
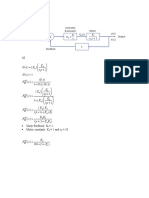
Feedback System Stability: S S S S G
Feedback System Stability: S S S S G
You might also like
- Module Descriptions 2021-2022Document77 pagesModule Descriptions 2021-2022BowackNo ratings yet
- 10 Root LocusDocument13 pages10 Root LocusAhmed Tanveer Ashraff100% (1)
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocument31 pagesB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- 15 Root Locus123Document4 pages15 Root Locus123rjkadivarNo ratings yet
- Root Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100Document29 pagesRoot Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100anas habashNo ratings yet
- State Feedback ControlDocument17 pagesState Feedback ControlcallsandhyaNo ratings yet
- Root LocusDocument27 pagesRoot LocusAzmi Bin A MataliNo ratings yet
- CIE-305-Topic8 - Root LocusDocument38 pagesCIE-305-Topic8 - Root LocusSanjay KansalNo ratings yet
- Chapter 6 Stability of Linear Control Systems: 6-1 (A) (B) (C) (D) (E) (F)Document13 pagesChapter 6 Stability of Linear Control Systems: 6-1 (A) (B) (C) (D) (E) (F)Enzo CraviottoNo ratings yet
- Answers LU4 PDFDocument4 pagesAnswers LU4 PDFJEFT MOKWENANo ratings yet
- Root LocusDocument18 pagesRoot LocusgigoNo ratings yet
- Root LocusDocument44 pagesRoot LocusDheer MehrotraNo ratings yet
- Control System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Document49 pagesControl System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Junaidy VandeanganNo ratings yet
- EMS507 Lecture 3 - System StabilityDocument21 pagesEMS507 Lecture 3 - System Stability124ll124No ratings yet
- Chapter 6Document39 pagesChapter 6Mohamed KhalidNo ratings yet
- Tutorial D2 2 Solutions2020Document5 pagesTutorial D2 2 Solutions2020ivancxyew13No ratings yet
- Chapter 3 - Synthesis of Analog CircuitsDocument27 pagesChapter 3 - Synthesis of Analog CircuitsMahmoud DoughanNo ratings yet
- Analysis of Mechanism of Dew Point Measurement Using A Colpitts Oscillation CircuitDocument6 pagesAnalysis of Mechanism of Dew Point Measurement Using A Colpitts Oscillation Circuitmanish53970No ratings yet
- 1D Spring Systems Finite Element AnalysisDocument8 pages1D Spring Systems Finite Element AnalysisThahir ShahNo ratings yet
- Root Locus Diagram: Upon Completion of This Chapter You Will Be Able ToDocument24 pagesRoot Locus Diagram: Upon Completion of This Chapter You Will Be Able ToGnanendraReddyNo ratings yet
- EE301 PracticeQuestions2 2022Document6 pagesEE301 PracticeQuestions2 2022SonuNo ratings yet
- F44128640 Homework 2 LCS DING JoelDocument16 pagesF44128640 Homework 2 LCS DING JoelNotnowNo ratings yet
- Chapter 11 Chang.2Document39 pagesChapter 11 Chang.2satya sagarNo ratings yet
- Root LocusDocument114 pagesRoot LocusSwapneel NaphadeNo ratings yet
- 55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaDocument36 pages55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaSandeep K AugustineNo ratings yet
- Week 8Document35 pagesWeek 8usmanshah1998.usNo ratings yet
- Gyrostellar EstimationDocument6 pagesGyrostellar EstimationMarcAlomarPayerasNo ratings yet
- Kronig PenneyDocument25 pagesKronig PenneyAbel Tom100% (1)
- Control Systems Engineering D227 Solutions Q 2003: 8) 3) (S S (S K G (Ol) + +Document2 pagesControl Systems Engineering D227 Solutions Q 2003: 8) 3) (S S (S K G (Ol) + +Chintu GurbaniNo ratings yet
- Assignment 3Document3 pagesAssignment 3sethyashis456No ratings yet
- Root Locus Method 2Document33 pagesRoot Locus Method 2Patel DipenNo ratings yet
- Determination of Electrode PotentialsDocument26 pagesDetermination of Electrode PotentialsGliezl ImperialNo ratings yet
- Test Models For Statistical Inference: Two-Dimensional Reaction Systems Displaying Limit Cycle Bifurcations and BistabilityDocument21 pagesTest Models For Statistical Inference: Two-Dimensional Reaction Systems Displaying Limit Cycle Bifurcations and BistabilityStatistics Office MakwanpurNo ratings yet
- 1437235816control Systems (K-Wiki Root Locus) PDFDocument24 pages1437235816control Systems (K-Wiki Root Locus) PDFRitarshiChakrabortyNo ratings yet
- 1631 Topic11Document10 pages1631 Topic11Mauricio Sanchez PortillaNo ratings yet
- MIT16 06F12 Lecture 13 PDFDocument6 pagesMIT16 06F12 Lecture 13 PDFPhuoc HoNo ratings yet
- Solutions ComparingDocument3 pagesSolutions ComparingHusain BaradNo ratings yet
- Root LocusDocument43 pagesRoot LocusSanthosh SNo ratings yet
- A Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersDocument12 pagesA Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersmcamhkNo ratings yet
- Colorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M PDocument6 pagesColorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M Parpit gargNo ratings yet
- Ziegler-Nichols Controller Tuning ExampleDocument6 pagesZiegler-Nichols Controller Tuning ExampleChristine AvdikouNo ratings yet
- t7 PDFDocument13 pagest7 PDFKj_bdNo ratings yet
- Unit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems IDocument6 pagesUnit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Control SystemsDocument94 pagesControl SystemsVaibhav DangeNo ratings yet
- CH 06Document13 pagesCH 06HKVMVPVPV021511No ratings yet
- Chapter 6Document25 pagesChapter 6chalaNo ratings yet
- 51 - 0 - 15 - Solutions Unit III Assignment IIDocument54 pages51 - 0 - 15 - Solutions Unit III Assignment IIGapitoNo ratings yet
- PID ControllerDocument32 pagesPID ControllerjosemiguelvillafuerteNo ratings yet
- Time ResponseDocument14 pagesTime ResponseRilwanNo ratings yet
- Matter Waves: PH 333: Quantum PhysicsDocument22 pagesMatter Waves: PH 333: Quantum PhysicsAntonio BernardoNo ratings yet
- Falsified Kinetics:: K C C KCDocument3 pagesFalsified Kinetics:: K C C KCedelmandalaNo ratings yet
- Problem PR02.1Document22 pagesProblem PR02.1AliNo ratings yet
- Colorado School of Mines CHEN403: Ziegler-Nichols Controller Tuning ExampleDocument6 pagesColorado School of Mines CHEN403: Ziegler-Nichols Controller Tuning ExamplefalconalnajjarNo ratings yet
- Kriging: Reservoir Modeling With GSLIBDocument16 pagesKriging: Reservoir Modeling With GSLIBAhmad GuskarnaliNo ratings yet
- Lecture - 12 - Stabiity Analysis TechniquesDocument80 pagesLecture - 12 - Stabiity Analysis TechniquesAbdelrhman AbdullahNo ratings yet
- Lecture 8 Steady State ErrorDocument22 pagesLecture 8 Steady State ErrorMannuel Ignacio MatillanoNo ratings yet
- Control System 2 (Cont of 1)Document13 pagesControl System 2 (Cont of 1)K.Magenthran (UTHM)No ratings yet
- Numerical Methods For EngineersDocument17 pagesNumerical Methods For EngineersMahir MahmoodNo ratings yet
- Replaced Fall 2010 Course Outline For Engineering 36 Engineering Mechanics - Statics Catalog DescriptionDocument5 pagesReplaced Fall 2010 Course Outline For Engineering 36 Engineering Mechanics - Statics Catalog DescriptionMahir MahmoodNo ratings yet
- Statics: ENGR 01.271 - Fall 2006 Section Place Meeting Times Instructor Office HoursDocument2 pagesStatics: ENGR 01.271 - Fall 2006 Section Place Meeting Times Instructor Office HoursMahir MahmoodNo ratings yet
- Are The Reactions at C in The Two Cases?: Problem 5.49 The Tension in Cable AB Is 2 Kn. WhatDocument5 pagesAre The Reactions at C in The Two Cases?: Problem 5.49 The Tension in Cable AB Is 2 Kn. WhatMahir MahmoodNo ratings yet
- Prerequisite:: The Ability To Determine Forces and Stresses in Elementary Structural SystemsDocument5 pagesPrerequisite:: The Ability To Determine Forces and Stresses in Elementary Structural SystemsMahir MahmoodNo ratings yet
- Centroids.: Problem 7.29 Determine The Coordinates of The SolutionDocument3 pagesCentroids.: Problem 7.29 Determine The Coordinates of The SolutionMahir MahmoodNo ratings yet
- HW 1Document1 pageHW 1Mahir MahmoodNo ratings yet
- Kirch Off Appendix BDocument9 pagesKirch Off Appendix BMahir MahmoodNo ratings yet
- 14 Thermal Lab 2009Document7 pages14 Thermal Lab 2009Mahir MahmoodNo ratings yet
- Creating Detail Drawings: BackgroundDocument3 pagesCreating Detail Drawings: BackgroundMahir MahmoodNo ratings yet
- ADDII 1 Electrical Symbols SheetDocument1 pageADDII 1 Electrical Symbols SheetMahir MahmoodNo ratings yet
- 24-361 Intermediate Stress Analysis Project #1: Part I: Due Thursday February 5Document3 pages24-361 Intermediate Stress Analysis Project #1: Part I: Due Thursday February 5Mahir MahmoodNo ratings yet
- ANSYS Resources06Document2 pagesANSYS Resources06Mahir MahmoodNo ratings yet
- Vector SpacesDocument20 pagesVector SpacesValentio100% (1)
- Mathematics Arithmetic and Number Sense Algebra Geometry: (Answer Many Word Problems As Possible)Document5 pagesMathematics Arithmetic and Number Sense Algebra Geometry: (Answer Many Word Problems As Possible)DarleneNo ratings yet
- Complete: MathematicsDocument21 pagesComplete: Mathematicsarcanum780% (1)
- Instabilities: 5.1 Kelvin-Helmholtz InstabilityDocument24 pagesInstabilities: 5.1 Kelvin-Helmholtz Instabilityca6tik01No ratings yet
- 1st - & - 2nd - Sem - Diploma SyllabusDocument50 pages1st - & - 2nd - Sem - Diploma Syllabusvj4249No ratings yet
- College and Advanced AlgebraDocument11 pagesCollege and Advanced AlgebraCRING TVNo ratings yet
- Quaternion ConradDocument19 pagesQuaternion ConradWalter ariel BayaNo ratings yet
- BTech Mechanical Engineering SyllabusDocument190 pagesBTech Mechanical Engineering Syllabusprasaad7No ratings yet
- Std12 Maths EM 1 WWW - Governmentexams.co - inDocument297 pagesStd12 Maths EM 1 WWW - Governmentexams.co - inSarathyNo ratings yet
- 12th Maths Volume1 PDFDocument304 pages12th Maths Volume1 PDFrama krishna67% (3)
- Fourier Series and Fourier TransformsDocument13 pagesFourier Series and Fourier TransformsbjayachanderraoNo ratings yet
- Annex1 Module Handbook-PEDocument128 pagesAnnex1 Module Handbook-PEAmelSiljo2No ratings yet
- Anti-Swing Control of The Pendubot Using Damper and Spring With Positive or Negative StiffnessDocument20 pagesAnti-Swing Control of The Pendubot Using Damper and Spring With Positive or Negative StiffnessAbdullah ÇakanNo ratings yet
- Curs Analiza MatematicaDocument407 pagesCurs Analiza MatematicaIra LoghinNo ratings yet
- Trigonometry HandbookDocument60 pagesTrigonometry HandbookJayakumar SankaranNo ratings yet
- BLL ExportDocument372 pagesBLL Exportpnmawade123No ratings yet
- Sanchez 07 Poles and Zeros of Transfer FunctionsDocument20 pagesSanchez 07 Poles and Zeros of Transfer FunctionsYasmin KayeNo ratings yet
- Complex Analysis - George Cain (Title Page and Table of Contents)Document3 pagesComplex Analysis - George Cain (Title Page and Table of Contents)Roberto Armenta100% (1)
- Jee SylabusDocument9 pagesJee SylabusmishrajishreyanshpratapNo ratings yet
- More Than 5000 Questions Dr. BL Sharma Mathematics PageDocument4 pagesMore Than 5000 Questions Dr. BL Sharma Mathematics Pagerskr_tNo ratings yet
- Influence of ACSR Steel Core Permeability On Entire Conductor's Load ParametersDocument4 pagesInfluence of ACSR Steel Core Permeability On Entire Conductor's Load ParametersMustafa JobehNo ratings yet
- Construction Economics B-Assignment 01Document9 pagesConstruction Economics B-Assignment 01swarnapuraNo ratings yet
- 17.4.2 - Homogeneous Equations With Constant Coefficients Higher OrderDocument14 pages17.4.2 - Homogeneous Equations With Constant Coefficients Higher Orderanon_422073337100% (1)
- Circuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling PDFDocument618 pagesCircuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling PDFOscar Iñaky Hernández HernándezNo ratings yet
- Imaginary Mathematics For Computer Science (John Vince) (Z-Library)Document309 pagesImaginary Mathematics For Computer Science (John Vince) (Z-Library)sbwjlvnbsNo ratings yet
- REVISED (Maths) - INC JR IIT CO SPARK - TEACHING SCHEDULE& QP ALLOTMENT - 2022-23 (CODE - GREEN-3) @030-08-2022Document11 pagesREVISED (Maths) - INC JR IIT CO SPARK - TEACHING SCHEDULE& QP ALLOTMENT - 2022-23 (CODE - GREEN-3) @030-08-2022VamshiNo ratings yet
- Mathematics of Physics and Engineering PDFDocument498 pagesMathematics of Physics and Engineering PDFRohmani100% (2)
- Proposed Inc JR Iit Co Super Chaina & Super Chaina N120& N120 - Micro Schedule - 2022-23 (Code - Ashadam Bonalu)Document31 pagesProposed Inc JR Iit Co Super Chaina & Super Chaina N120& N120 - Micro Schedule - 2022-23 (Code - Ashadam Bonalu)Chakresh techNo ratings yet
- Birla Institute of Technology and Science, Pilani Pilani Campus AUGS/ AGSR DivisionDocument4 pagesBirla Institute of Technology and Science, Pilani Pilani Campus AUGS/ AGSR DivisionPriyam VermaNo ratings yet




































































































Download as ppt, pdf, or txt
You might also like
- Module Descriptions 2021-2022Document77 pagesModule Descriptions 2021-2022BowackNo ratings yet
- 10 Root LocusDocument13 pages10 Root LocusAhmed Tanveer Ashraff100% (1)
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocument31 pagesB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- 15 Root Locus123Document4 pages15 Root Locus123rjkadivarNo ratings yet
- Root Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100Document29 pagesRoot Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100anas habashNo ratings yet
- State Feedback ControlDocument17 pagesState Feedback ControlcallsandhyaNo ratings yet
- Root LocusDocument27 pagesRoot LocusAzmi Bin A MataliNo ratings yet
- CIE-305-Topic8 - Root LocusDocument38 pagesCIE-305-Topic8 - Root LocusSanjay KansalNo ratings yet
- Chapter 6 Stability of Linear Control Systems: 6-1 (A) (B) (C) (D) (E) (F)Document13 pagesChapter 6 Stability of Linear Control Systems: 6-1 (A) (B) (C) (D) (E) (F)Enzo CraviottoNo ratings yet
- Answers LU4 PDFDocument4 pagesAnswers LU4 PDFJEFT MOKWENANo ratings yet
- Root LocusDocument18 pagesRoot LocusgigoNo ratings yet
- Root LocusDocument44 pagesRoot LocusDheer MehrotraNo ratings yet
- Control System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Document49 pagesControl System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Junaidy VandeanganNo ratings yet
- EMS507 Lecture 3 - System StabilityDocument21 pagesEMS507 Lecture 3 - System Stability124ll124No ratings yet
- Chapter 6Document39 pagesChapter 6Mohamed KhalidNo ratings yet
- Tutorial D2 2 Solutions2020Document5 pagesTutorial D2 2 Solutions2020ivancxyew13No ratings yet
- Chapter 3 - Synthesis of Analog CircuitsDocument27 pagesChapter 3 - Synthesis of Analog CircuitsMahmoud DoughanNo ratings yet
- Analysis of Mechanism of Dew Point Measurement Using A Colpitts Oscillation CircuitDocument6 pagesAnalysis of Mechanism of Dew Point Measurement Using A Colpitts Oscillation Circuitmanish53970No ratings yet
- 1D Spring Systems Finite Element AnalysisDocument8 pages1D Spring Systems Finite Element AnalysisThahir ShahNo ratings yet
- Root Locus Diagram: Upon Completion of This Chapter You Will Be Able ToDocument24 pagesRoot Locus Diagram: Upon Completion of This Chapter You Will Be Able ToGnanendraReddyNo ratings yet
- EE301 PracticeQuestions2 2022Document6 pagesEE301 PracticeQuestions2 2022SonuNo ratings yet
- F44128640 Homework 2 LCS DING JoelDocument16 pagesF44128640 Homework 2 LCS DING JoelNotnowNo ratings yet
- Chapter 11 Chang.2Document39 pagesChapter 11 Chang.2satya sagarNo ratings yet
- Root LocusDocument114 pagesRoot LocusSwapneel NaphadeNo ratings yet
- 55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaDocument36 pages55-700843 Control of Linear Systems: Lecture 2: Dynamic System Responses, & Time Domain Performance CriteriaSandeep K AugustineNo ratings yet
- Week 8Document35 pagesWeek 8usmanshah1998.usNo ratings yet
- Gyrostellar EstimationDocument6 pagesGyrostellar EstimationMarcAlomarPayerasNo ratings yet
- Kronig PenneyDocument25 pagesKronig PenneyAbel Tom100% (1)
- Control Systems Engineering D227 Solutions Q 2003: 8) 3) (S S (S K G (Ol) + +Document2 pagesControl Systems Engineering D227 Solutions Q 2003: 8) 3) (S S (S K G (Ol) + +Chintu GurbaniNo ratings yet
- Assignment 3Document3 pagesAssignment 3sethyashis456No ratings yet
- Root Locus Method 2Document33 pagesRoot Locus Method 2Patel DipenNo ratings yet
- Determination of Electrode PotentialsDocument26 pagesDetermination of Electrode PotentialsGliezl ImperialNo ratings yet
- Test Models For Statistical Inference: Two-Dimensional Reaction Systems Displaying Limit Cycle Bifurcations and BistabilityDocument21 pagesTest Models For Statistical Inference: Two-Dimensional Reaction Systems Displaying Limit Cycle Bifurcations and BistabilityStatistics Office MakwanpurNo ratings yet
- 1437235816control Systems (K-Wiki Root Locus) PDFDocument24 pages1437235816control Systems (K-Wiki Root Locus) PDFRitarshiChakrabortyNo ratings yet
- 1631 Topic11Document10 pages1631 Topic11Mauricio Sanchez PortillaNo ratings yet
- MIT16 06F12 Lecture 13 PDFDocument6 pagesMIT16 06F12 Lecture 13 PDFPhuoc HoNo ratings yet
- Solutions ComparingDocument3 pagesSolutions ComparingHusain BaradNo ratings yet
- Root LocusDocument43 pagesRoot LocusSanthosh SNo ratings yet
- A Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersDocument12 pagesA Triggered Monostable Blocking Oscillator: Used in Legacy Channel RepeatersmcamhkNo ratings yet
- Colorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M PDocument6 pagesColorado School of Mines CHEN403 Ziegler-Nichols Example: M Is The Amplitude Ratio. K M Parpit gargNo ratings yet
- Ziegler-Nichols Controller Tuning ExampleDocument6 pagesZiegler-Nichols Controller Tuning ExampleChristine AvdikouNo ratings yet
- t7 PDFDocument13 pagest7 PDFKj_bdNo ratings yet
- Unit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems IDocument6 pagesUnit 7: Part 3: Positive Feedback: Engineering 5821: Control Systems INikhil PanikkarNo ratings yet
- Control SystemsDocument94 pagesControl SystemsVaibhav DangeNo ratings yet
- CH 06Document13 pagesCH 06HKVMVPVPV021511No ratings yet
- Chapter 6Document25 pagesChapter 6chalaNo ratings yet
- 51 - 0 - 15 - Solutions Unit III Assignment IIDocument54 pages51 - 0 - 15 - Solutions Unit III Assignment IIGapitoNo ratings yet
- PID ControllerDocument32 pagesPID ControllerjosemiguelvillafuerteNo ratings yet
- Time ResponseDocument14 pagesTime ResponseRilwanNo ratings yet
- Matter Waves: PH 333: Quantum PhysicsDocument22 pagesMatter Waves: PH 333: Quantum PhysicsAntonio BernardoNo ratings yet
- Falsified Kinetics:: K C C KCDocument3 pagesFalsified Kinetics:: K C C KCedelmandalaNo ratings yet
- Problem PR02.1Document22 pagesProblem PR02.1AliNo ratings yet
- Colorado School of Mines CHEN403: Ziegler-Nichols Controller Tuning ExampleDocument6 pagesColorado School of Mines CHEN403: Ziegler-Nichols Controller Tuning ExamplefalconalnajjarNo ratings yet
- Kriging: Reservoir Modeling With GSLIBDocument16 pagesKriging: Reservoir Modeling With GSLIBAhmad GuskarnaliNo ratings yet
- Lecture - 12 - Stabiity Analysis TechniquesDocument80 pagesLecture - 12 - Stabiity Analysis TechniquesAbdelrhman AbdullahNo ratings yet
- Lecture 8 Steady State ErrorDocument22 pagesLecture 8 Steady State ErrorMannuel Ignacio MatillanoNo ratings yet
- Control System 2 (Cont of 1)Document13 pagesControl System 2 (Cont of 1)K.Magenthran (UTHM)No ratings yet
- Numerical Methods For EngineersDocument17 pagesNumerical Methods For EngineersMahir MahmoodNo ratings yet
- Replaced Fall 2010 Course Outline For Engineering 36 Engineering Mechanics - Statics Catalog DescriptionDocument5 pagesReplaced Fall 2010 Course Outline For Engineering 36 Engineering Mechanics - Statics Catalog DescriptionMahir MahmoodNo ratings yet
- Statics: ENGR 01.271 - Fall 2006 Section Place Meeting Times Instructor Office HoursDocument2 pagesStatics: ENGR 01.271 - Fall 2006 Section Place Meeting Times Instructor Office HoursMahir MahmoodNo ratings yet
- Are The Reactions at C in The Two Cases?: Problem 5.49 The Tension in Cable AB Is 2 Kn. WhatDocument5 pagesAre The Reactions at C in The Two Cases?: Problem 5.49 The Tension in Cable AB Is 2 Kn. WhatMahir MahmoodNo ratings yet
- Prerequisite:: The Ability To Determine Forces and Stresses in Elementary Structural SystemsDocument5 pagesPrerequisite:: The Ability To Determine Forces and Stresses in Elementary Structural SystemsMahir MahmoodNo ratings yet
- Centroids.: Problem 7.29 Determine The Coordinates of The SolutionDocument3 pagesCentroids.: Problem 7.29 Determine The Coordinates of The SolutionMahir MahmoodNo ratings yet
- HW 1Document1 pageHW 1Mahir MahmoodNo ratings yet
- Kirch Off Appendix BDocument9 pagesKirch Off Appendix BMahir MahmoodNo ratings yet
- 14 Thermal Lab 2009Document7 pages14 Thermal Lab 2009Mahir MahmoodNo ratings yet
- Creating Detail Drawings: BackgroundDocument3 pagesCreating Detail Drawings: BackgroundMahir MahmoodNo ratings yet
- ADDII 1 Electrical Symbols SheetDocument1 pageADDII 1 Electrical Symbols SheetMahir MahmoodNo ratings yet
- 24-361 Intermediate Stress Analysis Project #1: Part I: Due Thursday February 5Document3 pages24-361 Intermediate Stress Analysis Project #1: Part I: Due Thursday February 5Mahir MahmoodNo ratings yet
- ANSYS Resources06Document2 pagesANSYS Resources06Mahir MahmoodNo ratings yet
- Vector SpacesDocument20 pagesVector SpacesValentio100% (1)
- Mathematics Arithmetic and Number Sense Algebra Geometry: (Answer Many Word Problems As Possible)Document5 pagesMathematics Arithmetic and Number Sense Algebra Geometry: (Answer Many Word Problems As Possible)DarleneNo ratings yet
- Complete: MathematicsDocument21 pagesComplete: Mathematicsarcanum780% (1)
- Instabilities: 5.1 Kelvin-Helmholtz InstabilityDocument24 pagesInstabilities: 5.1 Kelvin-Helmholtz Instabilityca6tik01No ratings yet
- 1st - & - 2nd - Sem - Diploma SyllabusDocument50 pages1st - & - 2nd - Sem - Diploma Syllabusvj4249No ratings yet
- College and Advanced AlgebraDocument11 pagesCollege and Advanced AlgebraCRING TVNo ratings yet
- Quaternion ConradDocument19 pagesQuaternion ConradWalter ariel BayaNo ratings yet
- BTech Mechanical Engineering SyllabusDocument190 pagesBTech Mechanical Engineering Syllabusprasaad7No ratings yet
- Std12 Maths EM 1 WWW - Governmentexams.co - inDocument297 pagesStd12 Maths EM 1 WWW - Governmentexams.co - inSarathyNo ratings yet
- 12th Maths Volume1 PDFDocument304 pages12th Maths Volume1 PDFrama krishna67% (3)
- Fourier Series and Fourier TransformsDocument13 pagesFourier Series and Fourier TransformsbjayachanderraoNo ratings yet
- Annex1 Module Handbook-PEDocument128 pagesAnnex1 Module Handbook-PEAmelSiljo2No ratings yet
- Anti-Swing Control of The Pendubot Using Damper and Spring With Positive or Negative StiffnessDocument20 pagesAnti-Swing Control of The Pendubot Using Damper and Spring With Positive or Negative StiffnessAbdullah ÇakanNo ratings yet
- Curs Analiza MatematicaDocument407 pagesCurs Analiza MatematicaIra LoghinNo ratings yet
- Trigonometry HandbookDocument60 pagesTrigonometry HandbookJayakumar SankaranNo ratings yet
- BLL ExportDocument372 pagesBLL Exportpnmawade123No ratings yet
- Sanchez 07 Poles and Zeros of Transfer FunctionsDocument20 pagesSanchez 07 Poles and Zeros of Transfer FunctionsYasmin KayeNo ratings yet
- Complex Analysis - George Cain (Title Page and Table of Contents)Document3 pagesComplex Analysis - George Cain (Title Page and Table of Contents)Roberto Armenta100% (1)
- Jee SylabusDocument9 pagesJee SylabusmishrajishreyanshpratapNo ratings yet
- More Than 5000 Questions Dr. BL Sharma Mathematics PageDocument4 pagesMore Than 5000 Questions Dr. BL Sharma Mathematics Pagerskr_tNo ratings yet
- Influence of ACSR Steel Core Permeability On Entire Conductor's Load ParametersDocument4 pagesInfluence of ACSR Steel Core Permeability On Entire Conductor's Load ParametersMustafa JobehNo ratings yet
- Construction Economics B-Assignment 01Document9 pagesConstruction Economics B-Assignment 01swarnapuraNo ratings yet
- 17.4.2 - Homogeneous Equations With Constant Coefficients Higher OrderDocument14 pages17.4.2 - Homogeneous Equations With Constant Coefficients Higher Orderanon_422073337100% (1)
- Circuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling PDFDocument618 pagesCircuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling PDFOscar Iñaky Hernández HernándezNo ratings yet
- Imaginary Mathematics For Computer Science (John Vince) (Z-Library)Document309 pagesImaginary Mathematics For Computer Science (John Vince) (Z-Library)sbwjlvnbsNo ratings yet
- REVISED (Maths) - INC JR IIT CO SPARK - TEACHING SCHEDULE& QP ALLOTMENT - 2022-23 (CODE - GREEN-3) @030-08-2022Document11 pagesREVISED (Maths) - INC JR IIT CO SPARK - TEACHING SCHEDULE& QP ALLOTMENT - 2022-23 (CODE - GREEN-3) @030-08-2022VamshiNo ratings yet
- Mathematics of Physics and Engineering PDFDocument498 pagesMathematics of Physics and Engineering PDFRohmani100% (2)
- Proposed Inc JR Iit Co Super Chaina & Super Chaina N120& N120 - Micro Schedule - 2022-23 (Code - Ashadam Bonalu)Document31 pagesProposed Inc JR Iit Co Super Chaina & Super Chaina N120& N120 - Micro Schedule - 2022-23 (Code - Ashadam Bonalu)Chakresh techNo ratings yet
- Birla Institute of Technology and Science, Pilani Pilani Campus AUGS/ AGSR DivisionDocument4 pagesBirla Institute of Technology and Science, Pilani Pilani Campus AUGS/ AGSR DivisionPriyam VermaNo ratings yet