Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Harvard Case Study - AccountingDocument3 pagesHarvard Case Study - AccountingSuman Saurabh MohantyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Electrical & Electronic Circuit Symbols PDFDocument33 pagesElectrical & Electronic Circuit Symbols PDFKishor Kadam100% (1)
- Driving Indian ConsumptionDocument28 pagesDriving Indian ConsumptionSuman Saurabh MohantyNo ratings yet
- 06 Ethics in Practice - Parable of The Sadhu (1999)Document3 pages06 Ethics in Practice - Parable of The Sadhu (1999)Suman Saurabh MohantyNo ratings yet
- Titan Company (TITIND) : Jewellery Segment Growth Expected To SustainDocument11 pagesTitan Company (TITIND) : Jewellery Segment Growth Expected To SustainSuman Saurabh MohantyNo ratings yet
- FSnotes 13 To 16Document11 pagesFSnotes 13 To 16Suman Saurabh MohantyNo ratings yet
- Leading Lean: A Canadian Healthcar e Leader' S Guide: FeatureDocument10 pagesLeading Lean: A Canadian Healthcar e Leader' S Guide: FeatureSuman Saurabh MohantyNo ratings yet
- WHO Data PDFDocument1 pageWHO Data PDFSuman Saurabh MohantyNo ratings yet
- Open Banking'S Next Wave: Perspectives From Three Fintech CeosDocument12 pagesOpen Banking'S Next Wave: Perspectives From Three Fintech CeosSuman Saurabh MohantyNo ratings yet
- Exercise 2: Observing Mode Switching Using A Software InterruptDocument3 pagesExercise 2: Observing Mode Switching Using A Software InterruptSuman Saurabh MohantyNo ratings yet
- Exercise 1: Simple I/O Using Keil SimulatorDocument3 pagesExercise 1: Simple I/O Using Keil SimulatorSuman Saurabh MohantyNo ratings yet
- Aichi Biodiversity TargetsDocument3 pagesAichi Biodiversity TargetsSuman Saurabh MohantyNo ratings yet
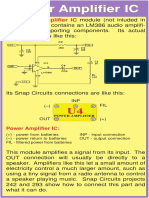
- Space War IC Power Amplifier ICDocument1 pageSpace War IC Power Amplifier ICOctavio ValenzuelaNo ratings yet
- Smart TV Mainboard ZLS47HIS-V1 With Cannot Startup Problem SolvedDocument6 pagesSmart TV Mainboard ZLS47HIS-V1 With Cannot Startup Problem SolveduzenNo ratings yet
- PLC Programming - PLC - PROGRAMOZÁS - ALAPOK - ANGOLDocument57 pagesPLC Programming - PLC - PROGRAMOZÁS - ALAPOK - ANGOLbodijozsefNo ratings yet
- Active Interphase Reactor For 12-Pulse RectifierDocument22 pagesActive Interphase Reactor For 12-Pulse Rectifieralex696No ratings yet
- Design and Development of Power Inverter Using Combinational Switches For Improvement of Efficiency at Light LoadsDocument3 pagesDesign and Development of Power Inverter Using Combinational Switches For Improvement of Efficiency at Light LoadsEditor IJRITCCNo ratings yet
- Analog Electronic CircuitDocument9 pagesAnalog Electronic Circuitajas777BNo ratings yet
- Floor PlanningDocument22 pagesFloor PlanningAnshumeek UpretiNo ratings yet
- EN-09-13-US Rev. 1-Portable-Enraf-Terminal PDFDocument4 pagesEN-09-13-US Rev. 1-Portable-Enraf-Terminal PDFHMIDA ADELNo ratings yet
- DLS-1224DC 12-24V DC-DC Converter DatasheetDocument2 pagesDLS-1224DC 12-24V DC-DC Converter DatasheetchineduNo ratings yet
- Team - ID (CMT ID) Fill Here Project Title Fill Here College Name Fill Here Mentor Name Fill HereDocument1 pageTeam - ID (CMT ID) Fill Here Project Title Fill Here College Name Fill Here Mentor Name Fill HereatharvawazurkarNo ratings yet
- Operational Amplifier and Its Applications: Unit 5Document20 pagesOperational Amplifier and Its Applications: Unit 5Chiraag ChiruNo ratings yet
- NPTEL Joy of Computing Using Python.Document2 pagesNPTEL Joy of Computing Using Python.Barnik Sikder0% (1)
- Auo T460HW02 V2Document31 pagesAuo T460HW02 V2gondifNo ratings yet
- Digital Communication Lecture-2Document73 pagesDigital Communication Lecture-2Fela Nicholas AdekunleNo ratings yet
- End All Red Overdrive: Controls and FeaturesDocument6 pagesEnd All Red Overdrive: Controls and FeaturesBepe uptp5aNo ratings yet
- Data SheetDocument3 pagesData SheetselocaNo ratings yet
- Module 1-Chapter 1 Diode Clipping and ClampingDocument41 pagesModule 1-Chapter 1 Diode Clipping and ClampingummeNo ratings yet
- Gas Detection Microsystem With MEMS Gas Sensor and Integrated CircuitDocument9 pagesGas Detection Microsystem With MEMS Gas Sensor and Integrated CircuitKristoffer MonteiroNo ratings yet
- CS 3351 Digital Principles & Computer OrganizationDocument27 pagesCS 3351 Digital Principles & Computer OrganizationDr.Kalaivazhi100% (3)
- Public Address and Voice Alarm: Training PresentationDocument66 pagesPublic Address and Voice Alarm: Training PresentationRamesh AnanthanarayananNo ratings yet
- Dynamic Power Reduction WPDocument6 pagesDynamic Power Reduction WPRanganadh MvNo ratings yet
- 8051 Microcontroller DataDocument17 pages8051 Microcontroller DataTechqualcerNo ratings yet
- Tda 7850Document18 pagesTda 7850Adrian AguilarNo ratings yet
- Datasheet It8718fDocument189 pagesDatasheet It8718fEduardo Montenegro100% (1)
- Atomic - Dave GCspecs7Document1 pageAtomic - Dave GCspecs7David KasaiNo ratings yet
- Hpjournal 1955 10Document4 pagesHpjournal 1955 10flegiasNo ratings yet
- Samsung x60 Firenze2-RDocument52 pagesSamsung x60 Firenze2-RRizal EfendiNo ratings yet
- Designing of BCD - To-Seven Segment Decoder: Embedded Systems Lab (17CS, 6 Semester) Section 1 Lab Experiment No. 10Document5 pagesDesigning of BCD - To-Seven Segment Decoder: Embedded Systems Lab (17CS, 6 Semester) Section 1 Lab Experiment No. 10NoorNo ratings yet
- Comparison of IGBT and GTO For High Power Inverters PDFDocument9 pagesComparison of IGBT and GTO For High Power Inverters PDFLuis Eduardo RibeiroNo ratings yet