Download as pdf or txt
You might also like
- Gravity Retaining Wall DesignDocument10 pagesGravity Retaining Wall DesignZiaul Haq DoostNo ratings yet
- 4-DMWM Approach For Caching Based Optimal D2D Pairing and Channel Allocation: Centralized and Distributed Algorithm DesignDocument12 pages4-DMWM Approach For Caching Based Optimal D2D Pairing and Channel Allocation: Centralized and Distributed Algorithm DesignKuro ShibaNo ratings yet
- Ubiquitous Access To Distributed Data in Large-Scale Sensor Networks Through Decentralized Erasure CodesDocument7 pagesUbiquitous Access To Distributed Data in Large-Scale Sensor Networks Through Decentralized Erasure CodesMonireh VaNo ratings yet
- Supporting Cooperative Caching in Ad Hoc Networks: Liangzhong Yin, Student Member, IEEE, and Guohong Cao, Member, IEEEDocument13 pagesSupporting Cooperative Caching in Ad Hoc Networks: Liangzhong Yin, Student Member, IEEE, and Guohong Cao, Member, IEEERamsen ShivNo ratings yet
- Structured Pruning of Deep Convolutional Neural Netw Orks: Sajid Anwar, Kyuyeon Hwang and Wonyong SungDocument11 pagesStructured Pruning of Deep Convolutional Neural Netw Orks: Sajid Anwar, Kyuyeon Hwang and Wonyong Sungali shaarawyNo ratings yet
- Capacity of Dynamical Storage Systems: Ohad Elishco Alexander BargDocument25 pagesCapacity of Dynamical Storage Systems: Ohad Elishco Alexander BargGaston GBNo ratings yet
- Maximizing Lifetime For Data Aggregation in Wireless Sensor NetworksDocument12 pagesMaximizing Lifetime For Data Aggregation in Wireless Sensor NetworksivanNo ratings yet
- Paper 5-MDSA Modified Distributed Storage Algorithm For Wireless Sensor NetworksDocument5 pagesPaper 5-MDSA Modified Distributed Storage Algorithm For Wireless Sensor NetworksEditor IJACSANo ratings yet
- Data Memory Organization and Optimizations in Application-Specific SystemsDocument13 pagesData Memory Organization and Optimizations in Application-Specific SystemsGowtham SpNo ratings yet
- Cache Networks: An Information-Theoretic ViewDocument8 pagesCache Networks: An Information-Theoretic ViewAravindVRNo ratings yet
- Fundamental Limits of Cache-Aided Interference ManagementDocument16 pagesFundamental Limits of Cache-Aided Interference Managementistwankai2No ratings yet
- Edge-Caching Wireless Networks: Performance Analysis and OptimizationDocument13 pagesEdge-Caching Wireless Networks: Performance Analysis and OptimizationSONU RATHINo ratings yet
- The Cascading Neural Network: Building The Internet of Smart ThingsDocument28 pagesThe Cascading Neural Network: Building The Internet of Smart ThingsprojascNo ratings yet
- Ijet V3i6p6Document7 pagesIjet V3i6p6International Journal of Engineering and TechniquesNo ratings yet
- 2010 Connected Coverage in WSNs Based On CriticalDocument26 pages2010 Connected Coverage in WSNs Based On CriticalMohamed Hechmi JERIDINo ratings yet
- Energy Latency 4 DataDocument12 pagesEnergy Latency 4 DataACTS TECHNO SOLUTIONSNo ratings yet
- Effectual and Rapid Aggregate Data Collection Using Wireless Sensor NetworkDocument8 pagesEffectual and Rapid Aggregate Data Collection Using Wireless Sensor Networkeditor_ijtelNo ratings yet
- PTEA Algorithm For Wireless P2P Networks in The Presence of Cooperative CacheDocument3 pagesPTEA Algorithm For Wireless P2P Networks in The Presence of Cooperative CacheInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Improved Dijkstra Shortest Path AlgorithmDocument4 pagesAn Improved Dijkstra Shortest Path AlgorithmHo Van RoiNo ratings yet
- Efficient Algorithms For Maximum Lifetime Data Gathering and Aggregation in Wireless Sensor NetworksDocument21 pagesEfficient Algorithms For Maximum Lifetime Data Gathering and Aggregation in Wireless Sensor NetworksivanNo ratings yet
- Genetic Algorithm For Survivable Network Design Problem With Simultaneous Unicast and Anycast FlowsDocument5 pagesGenetic Algorithm For Survivable Network Design Problem With Simultaneous Unicast and Anycast Flowskihe_freetyNo ratings yet
- Distributed Data StorageDocument13 pagesDistributed Data StorageudslvNo ratings yet
- Efficient Random Network Coding For Distributed Storage SystemsDocument10 pagesEfficient Random Network Coding For Distributed Storage SystemsVaziel IvansNo ratings yet
- Caching in WSN A SurveyDocument4 pagesCaching in WSN A SurveyShilpi JainNo ratings yet
- Network Coding For Large Scale Content Distribution: Christos GkantsidisDocument6 pagesNetwork Coding For Large Scale Content Distribution: Christos GkantsidisrrougetrerNo ratings yet
- Optimal Data Aggregation Tree in Wireless Sensor Networks Based On Intelligent Water Drops AlgorithmDocument11 pagesOptimal Data Aggregation Tree in Wireless Sensor Networks Based On Intelligent Water Drops AlgorithmrajmurugaaaNo ratings yet
- A 64-Tile 2.4-Mb in-Memory-Computing CNN Accelerator Employing Charge-Domain ComputeDocument5 pagesA 64-Tile 2.4-Mb in-Memory-Computing CNN Accelerator Employing Charge-Domain ComputeHelloNo ratings yet
- A Heuristic Approach To Re-Allocate Data Fragments in DDBSS: Ali A. Amer Hassan I. AbdallaDocument6 pagesA Heuristic Approach To Re-Allocate Data Fragments in DDBSS: Ali A. Amer Hassan I. Abdallanidee_nishokNo ratings yet
- Uploading and Replicating Internet of Things (Iot) Data On Distributed Cloud StorageDocument9 pagesUploading and Replicating Internet of Things (Iot) Data On Distributed Cloud StorageKartika SariNo ratings yet
- Cross-Layer Strategies For Throughput Maximization in A Data Aggregating Wireless NetworkDocument5 pagesCross-Layer Strategies For Throughput Maximization in A Data Aggregating Wireless Networkhmalrizzo469No ratings yet
- Scaling 0401 PDFDocument12 pagesScaling 0401 PDFAnonymous 9YYQjBh5No ratings yet
- Caching Strategies Based On Information Density Estimation in Wireless Ad Hoc NetworksDocument7 pagesCaching Strategies Based On Information Density Estimation in Wireless Ad Hoc NetworksInternational Journal of computational Engineering research (IJCER)No ratings yet
- WSN ClusteringDocument6 pagesWSN ClusteringSiddharth KumarNo ratings yet
- Joint Aggregation and MAC Design To Prolong Sensor Network Lifetime - ICNP 2013Document10 pagesJoint Aggregation and MAC Design To Prolong Sensor Network Lifetime - ICNP 2013NgocThanhDinhNo ratings yet
- Wang CSPNet A New Backbone That Can Enhance Learning Capability of CVPRW 2020 PaperDocument10 pagesWang CSPNet A New Backbone That Can Enhance Learning Capability of CVPRW 2020 PaperSerxio GarcíaNo ratings yet
- On Cooperative Caching in Wireless P2P NetworksDocument9 pagesOn Cooperative Caching in Wireless P2P NetworksMithlesh YadavNo ratings yet
- V-Matrix-Based Scalable DataDocument14 pagesV-Matrix-Based Scalable Datakk notesNo ratings yet
- Efficient Deep Learning Approach For ComputationalDocument12 pagesEfficient Deep Learning Approach For Computationaltayybahaseeb18No ratings yet
- Cross-Layer Design of Wireless Multihop Backhaul Networks With Multiantenna BeamformingDocument11 pagesCross-Layer Design of Wireless Multihop Backhaul Networks With Multiantenna Beamforming이영희No ratings yet
- Assignment: Submitted ToDocument11 pagesAssignment: Submitted ToMuqaddas FatimaNo ratings yet
- Cross-Layer Designs in Coded Wireless Fading Networks With MulticastDocument14 pagesCross-Layer Designs in Coded Wireless Fading Networks With MulticastJesintha CharlesNo ratings yet
- Effective Cache Based Policies in Wireless Sensor Networks: A SurveyDocument5 pagesEffective Cache Based Policies in Wireless Sensor Networks: A SurveykrishnamoorthyeceNo ratings yet
- Main DocumentationDocument85 pagesMain DocumentationpvssivaprasadcseNo ratings yet
- Research Papers On Wireless Sensor NetworkingDocument5 pagesResearch Papers On Wireless Sensor Networkingfvffv0x7100% (1)
- Energy Efficient Fault Tolerant Data Storage and Processing in Mobile CloudDocument14 pagesEnergy Efficient Fault Tolerant Data Storage and Processing in Mobile CloudvaddeseetharamaiahNo ratings yet
- A Delay-Efficient Algorithm For Data Aggregation in Multihop Wireless Sensor NetworksDocument13 pagesA Delay-Efficient Algorithm For Data Aggregation in Multihop Wireless Sensor Networksbushra_zmNo ratings yet
- An Overflow Problem in Network Coding For Secure Cloud StorageDocument5 pagesAn Overflow Problem in Network Coding For Secure Cloud StoragerajaNo ratings yet
- Optimal Routing and Data Aggregation For Maximizing Lifetime of Wireless Sensor NetworksDocument12 pagesOptimal Routing and Data Aggregation For Maximizing Lifetime of Wireless Sensor NetworksivanNo ratings yet
- Randomized Network Coding in Distributed Storage Systems With Layered OverlayDocument7 pagesRandomized Network Coding in Distributed Storage Systems With Layered OverlayVaziel IvansNo ratings yet
- Datacenter Storage Architecture For Mapreduce Applications: Jeffrey Shafer, Scott Rixner, Alan L. Cox Rice UniversityDocument3 pagesDatacenter Storage Architecture For Mapreduce Applications: Jeffrey Shafer, Scott Rixner, Alan L. Cox Rice Universityhamidsa81No ratings yet
- Power Efficient Data Gathering and Aggregation in Wireless Sensor NetworksDocument6 pagesPower Efficient Data Gathering and Aggregation in Wireless Sensor NetworksUTKARSH156No ratings yet
- K-Means Clustering in WSNDocument5 pagesK-Means Clustering in WSNSergio Andres Diaz SalasNo ratings yet
- Cooperative Cache Management in Mobile Ad Hoc NetworksDocument7 pagesCooperative Cache Management in Mobile Ad Hoc NetworksRuy Lopez ClosedNo ratings yet
- Energy-Optimal Data Aggregation and Dissemination For The Internet of ThingsDocument15 pagesEnergy-Optimal Data Aggregation and Dissemination For The Internet of Thingsdan_intel6735No ratings yet
- Extending Network Lifetime of Wireless Sensor NetworksDocument17 pagesExtending Network Lifetime of Wireless Sensor NetworksAIRCC - IJCNCNo ratings yet
- Energy Efficient Information Fusion in Wireless Sensor NetworksDocument5 pagesEnergy Efficient Information Fusion in Wireless Sensor NetworksBala KumarNo ratings yet
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Document12 pagesIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationNo ratings yet
- A Column Generation Method For Spatial TDMA Scheduling in Ad Hoc NetworksDocument14 pagesA Column Generation Method For Spatial TDMA Scheduling in Ad Hoc Networksanons2472No ratings yet
- Design and Development of An Energy-Efficient Node Address Assignment Algorithm For Large Scale Wireless Sensor NetworksDocument11 pagesDesign and Development of An Energy-Efficient Node Address Assignment Algorithm For Large Scale Wireless Sensor NetworkssmsbariNo ratings yet
- Deep Learning with Python: A Comprehensive Guide to Deep Learning with PythonFrom EverandDeep Learning with Python: A Comprehensive Guide to Deep Learning with PythonNo ratings yet
- Embedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingFrom EverandEmbedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingNo ratings yet
- Instructions MH6D-10 - MH6F-10 PDFDocument65 pagesInstructions MH6D-10 - MH6F-10 PDFEvandro PavesiNo ratings yet
- West Davis Corridor MapDocument1 pageWest Davis Corridor MapCraigFrazerNo ratings yet
- Taste of Afidence June 2012Document7 pagesTaste of Afidence June 2012Barbara HoganNo ratings yet
- Work Area Recovery (WAR) Sevices - An InsightDocument9 pagesWork Area Recovery (WAR) Sevices - An Insightprasenjit_senNo ratings yet
- Sigmacover 350: Overcoating Table For Sigmacover 350 For Dft Up To 150 ΜmDocument2 pagesSigmacover 350: Overcoating Table For Sigmacover 350 For Dft Up To 150 ΜmEngTamerNo ratings yet
- DALI Digital Lighting ControlDocument2 pagesDALI Digital Lighting Controlbusterwong9958No ratings yet
- 'L'Oblat' - The OblateDocument275 pages'L'Oblat' - The OblateFilipe CachideNo ratings yet
- Siebel InstallDocument3 pagesSiebel Installgrkayyappa001No ratings yet
- WinAmp Controller (Kontroller) Source CodeDocument9 pagesWinAmp Controller (Kontroller) Source CodeWorkOfArtNo ratings yet
- Atmel Atf16v8c PLD Datasheet Doc0425Document18 pagesAtmel Atf16v8c PLD Datasheet Doc0425djdharmikNo ratings yet
- Amd E2-Series E2-3000m - Em3000ddx22gxDocument5 pagesAmd E2-Series E2-3000m - Em3000ddx22gxJose ToxquiNo ratings yet
- CH04 COA9e.en - IdDocument46 pagesCH04 COA9e.en - IdKha KimNo ratings yet
- AutoClearOpenGRIR PDFDocument4 pagesAutoClearOpenGRIR PDFMalla RajamanmadhakishoreNo ratings yet
- Procem BrochureDocument20 pagesProcem BrochuremelvinkorahNo ratings yet
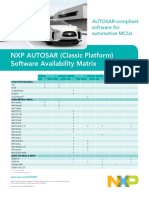
- NXP AUTOSAR (Classic Platform) Software Availability MatrixDocument1 pageNXP AUTOSAR (Classic Platform) Software Availability MatrixNirav DesaiNo ratings yet
- Din 2616Document2 pagesDin 2616Nikola HodakNo ratings yet
- ETAG022-2007 April Part 1Document33 pagesETAG022-2007 April Part 1Serban RaduNo ratings yet
- Analysis and Design of Multi - Storey Building Under Load CombinationDocument8 pagesAnalysis and Design of Multi - Storey Building Under Load CombinationDebendra Dev KhanalNo ratings yet
- CPLDDocument7 pagesCPLDnanbanjayNo ratings yet
- Data Sheet: 802.11ac Dual-Radio 2x2:2 Access Point With Internal Antennas Designed For Density EnvironmentsDocument6 pagesData Sheet: 802.11ac Dual-Radio 2x2:2 Access Point With Internal Antennas Designed For Density EnvironmentsOscar SanchezNo ratings yet
- Toyota SharePoint2013 CSDocument6 pagesToyota SharePoint2013 CSvascomilloNo ratings yet
- Pile Foundation AnalysisDocument3 pagesPile Foundation AnalysisFandy SipataNo ratings yet
- Filinvest Heights Jericho Street QC - Floor PlanDocument1 pageFilinvest Heights Jericho Street QC - Floor PlanMetha Dawn Orolfo-OlivarNo ratings yet
- CU7103 Optical NetworksDocument7 pagesCU7103 Optical NetworksBala913No ratings yet
- Google Maps Android Tutorial EclipseDocument3 pagesGoogle Maps Android Tutorial EclipseDianeNo ratings yet
- VSem BA Economics CoreCourse Computer Application in EconomicsDocument106 pagesVSem BA Economics CoreCourse Computer Application in EconomicsAlina HarnageaNo ratings yet
- AwsDocument8 pagesAwskiranNo ratings yet
- LutronTech Ref Guide Rev G 2008Document144 pagesLutronTech Ref Guide Rev G 2008al9604No ratings yet
- Advanced Computer ArchitectureDocument8 pagesAdvanced Computer Architecturett_aljobory3911No ratings yet