Download as pdf or txt
You might also like
- DK Desserts 400 Recipes PDFDocument306 pagesDK Desserts 400 Recipes PDFLucia Damianidou84% (19)
- HPGD1103 Curriculum DevelopmentDocument15 pagesHPGD1103 Curriculum DevelopmentUina JoNo ratings yet
- TaylorDocument5 pagesTaylorpazrieNo ratings yet
- Representation of Functions by Taylor SeriesDocument4 pagesRepresentation of Functions by Taylor SeriesAsif IqbalNo ratings yet
- LectureNotes - Week 1Document3 pagesLectureNotes - Week 1Matei DanNo ratings yet
- Control TheoryDocument45 pagesControl TheoryGustavo SánchezNo ratings yet
- Taylor ExpansionDocument8 pagesTaylor ExpansionJammy4411No ratings yet
- Differention NmathsDocument26 pagesDifferention NmathsBobNo ratings yet
- Higher Order Derivatives and Taylor Expansions: ExampleDocument4 pagesHigher Order Derivatives and Taylor Expansions: ExampleNorazrizal Aswad Abdul RahmanNo ratings yet
- Chapter 4 Differ en Ti Able FunctionsDocument32 pagesChapter 4 Differ en Ti Able FunctionsJeffrey ChuahNo ratings yet
- Ordinary Differential EquationDocument13 pagesOrdinary Differential EquationMich LadycanNo ratings yet
- Real 20Document4 pagesReal 20spadhiNo ratings yet
- Sol 1Document5 pagesSol 1Dinesh KumarNo ratings yet
- Economics 204 Fall 2012 Problem Set 5 Suggested SolutionsDocument8 pagesEconomics 204 Fall 2012 Problem Set 5 Suggested SolutionsFunWithNumbers88No ratings yet
- Lectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Document4 pagesLectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Saurabh TomarNo ratings yet
- Maths Lecture Part 3 PDFDocument36 pagesMaths Lecture Part 3 PDFJtheMONKEYNo ratings yet
- Real Analysis ProjectDocument14 pagesReal Analysis ProjectAnonymous bpmgNpv50% (2)
- AP Calculus BC Stuff You Must KnowDocument7 pagesAP Calculus BC Stuff You Must KnowJulian PradeepNo ratings yet
- Vol2 IntegralCalculus PDFDocument196 pagesVol2 IntegralCalculus PDFCătălin BordeaNo ratings yet
- Vietnam National UniversityDocument14 pagesVietnam National UniversityQuang VõNo ratings yet
- Math 319 Notes, A.SDocument13 pagesMath 319 Notes, A.SNahitMacitGuntepeNo ratings yet
- Calculus To First ExamDocument9 pagesCalculus To First ExamSteven WalkerNo ratings yet
- Differentiability CHP 5Document17 pagesDifferentiability CHP 5ThiagoDuarteNo ratings yet
- Unit 17: Taylor Approximation: Math 22ADocument4 pagesUnit 17: Taylor Approximation: Math 22ATahzeeb AhmedNo ratings yet
- Extending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence DomainsDocument20 pagesExtending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence Domainstalvane.santos069No ratings yet
- Research On Application of Infinite Series (1st Sem Project)Document26 pagesResearch On Application of Infinite Series (1st Sem Project)Soumyajit BhattacharyaNo ratings yet
- Numerical Methods c2/10Document3 pagesNumerical Methods c2/10Iustin CristianNo ratings yet
- Lecture Notes On Differentiation MATH161 PDFDocument12 pagesLecture Notes On Differentiation MATH161 PDFalchemistNo ratings yet
- Persamaan GelombangDocument7 pagesPersamaan GelombangHikmah InsyirahNo ratings yet
- Ade NPTL NotesDocument207 pagesAde NPTL NotesSaad MalikNo ratings yet
- Instantaneous Rate of Change - The DerivativeDocument7 pagesInstantaneous Rate of Change - The DerivativeTrishul GyNo ratings yet
- Dynamical Systems: Supplementary NotesDocument27 pagesDynamical Systems: Supplementary NotesRoy VeseyNo ratings yet
- New Zealand Mathematical Olympiad Committee Convex FunctionsDocument7 pagesNew Zealand Mathematical Olympiad Committee Convex Functionsalphamale173No ratings yet
- Vector Calculus (1016-410-01) : Plan For The Day - Tuesday 12/4 1 Functions of Several VariablesDocument8 pagesVector Calculus (1016-410-01) : Plan For The Day - Tuesday 12/4 1 Functions of Several VariablesseptemdecillionNo ratings yet
- Numerical DifferentiationDocument2 pagesNumerical DifferentiationChang Jae LeeNo ratings yet
- Numerical MethodsDocument35 pagesNumerical Methodsالصديق عمر الميلاديNo ratings yet
- Rudin 5Document27 pagesRudin 5Cody SageNo ratings yet
- Numerical Integration: Msa / L-6 Cse-3512 - Numerical Methods 27 January, 2005Document3 pagesNumerical Integration: Msa / L-6 Cse-3512 - Numerical Methods 27 January, 2005Al Asad Nur RiyadNo ratings yet
- M2A1: Double Taylor Series & The Jacobian Matrix 1 Double Taylor SeriesDocument2 pagesM2A1: Double Taylor Series & The Jacobian Matrix 1 Double Taylor SeriessompongtNo ratings yet
- Lectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Document4 pagesLectures 26-27: Functions of Several Variables (Continuity, Differentiability, Increment Theorem and Chain Rule)Amir DarabiNo ratings yet
- Numerical Methods NotesDocument21 pagesNumerical Methods Notesdean427No ratings yet
- Numerical Differentiation: NG Tin Yau (PHD)Document18 pagesNumerical Differentiation: NG Tin Yau (PHD)Lam WongNo ratings yet
- The Euler-Lagrange EquationDocument13 pagesThe Euler-Lagrange EquationFeiNo ratings yet
- Problems: TABLE 10.2.1 Values of The Error eDocument10 pagesProblems: TABLE 10.2.1 Values of The Error edinizobardoNo ratings yet
- Problem Set 7Document8 pagesProblem Set 7api-408897152No ratings yet
- Fourier Series With ProblemsDocument30 pagesFourier Series With ProblemsAnuraj N VNo ratings yet
- CProsolsDocument105 pagesCProsolsK Nirmala AnantapurNo ratings yet
- 02 DifferentcdfiationDocument23 pages02 DifferentcdfiationSun JavaNo ratings yet
- EC744 Lecture Note 4 Deterministic DP With Unbounded ReturnsDocument15 pagesEC744 Lecture Note 4 Deterministic DP With Unbounded ReturnsbinicleNo ratings yet
- Electronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeDocument10 pagesElectronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeLuis FuentesNo ratings yet
- Hyperbolic Equations: 8.1 D'Alembert's SolutionDocument10 pagesHyperbolic Equations: 8.1 D'Alembert's Solutionrohit singhNo ratings yet
- Preparatory Questions: 1. Verify That The Function FDocument6 pagesPreparatory Questions: 1. Verify That The Function FTOM DAVISNo ratings yet
- Tutorials MathsDocument6 pagesTutorials MathssaraaanshNo ratings yet
- Solutions To Selected Exercises in Chapter TwoDocument31 pagesSolutions To Selected Exercises in Chapter TwoEDU CIPANANo ratings yet
- Lecture 6-Local ExtremumDocument5 pagesLecture 6-Local ExtremumbananaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Transformation of Axes (Geometry) Mathematics Question BankFrom EverandTransformation of Axes (Geometry) Mathematics Question BankRating: 3 out of 5 stars3/5 (1)
- NCERT Based Test Series 2024 Test - 1Document18 pagesNCERT Based Test Series 2024 Test - 1Arsaniya KumariNo ratings yet
- Unit IG2 - Risk Assessment: Element 9Document42 pagesUnit IG2 - Risk Assessment: Element 9Jithu RajuNo ratings yet
- Handout Bonjour PDFDocument2 pagesHandout Bonjour PDFdart_2000No ratings yet
- Integrated Management of Childhood Illness (IMCI)Document10 pagesIntegrated Management of Childhood Illness (IMCI)Najia Sajjad KhanNo ratings yet
- Potato ProductionDocument6 pagesPotato ProductionviamussNo ratings yet
- Megillah 3Document70 pagesMegillah 3Julian Ungar-SargonNo ratings yet
- Achievement+sheet Ver+01Document1 pageAchievement+sheet Ver+01pl4yerr1No ratings yet
- Application of Value Analysis and Value Engineering For Cost Reduction of Global Pumping UnitDocument8 pagesApplication of Value Analysis and Value Engineering For Cost Reduction of Global Pumping UnitVINOD PAKHARENo ratings yet
- Visual Music EbookDocument30 pagesVisual Music EbookAlessandro RatociNo ratings yet
- Lean Thinking Redefines O&M PracticesDocument10 pagesLean Thinking Redefines O&M PracticesAsel Juárez ViteNo ratings yet
- PARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingDocument3 pagesPARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingarchikakatiyarNo ratings yet
- Arabic EnglishTranslationinthePalestinian Israeliconflict IdeologyinthewingsDocument18 pagesArabic EnglishTranslationinthePalestinian Israeliconflict IdeologyinthewingsAinaa KhaleesyaNo ratings yet
- Manufacturing Digital Twins Ebook FinalDocument27 pagesManufacturing Digital Twins Ebook FinalMuraliNo ratings yet
- Dhan Allyn Romero 11 Saturn ABM EAPPDocument7 pagesDhan Allyn Romero 11 Saturn ABM EAPPJhevie RanileNo ratings yet
- Clean and Unclean Among Jews Christians Brahmins of Kerala: Pollution IdeaDocument13 pagesClean and Unclean Among Jews Christians Brahmins of Kerala: Pollution IdeaGeorge MenacheryNo ratings yet
- Bridgeside Bulletin: Sunday 14th June, 2015 Eleventh Sunday in Ordinary Time, Year BDocument8 pagesBridgeside Bulletin: Sunday 14th June, 2015 Eleventh Sunday in Ordinary Time, Year BCatholic Parish of Forster-TuncurryNo ratings yet
- WSSOA Objective QuestionsDocument6 pagesWSSOA Objective QuestionsAnanthuNo ratings yet
- Government of Kerala: Nursery Teachers Education Course Examination MARCH 2013Document11 pagesGovernment of Kerala: Nursery Teachers Education Course Examination MARCH 2013edujobnewsNo ratings yet
- Del Rosario-Igtiben V RepublicDocument1 pageDel Rosario-Igtiben V RepublicGel TolentinoNo ratings yet
- CSP Report Batch 9Document27 pagesCSP Report Batch 9530-M-004 AVINASH SAI GANGADANo ratings yet
- Chapter 2 PolynomialsDocument39 pagesChapter 2 PolynomialsRamesh RathoreNo ratings yet
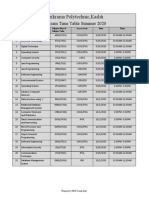
- Parikrama Polytechnic, Kashti: MSBTE TH Exam Time Table Summer 2020Document1 pageParikrama Polytechnic, Kashti: MSBTE TH Exam Time Table Summer 2020pratiksha khamkarNo ratings yet
- South Sudan Early Recovery and Humanitarian Project (Sserhp)Document57 pagesSouth Sudan Early Recovery and Humanitarian Project (Sserhp)kashiNo ratings yet
- DxdiagDocument35 pagesDxdiagCr DickyNo ratings yet
- Open System Theory in NursingDocument43 pagesOpen System Theory in NursingMarivic MisolaNo ratings yet
- Minutes of BOT Meeting - 11.22.2023 (JAZZ)Document24 pagesMinutes of BOT Meeting - 11.22.2023 (JAZZ)antolin.angelo.bcNo ratings yet
- Japanese War Crimes Guide - US National ArchivesDocument1,717 pagesJapanese War Crimes Guide - US National ArchivesderpmilitantNo ratings yet
- Gabion Wall at IntakeDocument13 pagesGabion Wall at IntakeBert EngNo ratings yet