Download as ppt, pdf, or txt
You might also like
- HF TRC3700Document12 pagesHF TRC3700nazilah ismail100% (2)
- Thanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayDocument46 pagesThanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayGaurav Sharma0% (1)
- Gesture Controlled RobotDocument36 pagesGesture Controlled RobotTeena Sharma44% (9)
- Hand Gesture Based Wireless Controlled RobotDocument26 pagesHand Gesture Based Wireless Controlled RobotkaushiktikuNo ratings yet
- Accelerometer Based Gesture RobotDocument3 pagesAccelerometer Based Gesture RobotPirate MayurNo ratings yet
- Presented By: Group No:8Document16 pagesPresented By: Group No:8Priyanka TrivediNo ratings yet
- Human Detection Robot DetailsDocument6 pagesHuman Detection Robot DetailschirayilrichardNo ratings yet
- Fully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GateDocument21 pagesFully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GatePraveen Kumar PrajapatiNo ratings yet
- RF Controlled Spy Robot With Night Vision CameraDocument7 pagesRF Controlled Spy Robot With Night Vision CameraNikhil GaidhaneNo ratings yet
- S.D.M. College of Engineering & Technology, Dharwad - 580 002Document8 pagesS.D.M. College of Engineering & Technology, Dharwad - 580 002Kumar NeerajNo ratings yet
- Unique Id Based Smart Car Parking System: Mrs - RevathiDocument32 pagesUnique Id Based Smart Car Parking System: Mrs - Revathikuppala dineshNo ratings yet
- Rfid Based Toll Collection System: Project Report ONDocument80 pagesRfid Based Toll Collection System: Project Report ONGopi RamNo ratings yet
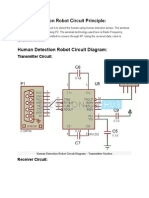
- Human Detection Robot Circuit PrincipleDocument4 pagesHuman Detection Robot Circuit PrincipleAli KhanNo ratings yet
- Abs On RemoteDocument7 pagesAbs On RemoteRajkumar RNo ratings yet
- A Project Report On: RF Id Access Control SystemDocument16 pagesA Project Report On: RF Id Access Control Systemharshraj086No ratings yet
- GSM Based Production Counting Using MicrocontrollerDocument7 pagesGSM Based Production Counting Using MicrocontrollerUma ShankarNo ratings yet
- Head Movemet RobotDocument4 pagesHead Movemet RobotVenu Gopal Reddy BonthaNo ratings yet
- Low Power Vlsi Circuits and Systems - Ajit PalDocument26 pagesLow Power Vlsi Circuits and Systems - Ajit PalAnushaNo ratings yet
- Smart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatDocument8 pagesSmart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatE-zat IlmanNo ratings yet
- Employee Log System Using Pc&RfidDocument3 pagesEmployee Log System Using Pc&RfidThanniru VenkateshNo ratings yet
- Smart GloveDocument8 pagesSmart GloveRakshit VigNo ratings yet
- Fully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GateDocument13 pagesFully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GateHimanshu SharmaNo ratings yet
- Alive Human Detector: Project By, Nayana.K.R Sheefa Shah K.Shifa Sulthana Swetha.N.Murthy Guided By, Yatish.N.SDocument35 pagesAlive Human Detector: Project By, Nayana.K.R Sheefa Shah K.Shifa Sulthana Swetha.N.Murthy Guided By, Yatish.N.SSushma NageshNo ratings yet
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyDocument13 pagesFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaNo ratings yet
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyDocument13 pagesFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaNo ratings yet
- Accelerometer Based Gesture RobotDocument3 pagesAccelerometer Based Gesture RobotjaiNo ratings yet
- Project Construction: 3.1 HC-05 Bluetooth To Serial Port ModuleDocument8 pagesProject Construction: 3.1 HC-05 Bluetooth To Serial Port Moduleanugya sharmaNo ratings yet
- Elite Project Report: Gesture Controlled RobotDocument17 pagesElite Project Report: Gesture Controlled RobotMallika 19No ratings yet
- Accelerometer Gesture Controlled Robot Using ARDUINODocument7 pagesAccelerometer Gesture Controlled Robot Using ARDUINOmy computerNo ratings yet
- Wireless Multi Axis ROBOT For Multi-Purpose OperationsDocument5 pagesWireless Multi Axis ROBOT For Multi-Purpose OperationsseventhsensegroupNo ratings yet
- By: Voora Raviteja Kusuma Bharath M Vinod Amruth RajDocument20 pagesBy: Voora Raviteja Kusuma Bharath M Vinod Amruth RajravitejavooraNo ratings yet
- Intelligent Traffic Light ControllerTTTDocument5 pagesIntelligent Traffic Light ControllerTTTshitalNo ratings yet
- Design and Implementation of Intelligent Lawn Mower RobotDocument4 pagesDesign and Implementation of Intelligent Lawn Mower RobotJûֆtíñéNo ratings yet
- Submitted To: Submitted byDocument13 pagesSubmitted To: Submitted byajayNo ratings yet
- Chap 1Document92 pagesChap 1Arth PatelNo ratings yet
- Hand Motion Controlled Robotic ArmDocument5 pagesHand Motion Controlled Robotic ArmRameshkumar JayaramanNo ratings yet
- ECE1Document11 pagesECE1Hermogenes L. Jr MejiaNo ratings yet
- Fully Automated Toll Tax Collection Using RF TechnologyDocument6 pagesFully Automated Toll Tax Collection Using RF Technologyaagrawal_48No ratings yet
- Bachelor of Technology: IN Electronics and Communication EngineeringDocument19 pagesBachelor of Technology: IN Electronics and Communication EngineeringLovepreet kaurNo ratings yet
- Irjet V4i4783 PDFDocument3 pagesIrjet V4i4783 PDFBipin S CNo ratings yet
- RFID Based Car Parking SystemDocument27 pagesRFID Based Car Parking SystemKrishna Kant Sashi100% (3)
- 60.radio Frequency Based Industrial Wireless CNTRL SystemDocument4 pages60.radio Frequency Based Industrial Wireless CNTRL SystemKamlesh MotghareNo ratings yet
- Research Proposal (Plaza)Document10 pagesResearch Proposal (Plaza)Edmarjan ConcepcionNo ratings yet
- Microcontroller Based Missile Detection and Destroying 8154 Rv8KK7qDocument21 pagesMicrocontroller Based Missile Detection and Destroying 8154 Rv8KK7qThor OdinsonNo ratings yet
- An Intelligent Mobile Robot Navigation Technique Using RF TechnologyDocument6 pagesAn Intelligent Mobile Robot Navigation Technique Using RF TechnologyJDNET TECHNOLOGIESNo ratings yet
- Iot Based Sanitizing Robotic CarDocument4 pagesIot Based Sanitizing Robotic Carvivekanand_bonalNo ratings yet
- It Presentation: On Embedded in 8051Document30 pagesIt Presentation: On Embedded in 8051Sidharth GuptaNo ratings yet
- Android Application Controlled Remote Robot Operation: Under The Guidance ofDocument36 pagesAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineNo ratings yet
- Gesture Control Car Using Arduino LilypadDocument17 pagesGesture Control Car Using Arduino LilypadMohammed KhaleelullahNo ratings yet
- Robotic Bomb Detection and DiffusionDocument5 pagesRobotic Bomb Detection and DiffusionBrightchip TechnologiesNo ratings yet
- Embedded Systems and RoboticsDocument34 pagesEmbedded Systems and RoboticsSri Syama KasyapaNo ratings yet
- GSM Controlled RobotDocument33 pagesGSM Controlled RobotAbhishek KunalNo ratings yet
- RF Robot PrateekDocument3 pagesRF Robot PrateekPrateek PrakashNo ratings yet
- Remote Control Operated Spy Robot Circuit - Block DiagramDocument7 pagesRemote Control Operated Spy Robot Circuit - Block Diagramanon_802118071No ratings yet
- Live Human Detecting Robot For Earthquake Rescue OperationDocument5 pagesLive Human Detecting Robot For Earthquake Rescue OperationIntegrated Intelligent Research100% (1)
- Software Defined RadioDocument18 pagesSoftware Defined RadioRegine OmboyNo ratings yet
- 30.IJAEST Vol No 7 Issue No 2 An Intelligent Mobile Robot Navigation Technique Using RFID Technology 356 364Document10 pages30.IJAEST Vol No 7 Issue No 2 An Intelligent Mobile Robot Navigation Technique Using RFID Technology 356 364helpdesk9532No ratings yet
- DocumentDocument107 pagesDocumentdileeppatraNo ratings yet
- For 4Document5 pagesFor 4Neelay BeraNo ratings yet
- Wirelessly Powered Data Aggregation For IoT Via Over-The-Air Function Computation Beamforming and Power ControlDocument16 pagesWirelessly Powered Data Aggregation For IoT Via Over-The-Air Function Computation Beamforming and Power ControlVi VuVoNo ratings yet
- Radar Systems AnalasysDocument4 pagesRadar Systems AnalasysPoduguManikantaNo ratings yet
- Amb4519R3V06 2Mxx-790-960/1710-2200-33/33-16I/18.5I-M/M-R Easyret Hybrid Quad-Beam Antenna With 4 Integrated Rcus - 2.0MDocument3 pagesAmb4519R3V06 2Mxx-790-960/1710-2200-33/33-16I/18.5I-M/M-R Easyret Hybrid Quad-Beam Antenna With 4 Integrated Rcus - 2.0MNurlanNo ratings yet
- CommunicationsDocument4 pagesCommunicationsJOVIN SAN ANDRESNo ratings yet
- Radio Propagation DefinitionDocument5 pagesRadio Propagation DefinitionAnonymous Th1S33No ratings yet
- Physical LAyer 36.213Document462 pagesPhysical LAyer 36.213Arun PeelwalNo ratings yet
- Wap-3101 Um V1.0 PDFDocument34 pagesWap-3101 Um V1.0 PDFhtweakNo ratings yet
- A Bis CalculationDocument5 pagesA Bis CalculationMoncef ManaiNo ratings yet
- Microwave Communication & Wave GuidesDocument46 pagesMicrowave Communication & Wave GuidesMahmoud DoughanNo ratings yet
- Cell Country CodesDocument29 pagesCell Country CodesYusha PatelNo ratings yet
- ANT ASI4518R33v06 2954 DatasheetDocument3 pagesANT ASI4518R33v06 2954 DatasheetCarlos AlvarezNo ratings yet
- ASK Modulation and Demodulation Technique Using Functions in MATLABDocument4 pagesASK Modulation and Demodulation Technique Using Functions in MATLABdes tosNo ratings yet
- 3GPP TR 38.804Document56 pages3GPP TR 38.804Eduardo MartinezNo ratings yet
- File 1206Document41 pagesFile 1206decyber.feedbackNo ratings yet
- Module 1 - Fundamentals of Microwave CommunicationsDocument224 pagesModule 1 - Fundamentals of Microwave CommunicationslornfateNo ratings yet
- ANT-2x2-2005H Install Guide PDFDocument1 pageANT-2x2-2005H Install Guide PDFWahyu BudimanNo ratings yet
- Toshiba Inverter Software ASD Pro Operation ManualDocument66 pagesToshiba Inverter Software ASD Pro Operation ManualjaseemNo ratings yet
- FSO - Seminar 2009Document21 pagesFSO - Seminar 2009Naveen KrishnanNo ratings yet
- Norsat 1000xu - LNBDocument1 pageNorsat 1000xu - LNBhunglangNo ratings yet
- CS-541 Wireless Sensor Networks: Spring Semester 2016-2017Document35 pagesCS-541 Wireless Sensor Networks: Spring Semester 2016-2017Kumar SarthakNo ratings yet
- Design and Implementation Ofdm Transmitter and ReceiverDocument54 pagesDesign and Implementation Ofdm Transmitter and Receiverمصطفى محمد عيد سلامة100% (1)
- TH-9800 - RF Test ReportDocument43 pagesTH-9800 - RF Test ReportBenjamin DoverNo ratings yet
- Kenwood TK-D240 D340Document2 pagesKenwood TK-D240 D340Dyego FelixNo ratings yet
- CS7222310 V1005Document1 pageCS7222310 V1005Makhful AdhimNo ratings yet
- Huawei BTS-3012AE - V300R005. Product DescriptionDocument42 pagesHuawei BTS-3012AE - V300R005. Product DescriptionStephen Gooberman-Hill100% (1)
- FM Transmitter by YewlsewDocument50 pagesFM Transmitter by Yewlsewyewlsewmekonen75% (8)
- What Is IUBDocument17 pagesWhat Is IUBtuyambaze jean claudeNo ratings yet
- AntenaaDocument1 pageAntenaahamza qayyumNo ratings yet
- Solid Alliance Multi-Operator DasDocument3 pagesSolid Alliance Multi-Operator DasDiego ZABALANo ratings yet