Download as pdf or txt
You might also like
- Application of Linear Algebra in Computer Science and EngineeringDocument5 pagesApplication of Linear Algebra in Computer Science and EngineeringRakibur Rahman75% (4)
- Subject Description: at The End of The Course, The Students Must Be Able To Apply Concepts and Solve Problems Involving Conic Sections, Systems ofDocument5 pagesSubject Description: at The End of The Course, The Students Must Be Able To Apply Concepts and Solve Problems Involving Conic Sections, Systems ofMyla Rose AcobaNo ratings yet
- Geometric Algorithms and Combinatorial OptimizationDocument374 pagesGeometric Algorithms and Combinatorial OptimizationBrigitte Bernstein100% (1)
- 2014 Linear Models in Matrix Form - A Hands-Jonathon D. Brown (Auth.) - Springer PDFDocument548 pages2014 Linear Models in Matrix Form - A Hands-Jonathon D. Brown (Auth.) - Springer PDFAnnh Acosta100% (2)
- CH 15Document15 pagesCH 15Yamaneko ShinNo ratings yet
- GDT ExamplesDocument17 pagesGDT ExamplesAjithNo ratings yet
- Diff ManDocument75 pagesDiff Mank_gh22No ratings yet
- P P R G M L: Geomstats A Ython Ackage For Iemannian Eometry in Achine EarningDocument11 pagesP P R G M L: Geomstats A Ython Ackage For Iemannian Eometry in Achine EarningUno de MadridNo ratings yet
- 3programación Lineal 1 (2022)Document9 pages3programación Lineal 1 (2022)Daniel DazaNo ratings yet
- Research Paper On Integral CalculusDocument7 pagesResearch Paper On Integral Calculusegx124k2100% (1)
- Measure Theory and Lebesgue Integration: Joshua H. Lifton Originally Published 31 March 1999 Revised 5 September 2004Document28 pagesMeasure Theory and Lebesgue Integration: Joshua H. Lifton Originally Published 31 March 1999 Revised 5 September 2004Erdal UnluyolNo ratings yet
- Merge Sort: Divide and ConquerDocument18 pagesMerge Sort: Divide and ConquervinithNo ratings yet
- Overview of Some Solved NP-complete Problems in Graph TheoryDocument11 pagesOverview of Some Solved NP-complete Problems in Graph TheoryAndika Dwi NugrahaNo ratings yet
- Numerical Analysis: From Wikipedia, The Free EncyclopediaDocument23 pagesNumerical Analysis: From Wikipedia, The Free EncyclopediaNikhil JasrotiaNo ratings yet
- Sympy: Definite Integration Via Integration in The Complex Plane ProposalDocument6 pagesSympy: Definite Integration Via Integration in The Complex Plane ProposalrizgarmellaNo ratings yet
- 01 Quantum Inspired MatlabDocument7 pages01 Quantum Inspired MatlabDr-Atul Kumar DwivediNo ratings yet
- Ludecomposition Computerized Method To Solve Linear Programming Problems 2168 9679 1000391Document5 pagesLudecomposition Computerized Method To Solve Linear Programming Problems 2168 9679 1000391TalianaAlarcónNo ratings yet
- 71 Graph Q Learning For CombinatoDocument8 pages71 Graph Q Learning For CombinatoFabian BazzanoNo ratings yet
- Describe The Structure of Mathematical Model in Your Own WordsDocument10 pagesDescribe The Structure of Mathematical Model in Your Own Wordskaranpuri6No ratings yet
- Analyzing of Water Resources Systems Using Linear Programming and Transportation MethodDocument21 pagesAnalyzing of Water Resources Systems Using Linear Programming and Transportation MethodJin AhmedNo ratings yet
- ECL 222 Numerical Methods-Day 2: Department of Physics, University of Colombo Electronics & Computing Laboratary IiDocument28 pagesECL 222 Numerical Methods-Day 2: Department of Physics, University of Colombo Electronics & Computing Laboratary IiyasintharaNo ratings yet
- I Big M - MethodDocument15 pagesI Big M - Methodاحمد محمد ساهيNo ratings yet
- Integer Programming and Cryptography: H. W. Lenstra, JRDocument6 pagesInteger Programming and Cryptography: H. W. Lenstra, JRanitadas19No ratings yet
- Numerical AnalysisDocument7 pagesNumerical Analysisdraganscribd12No ratings yet
- Basic Techniques For Design and Analysis of AlgorithmsDocument3 pagesBasic Techniques For Design and Analysis of AlgorithmsHernan SepulvedaNo ratings yet
- Fem WikipediaDocument11 pagesFem Wikipedialetter_ashish4444No ratings yet
- On Teaching Finite Element Method in Plasticity With MathematicaDocument10 pagesOn Teaching Finite Element Method in Plasticity With MathematicayesullenNo ratings yet
- Analysis and Optimization of An Algorithm For Discrete TomographyDocument32 pagesAnalysis and Optimization of An Algorithm For Discrete TomographystructdesignNo ratings yet
- Gautam Dasgupta (Auth.) - Finite Element Concepts - A Closed-Form Algebraic Development-Springer-Verlag New York (2018)Document358 pagesGautam Dasgupta (Auth.) - Finite Element Concepts - A Closed-Form Algebraic Development-Springer-Verlag New York (2018)Nelson Amorim100% (1)
- Branch and Bound Algorithms - Principles and ExamplesDocument30 pagesBranch and Bound Algorithms - Principles and Examplessaeed-21No ratings yet
- 1 - Intro To AlgorithmsDocument11 pages1 - Intro To AlgorithmsM8R-ya0sm5No ratings yet
- Linear Conic ProgrammingDocument182 pagesLinear Conic Programmingosquitar2004No ratings yet
- Linear ProgrammingDocument8 pagesLinear ProgrammingbeebeeNo ratings yet
- FEM ImplementDocument51 pagesFEM ImplementOlympicMarmotNo ratings yet
- The Big-M Method With The Numerical Infinite M: Optimization Letters October 2021Document15 pagesThe Big-M Method With The Numerical Infinite M: Optimization Letters October 2021Tooba JaniNo ratings yet
- HIR DA R IVE RS ITY IO T: SC Ho Ol of Me CH An Ica L ND Ust Ria L Ee Rin GDocument52 pagesHIR DA R IVE RS ITY IO T: SC Ho Ol of Me CH An Ica L ND Ust Ria L Ee Rin Ghaile mariamNo ratings yet
- Using Matlab in A Multivariable Calculus CourseDocument9 pagesUsing Matlab in A Multivariable Calculus CourseseventhhemanthNo ratings yet
- Complex Analysis Notes 5Document42 pagesComplex Analysis Notes 5kkkNo ratings yet
- ECL 222 Numerical Methods-Day 2: Department of Physics, University of Colombo Electronics & Computing Laboratary IiDocument26 pagesECL 222 Numerical Methods-Day 2: Department of Physics, University of Colombo Electronics & Computing Laboratary IiyasintharaNo ratings yet
- Final Thesis-Lee JDocument30 pagesFinal Thesis-Lee JCường NguyễnNo ratings yet
- Data Structure NotesDocument130 pagesData Structure NotesRamneet ParmarNo ratings yet
- Smplix MethodsDocument14 pagesSmplix Methodsاحمد محمد ساهيNo ratings yet
- Thesis MHP PDFDocument38 pagesThesis MHP PDFaye pyoneNo ratings yet
- Optimization Method Minor Project Levenberg-Marquardt Method Semester 6 3 SSCM 2019/2020Document18 pagesOptimization Method Minor Project Levenberg-Marquardt Method Semester 6 3 SSCM 2019/2020LailaMizukiNo ratings yet
- (Download PDF) Differential Geometry and Lie Groups A Computational Perspective Gallier J Online Ebook All Chapter PDFDocument42 pages(Download PDF) Differential Geometry and Lie Groups A Computational Perspective Gallier J Online Ebook All Chapter PDFeverett.carnes371100% (13)
- Teaching Numerical Analysis With MathcadDocument17 pagesTeaching Numerical Analysis With Mathcadsori1386No ratings yet
- 2003 03 01 MathModelingDocument29 pages2003 03 01 MathModeling'Nabeela MahmoodNo ratings yet
- Numerical AnalysisDocument8 pagesNumerical AnalysisvenkatgramNo ratings yet
- LP 1 Math 5Document29 pagesLP 1 Math 5Gleanna NiedoNo ratings yet
- Metaheuristics Introduction 2Document81 pagesMetaheuristics Introduction 2IREM SEDA YILMAZNo ratings yet
- Math OptimizationDocument11 pagesMath OptimizationAlexander ValverdeNo ratings yet
- حل المعادلة ذات الرتبة الاسيةDocument84 pagesحل المعادلة ذات الرتبة الاسيةNoor AlshibaniNo ratings yet
- Bundle Adjustment: Optimizing Visual Data for Precise ReconstructionFrom EverandBundle Adjustment: Optimizing Visual Data for Precise ReconstructionNo ratings yet
- Direct Linear Transformation: Practical Applications and Techniques in Computer VisionFrom EverandDirect Linear Transformation: Practical Applications and Techniques in Computer VisionNo ratings yet
- Elementary Theory and Application of Numerical Analysis: Revised EditionFrom EverandElementary Theory and Application of Numerical Analysis: Revised EditionNo ratings yet
- The Mimetic Finite Difference Method for Elliptic ProblemsFrom EverandThe Mimetic Finite Difference Method for Elliptic ProblemsNo ratings yet
- Two Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionFrom EverandTwo Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionNo ratings yet
- Thieken - Knee - ACL Reconstruction Rehab Protocol PDFDocument4 pagesThieken - Knee - ACL Reconstruction Rehab Protocol PDFEr Rajesh BuraNo ratings yet
- Tution ApplicationDocument5 pagesTution ApplicationEr Rajesh BuraNo ratings yet
- CC Rakes 130814Document2 pagesCC Rakes 130814Er Rajesh BuraNo ratings yet
- Stone India FDocument2 pagesStone India FEr Rajesh Bura0% (1)
- 6.1 Tractors and Heavy Earth Moving MachineryDocument16 pages6.1 Tractors and Heavy Earth Moving MachineryEr Rajesh Bura100% (1)
- 401XL Crusher Machine ManualDocument12 pages401XL Crusher Machine ManualEr Rajesh BuraNo ratings yet
- Icf MD Spec 268 Issue 01 Rev00Document6 pagesIcf MD Spec 268 Issue 01 Rev00Er Rajesh BuraNo ratings yet
- 1367482635621-Vacuum Air BrakeDocument31 pages1367482635621-Vacuum Air BrakeEr Rajesh BuraNo ratings yet
- (IRFCA) Brake Systems Used by IRDocument4 pages(IRFCA) Brake Systems Used by IREr Rajesh BuraNo ratings yet
- Guidelines & SpecificationsDocument1 pageGuidelines & SpecificationsEr Rajesh BuraNo ratings yet
- K KH Lao OgkjDocument12 pagesK KH Lao OgkjEr Rajesh BuraNo ratings yet
- (IRFCA) Indian Railways FAQ - Rolling Stock - IDocument23 pages(IRFCA) Indian Railways FAQ - Rolling Stock - IEr Rajesh BuraNo ratings yet
- Part 4 of Tender DocumentDocument51 pagesPart 4 of Tender DocumentEr Rajesh BuraNo ratings yet
- 1411306026400-Bit Bank - WorkshopDocument93 pages1411306026400-Bit Bank - WorkshopEr Rajesh BuraNo ratings yet
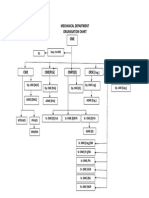
- Mechanical Department Organisation Chart CMEDocument1 pageMechanical Department Organisation Chart CMEEr Rajesh BuraNo ratings yet
- MRRJ If'Pe Jsyos DK Kzy Izkpk Z) I Zos (KD Izf'K (K.K Dsunz) Vtesj La. M 377/Stc/Tentative/Plan Date: 10.11.2012Document4 pagesMRRJ If'Pe Jsyos DK Kzy Izkpk Z) I Zos (KD Izf'K (K.K Dsunz) Vtesj La. M 377/Stc/Tentative/Plan Date: 10.11.2012Er Rajesh BuraNo ratings yet
- Key StatisticsDocument1 pageKey StatisticsEr Rajesh BuraNo ratings yet
- At A GlanceDocument1 pageAt A GlanceEr Rajesh BuraNo ratings yet
- North Western Railway: Mechanical DepartmentDocument1 pageNorth Western Railway: Mechanical DepartmentEr Rajesh BuraNo ratings yet
- PG - Functional 3 - Spectral TheoryDocument7 pagesPG - Functional 3 - Spectral TheoryNirmal KumarNo ratings yet
- GCSE Maths Paper PDFDocument20 pagesGCSE Maths Paper PDFKhasimNo ratings yet
- Math9 Q3 Mod4 ProvingTheoremsOnTheDifferentKindsOfParallelogram v3-EDITEDDocument11 pagesMath9 Q3 Mod4 ProvingTheoremsOnTheDifferentKindsOfParallelogram v3-EDITEDMavis VermillionNo ratings yet
- 3D ProjectionDocument35 pages3D ProjectionjayNo ratings yet
- Protevi - Chapter 4 of DyrDocument16 pagesProtevi - Chapter 4 of DyrMatiasBarrios86No ratings yet
- Angle CalcDocument7 pagesAngle CalcOdie OronicoNo ratings yet
- The Smata Annual Maths Zonal Seminar 2019Document14 pagesThe Smata Annual Maths Zonal Seminar 2019SadaticloNo ratings yet
- Solid Mensuration: Solids For Which Volume, V BHDocument35 pagesSolid Mensuration: Solids For Which Volume, V BHKate ReyesNo ratings yet
- Santa Monica Institute of Technology: COURSE CODE: Mathematics 3 (Teaching Mathematics in The Intermediate Grades)Document16 pagesSanta Monica Institute of Technology: COURSE CODE: Mathematics 3 (Teaching Mathematics in The Intermediate Grades)CJ EtneicapNo ratings yet
- March 28 2023Document21 pagesMarch 28 2023Robert Kim LumaganNo ratings yet
- State Cet Cell: Government of MaharashtraDocument15 pagesState Cet Cell: Government of MaharashtraSeemon KhanNo ratings yet
- MOSIG Animation 1Document76 pagesMOSIG Animation 1Nando ArroyoNo ratings yet
- Chapter 10 Scale DrawwingDocument15 pagesChapter 10 Scale DrawwingNorhazami HashimNo ratings yet
- Cambridge Check Point Mock TestDocument68 pagesCambridge Check Point Mock TestNguyen Dinh Phuong Dai100% (1)
- Math18-Real Number SystemDocument27 pagesMath18-Real Number SystemJennifer GatumbatoNo ratings yet
- Iteration Mark SchemeDocument14 pagesIteration Mark SchemeAyra MujibNo ratings yet
- Introduction To Computer GraphicsDocument47 pagesIntroduction To Computer GraphicsabhishekmietNo ratings yet
- Aviation Formulary V1Document36 pagesAviation Formulary V1ruiop98No ratings yet
- Phys10 Chap10 DynamicsOfRotationalMotionDocument6 pagesPhys10 Chap10 DynamicsOfRotationalMotionEngelbert Bicoy AntodNo ratings yet
- Trigonometry Review: C A S TDocument2 pagesTrigonometry Review: C A S TStephanieNo ratings yet
- Cbse Pre Board Examination - 2020-21 Mathematics Class - X: General InstructionsDocument9 pagesCbse Pre Board Examination - 2020-21 Mathematics Class - X: General InstructionsPoonam PremNo ratings yet
- Types of PolygonsDocument3 pagesTypes of Polygonsanon-919823100% (9)
- PinoyBix Engineering MechanicsDocument59 pagesPinoyBix Engineering MechanicsChris Balmaceda100% (1)
- MOTION PPT First 18 Slides. Including Homeassignment Answers - PPTX With Work Sheet 1Document20 pagesMOTION PPT First 18 Slides. Including Homeassignment Answers - PPTX With Work Sheet 1finu fathimaNo ratings yet
- PT - Mathematics 4 - Q4Document6 pagesPT - Mathematics 4 - Q4Kriselle May DeslateNo ratings yet
- Dummit SolvableDocument18 pagesDummit SolvableArmen AvagyanNo ratings yet
- ch04 Trigonometry From Text BookDocument62 pagesch04 Trigonometry From Text Bookapi-167135013No ratings yet