Download as pdf or txt
You might also like
- Pad Eye Puller DesignDocument5 pagesPad Eye Puller DesignbudygmoodNo ratings yet
- Hi Force CatalogDocument68 pagesHi Force CatalogmjscarNo ratings yet
- SSV Cougar XTC Operatorsl Technical Training Syllabus PDFDocument7 pagesSSV Cougar XTC Operatorsl Technical Training Syllabus PDFlchurch13No ratings yet
- Amclyde M60 Crane SpecificationDocument22 pagesAmclyde M60 Crane SpecificationWong Yew WeiNo ratings yet
- ABS 2014 Steel Vessel Rules - Propellers, SVR - Part - 4 - E-Feb14Document14 pagesABS 2014 Steel Vessel Rules - Propellers, SVR - Part - 4 - E-Feb14cupidkhhNo ratings yet
- Maintainance Toyota AurisDocument4 pagesMaintainance Toyota AurisTomas Astary50% (2)
- Section 8 Windlasses, Winches and Hydraulic Systems: Chapter 2, Section 8, B Chapter 2, Sec-Tion 8, B.3 B.4Document12 pagesSection 8 Windlasses, Winches and Hydraulic Systems: Chapter 2, Section 8, B Chapter 2, Sec-Tion 8, B.3 B.4Suresh KumarNo ratings yet
- BW1350 DNVDocument4 pagesBW1350 DNVharmvdwNo ratings yet
- 20te Tensioner 4-TrackDocument5 pages20te Tensioner 4-TrackjohariakNo ratings yet
- Boring Head ManualDocument2 pagesBoring Head ManualnevadablueNo ratings yet
- General Specifications of Hydraulic CylindersDocument8 pagesGeneral Specifications of Hydraulic CylindersmehrashashankNo ratings yet
- PRS - Diverless Connection System - HorizontalDocument2 pagesPRS - Diverless Connection System - HorizontalPedro DutraNo ratings yet
- Setting The Standard: We Find Out Why Shell Shipping Is The Industry LeaderDocument28 pagesSetting The Standard: We Find Out Why Shell Shipping Is The Industry Leadershihabjamaan8205No ratings yet
- 64-Crane Operator Program NcmscurrentDocument5 pages64-Crane Operator Program NcmscurrentJojo Betanio AkajoknoNo ratings yet
- Novaseptic GMP MixerDocument40 pagesNovaseptic GMP MixerAbarajithan RajendranNo ratings yet
- Emergency Eyewash Station and Safety Shower GuidelinesDocument15 pagesEmergency Eyewash Station and Safety Shower GuidelinesMAHMUD100% (1)
- Onesteel Catalouge - Pipe FittingsDocument48 pagesOnesteel Catalouge - Pipe Fittingsmlennon9910No ratings yet
- NRF 101 PEMEX 2006pedestalcranesDocument62 pagesNRF 101 PEMEX 2006pedestalcranesJose Luis Gutierrez100% (1)
- Gunnebo 2000Document36 pagesGunnebo 2000Ed CalheNo ratings yet
- Offshore Wind Outlook 2019Document98 pagesOffshore Wind Outlook 2019Donato MontroneNo ratings yet
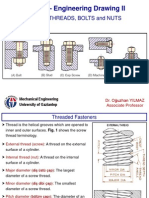
- SCREW THREADS, BOLTS and NUTS PDFDocument10 pagesSCREW THREADS, BOLTS and NUTS PDFhrhgk50% (2)
- Lifting Appliances Guide Jun20Document244 pagesLifting Appliances Guide Jun20cnl filesNo ratings yet
- Straatman Quick Release HooksDocument28 pagesStraatman Quick Release HooksAnonymous iM2totBrNo ratings yet
- B+V User Manual SDS Side Door Elevator ..Document54 pagesB+V User Manual SDS Side Door Elevator ..Valmac ServicesNo ratings yet
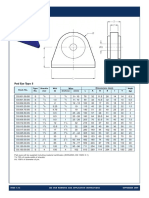
- Paadeye S TypeDocument148 pagesPaadeye S TypeansarALLAAHNo ratings yet
- Ejemplo Sepson-manual-EN-dec - 2014 PDFDocument91 pagesEjemplo Sepson-manual-EN-dec - 2014 PDFAngelNo ratings yet
- Comissionamento Do Sistema de Pull in PDFDocument65 pagesComissionamento Do Sistema de Pull in PDFrfelippe8733No ratings yet
- Hydraulic CylindersDocument7 pagesHydraulic Cylinderspacopil34No ratings yet
- k2 ProfileDocument21 pagesk2 ProfilepreanandNo ratings yet
- ISO - TC67 - SC2 Pipeline Transportation SystemsDocument2 pagesISO - TC67 - SC2 Pipeline Transportation SystemsNilesh MistryNo ratings yet
- Gas Hydrate Tutorial PDFDocument134 pagesGas Hydrate Tutorial PDFGinoNo ratings yet
- 2data Anchor Windlass CapstanDocument56 pages2data Anchor Windlass CapstanFrank RoperNo ratings yet
- 28.GOMA Pump T-8000 CatalougeDocument2 pages28.GOMA Pump T-8000 Catalougeramesh babuNo ratings yet
- ABS Rule Part4 Chapter6 Section1Document8 pagesABS Rule Part4 Chapter6 Section1Kamil AdliNo ratings yet
- Wire Ropes - Bridon Rope - BAC - TechnicalDocument25 pagesWire Ropes - Bridon Rope - BAC - TechnicalJose BijoyNo ratings yet
- Industrial Hose ReelsDocument36 pagesIndustrial Hose Reelsmuamer1No ratings yet
- CH165A-AB: 13,700 LB First Layer Line PullDocument2 pagesCH165A-AB: 13,700 LB First Layer Line Pulliyan supriadiNo ratings yet
- Installing Machine Tools: Here's What To ConsiderDocument1 pageInstalling Machine Tools: Here's What To ConsiderMobile SunNo ratings yet
- Especificaciones20108368 RevisionG ENGR LATESTDocument59 pagesEspecificaciones20108368 RevisionG ENGR LATESTRafael Dutil LucianaNo ratings yet
- RDSO Final Specification CONTR-02-MISC-07Document11 pagesRDSO Final Specification CONTR-02-MISC-07kapilparyaniNo ratings yet
- IADC/SPE 87158 Taut Leg Moorings Using Polyester and VLA AnchorsDocument6 pagesIADC/SPE 87158 Taut Leg Moorings Using Polyester and VLA AnchorsmsmsoftNo ratings yet
- Jack-Up Derrick Barge Ju-251: 1. Name OF Vessel 2. Owners 3. Year Built 4. BuildersDocument8 pagesJack-Up Derrick Barge Ju-251: 1. Name OF Vessel 2. Owners 3. Year Built 4. BuildersNguyễn Việt ÁnhNo ratings yet
- Aquajack ManualDocument40 pagesAquajack ManualPanirChelvan RamanathanNo ratings yet
- Liebherr Oc Ram Luffing Knuckle Boom Crane Series Brochure 170e174 EngDocument2 pagesLiebherr Oc Ram Luffing Knuckle Boom Crane Series Brochure 170e174 EngCarlos Gonzalez TorresNo ratings yet
- Fa2 5a (MHD56114)Document73 pagesFa2 5a (MHD56114)Ed CalheNo ratings yet
- Comparison of FEM, HMI and CMAA Classifications - ProservCrane GroupDocument3 pagesComparison of FEM, HMI and CMAA Classifications - ProservCrane Groupengin gürayNo ratings yet
- TWI Paper On Fatigue and GridingDocument42 pagesTWI Paper On Fatigue and GridingKatsaras SotirisNo ratings yet
- Hydraulic PipingDocument1 pageHydraulic Pipingpandunugraha04100% (1)
- 008 Luis MoirerasDocument35 pages008 Luis Moirerasjaymuscat100% (1)
- Flushing Unit Harben - MineralDocument1 pageFlushing Unit Harben - MineralNyomanIdabagusNo ratings yet
- Worm Gear Operator Quarter Turn Gearbox Model SSBWG ManualDocument16 pagesWorm Gear Operator Quarter Turn Gearbox Model SSBWG ManualArshad PathanNo ratings yet
- DNVGL RU SHIP Pt7Ch1Document215 pagesDNVGL RU SHIP Pt7Ch1Rdg CardosoNo ratings yet
- Fixed Boom Marine Crane - EBIDocument3 pagesFixed Boom Marine Crane - EBIalikajbafNo ratings yet
- Pad EyesDocument2 pagesPad Eyesberry habNo ratings yet
- Seatrax S7226 Crane Data SheetDocument13 pagesSeatrax S7226 Crane Data SheetmanishNo ratings yet
- Manual Maquina HidrogenoDocument35 pagesManual Maquina HidrogenomanuelNo ratings yet
- Brazil StatutoryDocument2 pagesBrazil Statutorydaus nasNo ratings yet
- Mastering Centrifugal PumpsDocument6 pagesMastering Centrifugal PumpsMike Arkouzis100% (1)
- Transportation & Erection of Pressure Vessels (Part of Pressure Vessel Design Manual by Dennis MOSS)Document22 pagesTransportation & Erection of Pressure Vessels (Part of Pressure Vessel Design Manual by Dennis MOSS)faizal rizkiNo ratings yet
- Noise Reduction in Centrifugal Fans: A Literature SurveyDocument29 pagesNoise Reduction in Centrifugal Fans: A Literature SurveyPooria1989No ratings yet
- What Causes Hydraulic Movement at All in A Used New Holland l785Document5 pagesWhat Causes Hydraulic Movement at All in A Used New Holland l785JohnnyLarsonNo ratings yet
- 3 - NCA High Pressure (220 PSIG Rotary Screw) Single Stage CompressorsDocument2 pages3 - NCA High Pressure (220 PSIG Rotary Screw) Single Stage Compressorsdani sanNo ratings yet
- 501 Most Important Physics Questions For NEET and JEEDocument76 pages501 Most Important Physics Questions For NEET and JEEhthjyhNo ratings yet
- 2007 Hyundai Santa Fe Front Suspension Manual - 131222071922-Phpapp01Document29 pages2007 Hyundai Santa Fe Front Suspension Manual - 131222071922-Phpapp01bmiklas100% (1)
- IIT Physics Sample Paper - Rotational Kinematics & DynamicsDocument2 pagesIIT Physics Sample Paper - Rotational Kinematics & DynamicsVikash TiwariNo ratings yet
- CB 8100 Series UGDocument34 pagesCB 8100 Series UGksenthil09No ratings yet
- Termination of Response Spectrum MethodDocument3 pagesTermination of Response Spectrum Methodzhanif0No ratings yet
- TE-6070V Sampler Calibration Worksheet: Site and Calibration Information (Using G-Factor)Document3 pagesTE-6070V Sampler Calibration Worksheet: Site and Calibration Information (Using G-Factor)EDWARDNo ratings yet
- Viscomaster: Viscosity-And Density-Solutions For Fuel Oil ApplicationsDocument8 pagesViscomaster: Viscosity-And Density-Solutions For Fuel Oil ApplicationsWilson PinacateNo ratings yet
- FYDP Group 11 Absorber HAZOP - Benson - CommentDocument52 pagesFYDP Group 11 Absorber HAZOP - Benson - Commentdannie3No ratings yet
- MFG Tooling - 12 Drawing DieDocument10 pagesMFG Tooling - 12 Drawing DieLoveofyouth ReddyNo ratings yet
- Series and Parallel Pump ExperimentDocument17 pagesSeries and Parallel Pump ExperimentCourse OnlyNo ratings yet
- A Combined Experimental and Numerical Analysis of The Wake Structure and Performance of A H-Shaped Darrieus Wind TurbineDocument8 pagesA Combined Experimental and Numerical Analysis of The Wake Structure and Performance of A H-Shaped Darrieus Wind TurbineMostafa RashedNo ratings yet
- PPT#2 PDFDocument63 pagesPPT#2 PDFMary Hazel Sarto, V.No ratings yet
- BORSIG Valve PresentationDocument18 pagesBORSIG Valve PresentationMachineryengNo ratings yet
- DC13072ADocument5 pagesDC13072AEdsonNo ratings yet
- Pergola Detail & PlanDocument5 pagesPergola Detail & PlanKhalil BalanNo ratings yet
- Hydraulic Twin Peaks Model Tests: Pumping Plant: U.S. Department of The InteriorDocument25 pagesHydraulic Twin Peaks Model Tests: Pumping Plant: U.S. Department of The InteriorJerry PellerNo ratings yet
- Engine Model Engine Model: Diesel IndexDocument7 pagesEngine Model Engine Model: Diesel IndexMinh PhươngNo ratings yet
- Bozhko 2018Document13 pagesBozhko 2018sezgin bayramNo ratings yet
- Spreader Bar With LugsDocument15 pagesSpreader Bar With LugsvamsiNo ratings yet
- Technical Datasheet: Engineering SteelDocument1 pageTechnical Datasheet: Engineering Steelraaspoy2007No ratings yet
- Thermodynamic Property MethodsDocument23 pagesThermodynamic Property MethodsfarhaNo ratings yet
- Structure Calculation Sheet For SiloDocument174 pagesStructure Calculation Sheet For Silojohn12345No ratings yet
- Schmidt + Clemens: Weld Repair Practices in High Temperature MaterialsDocument46 pagesSchmidt + Clemens: Weld Repair Practices in High Temperature MaterialsmanojballaNo ratings yet
- ZS11 Overseas ISRAEL Troubleshooting Measuring DTC Manual en 20171212Document1,487 pagesZS11 Overseas ISRAEL Troubleshooting Measuring DTC Manual en 20171212tallerr.360No ratings yet
- En Parts Manual 20-4853Document426 pagesEn Parts Manual 20-4853Armando Orozco GuerraNo ratings yet
- Table of Concrete Design Properties Including Strength PropertiesDocument7 pagesTable of Concrete Design Properties Including Strength PropertiesselinaNo ratings yet