalanced Grid Fault ConditionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Cor ZineDocument9 pagesCor ZineStephen BridgesNo ratings yet
- J14Document10 pagesJ14RifanNo ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- A Common-Mode Voltage Reduction Strategy For ADocument6 pagesA Common-Mode Voltage Reduction Strategy For Amalini72No ratings yet
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Volume of ConeDocument1 pageVolume of Conemv1970No ratings yet
- Powerline Safety Clearance SADocument4 pagesPowerline Safety Clearance SAmv1970No ratings yet
- Capacitor Contactors Benedict JägerDocument12 pagesCapacitor Contactors Benedict Jägermv1970No ratings yet
- ABB REL 511 Technical Reference ManualDocument272 pagesABB REL 511 Technical Reference Manualmv1970No ratings yet
- Capacitor Bank SwitchingDocument52 pagesCapacitor Bank Switchingmv1970No ratings yet
- Joslyn VBM Switches InstructionsDocument34 pagesJoslyn VBM Switches Instructionsmv1970No ratings yet
- Sensorless Field OrientedDocument8 pagesSensorless Field Orientedmv1970No ratings yet
- Turbines 101Document184 pagesTurbines 101Juan ElektroNo ratings yet
- Active Front End PWM Rectifier ProblemsDocument5 pagesActive Front End PWM Rectifier Problemsmv1970No ratings yet
- Liberalism: A PrimerDocument32 pagesLiberalism: A PrimerJulio TeehankeeNo ratings yet
- 100 AutoCAD Commands You Should KnowDocument37 pages100 AutoCAD Commands You Should KnowAnonymous TxYttIqsPNo ratings yet
- HTTP 192.168.20.28 GSP Tree Zptree Demo Lista Wo View PontajDocument1 pageHTTP 192.168.20.28 GSP Tree Zptree Demo Lista Wo View Pontajfanehhh 10No ratings yet
- Romer 5e Solutions Manual 05Document23 pagesRomer 5e Solutions Manual 05Matthew100% (1)
- Intro Revit 9Document27 pagesIntro Revit 9Danny Anton AsanzaNo ratings yet
- CompetencyDocument2 pagesCompetencyChristian Gil MananitaNo ratings yet
- Informantional Reaserch Essay 1Document3 pagesInformantional Reaserch Essay 1api-615817090No ratings yet
- Mergal K14Document2 pagesMergal K14amila209No ratings yet
- Laboratory: Building Transportation System ObjectivesDocument3 pagesLaboratory: Building Transportation System ObjectivesyunhogNo ratings yet
- Hyper Local Supply ChainDocument3 pagesHyper Local Supply ChainAishwarya MathurNo ratings yet
- The Same Yet Different: Comparing Ancient Athens and SpartaDocument7 pagesThe Same Yet Different: Comparing Ancient Athens and SpartaElle AurelioNo ratings yet
- QA Sample Resume 2Document7 pagesQA Sample Resume 2Md shadabNo ratings yet
- Rơ Le ToshibaDocument44 pagesRơ Le ToshibaTung Nguyen100% (1)
- Skill Builder 3Document2 pagesSkill Builder 3Abelardo Llenes TalitodNo ratings yet
- Numerical Descriptive Techniques (6 Hours)Document89 pagesNumerical Descriptive Techniques (6 Hours)Kato AkikoNo ratings yet
- Application of Rational Algebraic ExpressionsDocument8 pagesApplication of Rational Algebraic ExpressionsMl PhilNo ratings yet
- A Study On Marketing Activities and Consumer Response For D-MartDocument30 pagesA Study On Marketing Activities and Consumer Response For D-MartUdayabhanu SwainNo ratings yet
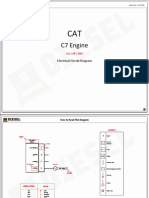
- CAT - C7 (All Others) .Prefix KAL or SAP1-3955Document9 pagesCAT - C7 (All Others) .Prefix KAL or SAP1-3955Phil B.No ratings yet
- Mosd 10page PDFDocument15 pagesMosd 10page PDFOriginalo Versiona100% (3)
- Lab Report 3 Solubility SaponificationDocument9 pagesLab Report 3 Solubility SaponificationJeric Miguel Raquel TabionNo ratings yet
- Poultry Production Climate Control Fresh Air Supply Systems Big Dutchman enDocument8 pagesPoultry Production Climate Control Fresh Air Supply Systems Big Dutchman enBîrle AlexandruNo ratings yet
- Professor Yousef S. H. Najjar (Brief C.V. pp1-7) : University Address Contact InformationDocument29 pagesProfessor Yousef S. H. Najjar (Brief C.V. pp1-7) : University Address Contact Informationramy86No ratings yet
- Chassis: Clutch Manual Transmission Automatic Transmission Transfer Suspension System Brake SteeringDocument90 pagesChassis: Clutch Manual Transmission Automatic Transmission Transfer Suspension System Brake SteeringLuis Fernando Vasquez RamosNo ratings yet
- Finals TheoriesDocument25 pagesFinals TheoriesQui Lea ChinNo ratings yet
- Busbar Design GuideDocument22 pagesBusbar Design Guidejohnwu_2009100% (6)
- Teacher ProfessionalismDocument6 pagesTeacher ProfessionalismRobert MsendoNo ratings yet
- Camera Drone Info and BuildDocument27 pagesCamera Drone Info and BuildMahdi HayouniNo ratings yet
- I. Desired Learning Outcomes: Laboratory Activity 9 Test For ProteinsDocument3 pagesI. Desired Learning Outcomes: Laboratory Activity 9 Test For ProteinsErika Joille PatayonNo ratings yet

































































































Download as pdf or txt
You might also like
- Earth (Tell Me Why #116)Document98 pagesEarth (Tell Me Why #116)Minute Mali86% (7)
- Helix Pharma (Private) Limited: Validation ProtocolDocument4 pagesHelix Pharma (Private) Limited: Validation Protocolziauddin bukhari0% (2)
- Dynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineDocument5 pagesDynamic Model and Simulation of Doubly Feed Induction: Generator Wind TurbineSandeepKumarNo ratings yet
- 4 Analysis and Control of A CDFIGDocument6 pages4 Analysis and Control of A CDFIGAmy Leigh WilliamsNo ratings yet
- Wind TurbineDocument5 pagesWind TurbineAnthony WellsNo ratings yet
- IET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticDocument10 pagesIET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticSuba ShiniNo ratings yet
- Modeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time SimulationsDocument9 pagesModeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time Simulationsmlsawhney2996No ratings yet
- New Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesDocument13 pagesNew Approach For Modelling Doubly-Fed Induction Generator (DFIG) For Grid-Connection StudiesKhalid HarounNo ratings yet
- Sub 15572Document8 pagesSub 15572Heather CarterNo ratings yet
- Analysis of Transient Performance For DFIG Wind Turbines Under The Open Switch FaultsDocument6 pagesAnalysis of Transient Performance For DFIG Wind Turbines Under The Open Switch Faultsalaaa3No ratings yet
- Rotor Voltage Dynamics in The Doubly Fed Induction Generator During Grid FaultsDocument13 pagesRotor Voltage Dynamics in The Doubly Fed Induction Generator During Grid FaultsMaroju Santosh KiranNo ratings yet
- Vieira 2010Document9 pagesVieira 2010Youssef MajdoubNo ratings yet
- Low Voltage Ride ThroughDocument6 pagesLow Voltage Ride ThroughMona ValikhaniNo ratings yet
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDocument9 pagesSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiNo ratings yet
- Short Circuit Currents of DFIG Based Wind Turbines - Bhatia2016Document6 pagesShort Circuit Currents of DFIG Based Wind Turbines - Bhatia2016zeljko_popovic9740No ratings yet
- Doubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsDocument6 pagesDoubly-Fed Induction Machine Models For Stability Assessment of Wind FarmsArun RajendranNo ratings yet
- A Discussion About A Start-Up Procedure of A Doubly-Fed Induction Generator SystemDocument6 pagesA Discussion About A Start-Up Procedure of A Doubly-Fed Induction Generator Systemgirish19No ratings yet
- Assessing Behavoir of The Outer Crowbar Protection With The Dfig During Grid FaultDocument12 pagesAssessing Behavoir of The Outer Crowbar Protection With The Dfig During Grid Fault121978ahmedNo ratings yet
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDocument6 pagesEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaNo ratings yet
- Fault Analysis of Distribution Network With Wind Turbines of DFIGDocument5 pagesFault Analysis of Distribution Network With Wind Turbines of DFIGalaaa3No ratings yet
- Efficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsDocument7 pagesEfficiency Aspects of Vector Control Applied To Synchronous Reluctance MotorsNeeraj GahlainNo ratings yet
- Simulation of Active and Reactive Power Control of DFIGDocument8 pagesSimulation of Active and Reactive Power Control of DFIGAJER JOURNALNo ratings yet
- Novel Rotor-Side Control Scheme For Doubly Fed Induction Generator To Ride Through Grid FaultsDocument7 pagesNovel Rotor-Side Control Scheme For Doubly Fed Induction Generator To Ride Through Grid FaultsYazan AlsmadiNo ratings yet
- The Dynamic Model of Doubly-Fed Induction Generator Based On Wind TurbineDocument5 pagesThe Dynamic Model of Doubly-Fed Induction Generator Based On Wind TurbineKubendra RaoNo ratings yet
- Juan Carlos Ps Ce 11Document7 pagesJuan Carlos Ps Ce 11Ashik AhmedNo ratings yet
- Direct Torque Control of Brushless Doubly Fed Induction MachineDocument12 pagesDirect Torque Control of Brushless Doubly Fed Induction Machinejagarov4954No ratings yet
- InTech-Comparative Analysis of Dfig Based Wind Farms Control Mode On Long Term Voltage StabilityDocument22 pagesInTech-Comparative Analysis of Dfig Based Wind Farms Control Mode On Long Term Voltage Stabilityhardcore85No ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- 2 Comparative Study of DFIG Power Control Using StatorDocument8 pages2 Comparative Study of DFIG Power Control Using StatorSudhakarReddyNo ratings yet
- Model-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsDocument11 pagesModel-Based Predictive Direct Power Control of Doubly Fed Induction GeneratorsMaroju Santosh KiranNo ratings yet
- Reasch PaperDocument8 pagesReasch PaperRajveerNo ratings yet
- Ride-Through Analysis of Doubly Fed Induction Wind-Power Generator Under Unsymmetrical Network DisturbanceDocument8 pagesRide-Through Analysis of Doubly Fed Induction Wind-Power Generator Under Unsymmetrical Network DisturbanceDulal MannaNo ratings yet
- Normalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkDocument6 pagesNormalized Dynamic Simulation of 3-Phase Induction Motor Using Matlab/SimulinkMallikarjunBhiradeNo ratings yet
- Direct Active and Reactive Power Control of DFIG For Wind Energy GenerationDocument9 pagesDirect Active and Reactive Power Control of DFIG For Wind Energy GenerationElectrical ControlNo ratings yet
- Control of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemDocument6 pagesControl of A Power Circuit Interface of A Flywheel-Based Energy Stor-Age SystemSantiago Bonilla RiveraNo ratings yet
- Steady State Analysis of Brushless Doubly Fed Induction Machine Taking Core Loss Into AccountDocument6 pagesSteady State Analysis of Brushless Doubly Fed Induction Machine Taking Core Loss Into AccountnaserhashemniaNo ratings yet
- IeeeeDocument5 pagesIeeeeHarsha VardhanNo ratings yet
- A New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageDocument6 pagesA New Method For Voltage and Frequency Control of Stand-Alone Self-Excited Induction Generator Using PWM Converter With Variable DC Link VoltageGomaa Haroun AliNo ratings yet
- Modelling and Simulation of Grid Side Control of DFIG Using Fuzzy and PIDocument8 pagesModelling and Simulation of Grid Side Control of DFIG Using Fuzzy and PIDrYs Kishore BabuNo ratings yet
- Synchronous Drive PerformanceDocument8 pagesSynchronous Drive PerformancehaimantiNo ratings yet
- Robust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObserverDocument9 pagesRobust Speed Sensorless Control of Doubly-Fed Induction Machine Based On Input-Output Feedback Linearization Control Using A Sliding-Mode ObservernaserhashemniaNo ratings yet
- 1 s2.0 S1876610213017268 Main PDFDocument10 pages1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranNo ratings yet
- Transient Analysis of Grid-Connected Wind-Driven PMSG, DFIG and SCIG at Fixed and Variable SpeedsDocument18 pagesTransient Analysis of Grid-Connected Wind-Driven PMSG, DFIG and SCIG at Fixed and Variable SpeedsiisteNo ratings yet
- Matlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesDocument22 pagesMatlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesAchraf BourassNo ratings yet
- 7 PDFDocument9 pages7 PDFRevuNo ratings yet
- IEEE PES 12plsdfa20mcmsamDocument7 pagesIEEE PES 12plsdfa20mcmsamParameswararao BillaNo ratings yet
- Review On Wind Power Generation With Doubly Fed Induction GeneratorDocument6 pagesReview On Wind Power Generation With Doubly Fed Induction GeneratorAbhimanyu YadavNo ratings yet
- Control of A Wind Turbine-Driven Doubly-Fed Induction GeneratorDocument25 pagesControl of A Wind Turbine-Driven Doubly-Fed Induction GeneratorJuan Diego Calsin TapiaNo ratings yet
- Direct Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy ApplicationsDocument6 pagesDirect Torque Control of Cascaded Brushless Doubly Fed Induction Generator For Wind Energy Applicationsvenky258No ratings yet
- 7 PDFDocument9 pages7 PDFMaroju Santosh KiranNo ratings yet
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesDocument7 pagesModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilNo ratings yet
- Converter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesDocument5 pagesConverter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesijcsnNo ratings yet
- Power-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemDocument45 pagesPower-Current Controller Based Sliding Mode Control For DFIG-wind Energy Conversion SystemstarboyNo ratings yet
- Doubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemDocument5 pagesDoubly-Fed Induction Generator Control For Variable-Speed Wind Power Generation SystemB Vijay VihariNo ratings yet
- Controlling of DFIG Wind Turbine Under Unbalanced Grid Fault ConditionDocument5 pagesControlling of DFIG Wind Turbine Under Unbalanced Grid Fault ConditionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Cor ZineDocument9 pagesCor ZineStephen BridgesNo ratings yet
- J14Document10 pagesJ14RifanNo ratings yet
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDocument7 pagesA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesNo ratings yet
- An Improved Efficiency of Fuzzy Sliding Mode Cont PDFDocument5 pagesAn Improved Efficiency of Fuzzy Sliding Mode Cont PDFNoureddine BounaslaNo ratings yet
- A Common-Mode Voltage Reduction Strategy For ADocument6 pagesA Common-Mode Voltage Reduction Strategy For Amalini72No ratings yet
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDocument11 pagesDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Volume of ConeDocument1 pageVolume of Conemv1970No ratings yet
- Powerline Safety Clearance SADocument4 pagesPowerline Safety Clearance SAmv1970No ratings yet
- Capacitor Contactors Benedict JägerDocument12 pagesCapacitor Contactors Benedict Jägermv1970No ratings yet
- ABB REL 511 Technical Reference ManualDocument272 pagesABB REL 511 Technical Reference Manualmv1970No ratings yet
- Capacitor Bank SwitchingDocument52 pagesCapacitor Bank Switchingmv1970No ratings yet
- Joslyn VBM Switches InstructionsDocument34 pagesJoslyn VBM Switches Instructionsmv1970No ratings yet
- Sensorless Field OrientedDocument8 pagesSensorless Field Orientedmv1970No ratings yet
- Turbines 101Document184 pagesTurbines 101Juan ElektroNo ratings yet
- Active Front End PWM Rectifier ProblemsDocument5 pagesActive Front End PWM Rectifier Problemsmv1970No ratings yet
- Liberalism: A PrimerDocument32 pagesLiberalism: A PrimerJulio TeehankeeNo ratings yet
- 100 AutoCAD Commands You Should KnowDocument37 pages100 AutoCAD Commands You Should KnowAnonymous TxYttIqsPNo ratings yet
- HTTP 192.168.20.28 GSP Tree Zptree Demo Lista Wo View PontajDocument1 pageHTTP 192.168.20.28 GSP Tree Zptree Demo Lista Wo View Pontajfanehhh 10No ratings yet
- Romer 5e Solutions Manual 05Document23 pagesRomer 5e Solutions Manual 05Matthew100% (1)
- Intro Revit 9Document27 pagesIntro Revit 9Danny Anton AsanzaNo ratings yet
- CompetencyDocument2 pagesCompetencyChristian Gil MananitaNo ratings yet
- Informantional Reaserch Essay 1Document3 pagesInformantional Reaserch Essay 1api-615817090No ratings yet
- Mergal K14Document2 pagesMergal K14amila209No ratings yet
- Laboratory: Building Transportation System ObjectivesDocument3 pagesLaboratory: Building Transportation System ObjectivesyunhogNo ratings yet
- Hyper Local Supply ChainDocument3 pagesHyper Local Supply ChainAishwarya MathurNo ratings yet
- The Same Yet Different: Comparing Ancient Athens and SpartaDocument7 pagesThe Same Yet Different: Comparing Ancient Athens and SpartaElle AurelioNo ratings yet
- QA Sample Resume 2Document7 pagesQA Sample Resume 2Md shadabNo ratings yet
- Rơ Le ToshibaDocument44 pagesRơ Le ToshibaTung Nguyen100% (1)
- Skill Builder 3Document2 pagesSkill Builder 3Abelardo Llenes TalitodNo ratings yet
- Numerical Descriptive Techniques (6 Hours)Document89 pagesNumerical Descriptive Techniques (6 Hours)Kato AkikoNo ratings yet
- Application of Rational Algebraic ExpressionsDocument8 pagesApplication of Rational Algebraic ExpressionsMl PhilNo ratings yet
- A Study On Marketing Activities and Consumer Response For D-MartDocument30 pagesA Study On Marketing Activities and Consumer Response For D-MartUdayabhanu SwainNo ratings yet
- CAT - C7 (All Others) .Prefix KAL or SAP1-3955Document9 pagesCAT - C7 (All Others) .Prefix KAL or SAP1-3955Phil B.No ratings yet
- Mosd 10page PDFDocument15 pagesMosd 10page PDFOriginalo Versiona100% (3)
- Lab Report 3 Solubility SaponificationDocument9 pagesLab Report 3 Solubility SaponificationJeric Miguel Raquel TabionNo ratings yet
- Poultry Production Climate Control Fresh Air Supply Systems Big Dutchman enDocument8 pagesPoultry Production Climate Control Fresh Air Supply Systems Big Dutchman enBîrle AlexandruNo ratings yet
- Professor Yousef S. H. Najjar (Brief C.V. pp1-7) : University Address Contact InformationDocument29 pagesProfessor Yousef S. H. Najjar (Brief C.V. pp1-7) : University Address Contact Informationramy86No ratings yet
- Chassis: Clutch Manual Transmission Automatic Transmission Transfer Suspension System Brake SteeringDocument90 pagesChassis: Clutch Manual Transmission Automatic Transmission Transfer Suspension System Brake SteeringLuis Fernando Vasquez RamosNo ratings yet
- Finals TheoriesDocument25 pagesFinals TheoriesQui Lea ChinNo ratings yet
- Busbar Design GuideDocument22 pagesBusbar Design Guidejohnwu_2009100% (6)
- Teacher ProfessionalismDocument6 pagesTeacher ProfessionalismRobert MsendoNo ratings yet
- Camera Drone Info and BuildDocument27 pagesCamera Drone Info and BuildMahdi HayouniNo ratings yet
- I. Desired Learning Outcomes: Laboratory Activity 9 Test For ProteinsDocument3 pagesI. Desired Learning Outcomes: Laboratory Activity 9 Test For ProteinsErika Joille PatayonNo ratings yet