Download as ppt, pdf, or txt
You might also like
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- Quiz-6 Answers and Solutions: Coursera. Stochastic Processes December 30, 2020Document4 pagesQuiz-6 Answers and Solutions: Coursera. Stochastic Processes December 30, 2020sirj0_hnNo ratings yet
- Box Jenkins MethodologyDocument29 pagesBox Jenkins MethodologySylvia Cheung100% (1)
- Univariate Time Series Modelling and ForecastingDocument72 pagesUnivariate Time Series Modelling and Forecastingjamesburden100% (2)
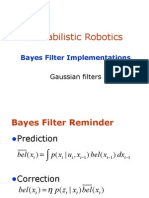
- Probabilistic Robotics: Bayes Filter ImplementationsDocument61 pagesProbabilistic Robotics: Bayes Filter ImplementationsShaik MasthanNo ratings yet
- Stationarity, Non Stationarity, Unit Roots and Spurious RegressionDocument26 pagesStationarity, Non Stationarity, Unit Roots and Spurious RegressionNuur AhmedNo ratings yet
- Chapter 4. ARIMA - SVDocument49 pagesChapter 4. ARIMA - SVthucnhi.2003hnntNo ratings yet
- S To Chas Tic ProcessesDocument16 pagesS To Chas Tic ProcessesSeham RaheelNo ratings yet
- ARIMA AR MA ARMA ModelsDocument46 pagesARIMA AR MA ARMA ModelsOisín Ó CionaoithNo ratings yet
- Rekayasa SistemDocument165 pagesRekayasa SistemEres Putra WardhoyoNo ratings yet
- Kalman SmoothingDocument15 pagesKalman SmoothingMarisela BarnesNo ratings yet
- Chap 1 Preliminary Concepts: Nkim@ufl - EduDocument20 pagesChap 1 Preliminary Concepts: Nkim@ufl - Edudozio100% (1)
- Ec2 4Document40 pagesEc2 4masudul9islamNo ratings yet
- A Sliding Mode Control For Robot ManipulatorDocument27 pagesA Sliding Mode Control For Robot ManipulatorauraliusNo ratings yet
- Ch6 Slides Ed3 Feb2021Document63 pagesCh6 Slides Ed3 Feb2021Phuc Hong PhamNo ratings yet
- VAR Models: Gloria González-RiveraDocument32 pagesVAR Models: Gloria González-RiveraVinko ZaninovićNo ratings yet
- Frequency Response AnalysisDocument33 pagesFrequency Response AnalysisShiraz HusainNo ratings yet
- Exam ReviewDocument13 pagesExam ReviewSk A S M Monirul IslamNo ratings yet
- Introduction To ROBOTICS: OutlineDocument7 pagesIntroduction To ROBOTICS: OutlineshaheerdurraniNo ratings yet
- Communication IITN Review1Document28 pagesCommunication IITN Review1Pankaj MeenaNo ratings yet
- Unit 6: 1. Explain The Classification of Random Process With Neat Sketches. AnsDocument12 pagesUnit 6: 1. Explain The Classification of Random Process With Neat Sketches. Anssrinivas0% (1)
- A Comparison Study of The Numerical Integration Methods in The Trajectory Tracking Application of Redundant Robot ManipulatorsDocument21 pagesA Comparison Study of The Numerical Integration Methods in The Trajectory Tracking Application of Redundant Robot ManipulatorsEmre SarıyıldızNo ratings yet
- Ufabccapitulo 1Document121 pagesUfabccapitulo 1Leonardo De Avellar FredericoNo ratings yet
- Stationary Random ProcessesDocument62 pagesStationary Random ProcessesGramoz CubreliNo ratings yet
- Dynamic Characteristics: Input Signal X (T) Output Signal y (T)Document29 pagesDynamic Characteristics: Input Signal X (T) Output Signal y (T)veenadivyakishNo ratings yet
- MAE 152 Computer Graphics For Scientists and Engineers: Splines and Bezier CurvesDocument76 pagesMAE 152 Computer Graphics For Scientists and Engineers: Splines and Bezier CurvesPrateek ChakrabortyNo ratings yet
- Sinusoidal Response.: S A S XDocument15 pagesSinusoidal Response.: S A S XManidhar ThulaNo ratings yet
- Vector Controlled Reluctance Synchronous Motor Drives With Prescribed Closed-Loop Speed DynamicsDocument16 pagesVector Controlled Reluctance Synchronous Motor Drives With Prescribed Closed-Loop Speed DynamicsNguyễn Đức QuậnNo ratings yet
- I. Concepts and Tools: Mathematics For Dynamic SystemsDocument48 pagesI. Concepts and Tools: Mathematics For Dynamic SystemsRaveendhra IitrNo ratings yet
- Discrete-Time Signals and SystemsDocument111 pagesDiscrete-Time Signals and Systemsduraivel_anNo ratings yet
- Lecture 4 First Order Systems: AME 455 Control Systems DesignDocument22 pagesLecture 4 First Order Systems: AME 455 Control Systems DesignJason ChiangNo ratings yet
- Discrete Random Variables and Probability DistributionsDocument36 pagesDiscrete Random Variables and Probability DistributionskashishnagpalNo ratings yet
- Discrete-Time Signals and SystemsDocument111 pagesDiscrete-Time Signals and SystemsharivarahiNo ratings yet
- Stationary Time SeriesDocument21 pagesStationary Time SeriesJay AydinNo ratings yet
- Probabilistic Robotics: Bayes Filter ImplementationsDocument61 pagesProbabilistic Robotics: Bayes Filter ImplementationsMatt Brian CapangpanganNo ratings yet
- Response Spectrum Analysis PDFDocument30 pagesResponse Spectrum Analysis PDFSujay Santra100% (1)
- Stochastic Process - IntroductionDocument16 pagesStochastic Process - IntroductionRajesh BathijaNo ratings yet
- Random Processes: 3.1 (A) The Mean and Autocorrelation Functions ofDocument21 pagesRandom Processes: 3.1 (A) The Mean and Autocorrelation Functions ofSudipta GhoshNo ratings yet
- Ee602 Fourier SeriesDocument110 pagesEe602 Fourier SeriesArryshah DahmiaNo ratings yet
- 365 Spectrum AnalysisDocument19 pages365 Spectrum AnalysisSunilkumar ReddyNo ratings yet
- Signals and Systems FormulasDocument3 pagesSignals and Systems FormulasKPRBTNo ratings yet
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanNo ratings yet
- L2 - Modelling SystemsDocument21 pagesL2 - Modelling SystemsOmer AhmedNo ratings yet
- Time Series Basics: Fin250f: Lecture 8.1 Spring 2010 Reading: Brooks, Chapter 5.1-5.7Document44 pagesTime Series Basics: Fin250f: Lecture 8.1 Spring 2010 Reading: Brooks, Chapter 5.1-5.7Philip SempleNo ratings yet
- Lecture - 4 Box-Jenkins ModelDocument16 pagesLecture - 4 Box-Jenkins ModelNuur Ahmed100% (1)
- Hidden Markov Models: Adapted FromDocument27 pagesHidden Markov Models: Adapted FromAkash Singh BadalNo ratings yet
- Chapter 3 Modeling of Physical SystemsDocument29 pagesChapter 3 Modeling of Physical Systemssaleh1978No ratings yet
- Control Lecture 8 Poles Performance and StabilityDocument20 pagesControl Lecture 8 Poles Performance and StabilitySabine Brosch100% (1)
- EM Algorithm: Jur Van Den BergDocument23 pagesEM Algorithm: Jur Van Den BergChandramauli ChaudhuriNo ratings yet
- Technical Note - Autoregressive ModelDocument12 pagesTechnical Note - Autoregressive ModelNumXL ProNo ratings yet
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDocument120 pagesProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNo ratings yet
- Chapter 02 PDFDocument73 pagesChapter 02 PDFnasim dashkhaneNo ratings yet
- TSNotes 2Document28 pagesTSNotes 2YANGYUXINNo ratings yet
- ECTE301 Notes Week1Document52 pagesECTE301 Notes Week1sreddybabuNo ratings yet
- Harmonics in Power Systems and Electrical Power Quality: Abcdefghij KLDocument57 pagesHarmonics in Power Systems and Electrical Power Quality: Abcdefghij KLFatih GürdalNo ratings yet
- Elementary Tutorial: Fundamentals of Linear VibrationsDocument51 pagesElementary Tutorial: Fundamentals of Linear VibrationsfujinyuanNo ratings yet
- Frequency ResponseDocument9 pagesFrequency ResponseAnanda RamanNo ratings yet
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
- Some Examples of Non-Stationary Time Series:: Model ACF PacfDocument12 pagesSome Examples of Non-Stationary Time Series:: Model ACF PacfTanmay MaityNo ratings yet
- MIT18 445S15 Lecture13Document6 pagesMIT18 445S15 Lecture13JOSE MIGUEL RIVERA HUINCHONo ratings yet
- EE531 Homework-6 Fall 2013Document1 pageEE531 Homework-6 Fall 2013Ufuk TamerNo ratings yet
- 18.S096 Problem Set Fall 2013: Stochastic CalculusDocument3 pages18.S096 Problem Set Fall 2013: Stochastic CalculusGagik AtabekyanNo ratings yet
- Tabel. Durbin WatsonDocument112 pagesTabel. Durbin WatsonmynemelasiaNo ratings yet
- Cadenas de MarkovDocument53 pagesCadenas de MarkovolsolerNo ratings yet
- Time Series by Oscar Torres-ReynaDocument31 pagesTime Series by Oscar Torres-ReynaDacian BalosinNo ratings yet
- NLP Assignment 5Document5 pagesNLP Assignment 5poorvaja.rNo ratings yet
- Final Paul BourgadeDocument2 pagesFinal Paul BourgadeaqszaqszNo ratings yet
- Stochastic Calculus For Jump Processes: 14.1 The Poisson ProcessDocument28 pagesStochastic Calculus For Jump Processes: 14.1 The Poisson ProcesskodaiNo ratings yet
- Act. StatDocument10 pagesAct. StatGA RICAFRENTE67% (3)
- Brownian Motion and Itô Calculus: 8.1 Definition, Construction and PropertiesDocument12 pagesBrownian Motion and Itô Calculus: 8.1 Definition, Construction and PropertiesArturo ZamudioNo ratings yet
- Full Download Solutions Manual To Accompany Stochastic Calculus For Finance I 9780387249681 PDF Full ChapterDocument34 pagesFull Download Solutions Manual To Accompany Stochastic Calculus For Finance I 9780387249681 PDF Full Chapterbriber.soordus2a4j100% (19)
- Gardiner - Stochastic MeethodsDocument10 pagesGardiner - Stochastic MeethodsganjeyNo ratings yet
- Linear Congruential Generator For Pseudo-Random Number Generation With RDocument5 pagesLinear Congruential Generator For Pseudo-Random Number Generation With RMarcos MarcosNo ratings yet
- Stochastic Processes: - Poisson and Renewal ProcessesDocument34 pagesStochastic Processes: - Poisson and Renewal Processes1005836110No ratings yet
- LBSEconometricsPartIIpdf Time SeriesDocument246 pagesLBSEconometricsPartIIpdf Time SeriesZoloft Zithromax ProzacNo ratings yet
- List of Measuring Instruments - MasterDocument12 pagesList of Measuring Instruments - MasterMadhu Mohan BNo ratings yet
- Grades CV 2016Document14 pagesGrades CV 2016vothiquynhyenNo ratings yet
- Ch22 Time Series Econometrics - ForecastingDocument38 pagesCh22 Time Series Econometrics - ForecastingKhirstina CurryNo ratings yet
- Aplikasi Metode Golden Section Untuk Optimasi Parameter Pada Metode Exponential SmoothingDocument10 pagesAplikasi Metode Golden Section Untuk Optimasi Parameter Pada Metode Exponential SmoothingHerlinaNo ratings yet
- MA1254 Random Processes :: Unit 4 :: Classification of Random ProcessesDocument3 pagesMA1254 Random Processes :: Unit 4 :: Classification of Random Processesjeyaganesh100% (1)
- Ito StratonovichDocument18 pagesIto StratonovichGoce AngelovskiNo ratings yet
- Analytical Simulation of Water System Capacity ReliabilityDocument14 pagesAnalytical Simulation of Water System Capacity ReliabilityJoel AlvesNo ratings yet
- BranchingDocument27 pagesBranchingDANISH ELCHINo ratings yet
- Adobe Scan 09 Dec 2021Document2 pagesAdobe Scan 09 Dec 2021RAJKUMAR CHATTERJEE. (RAJA.)No ratings yet
- Final Exam, Stochastic Processes: Hai Le, ID: 998010705Document2 pagesFinal Exam, Stochastic Processes: Hai Le, ID: 998010705Hai LeNo ratings yet
- Chap 6Document40 pagesChap 6pranjal meshramNo ratings yet
- Probability & Random Process Formulas All UnitsDocument10 pagesProbability & Random Process Formulas All UnitsSijilNo ratings yet