Download as ppt, pdf, or txt
You might also like
- Trends1 Aio Ut1-L1Document2 pagesTrends1 Aio Ut1-L1Yolanda Csp77% (13)
- Bugera V55-Schematic PDFDocument1 pageBugera V55-Schematic PDFzogivaNo ratings yet
- Moct Seminar ReportDocument20 pagesMoct Seminar ReportGaurav Soni25% (4)
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- Digital Transducers: Group 3Document76 pagesDigital Transducers: Group 3Jasmine RaiNo ratings yet
- Module - 4 Digital and Intelligent Sensors: Position EncodersDocument23 pagesModule - 4 Digital and Intelligent Sensors: Position EncodersJnanavi B ANo ratings yet
- Unit III Total StationDocument15 pagesUnit III Total StationManikandan.R.KNo ratings yet
- Rotary Encoder - Wikipedia, The Free EncyclopediaDocument7 pagesRotary Encoder - Wikipedia, The Free EncyclopediaSigid AriewibowoNo ratings yet
- Unit 1 Adv SurDocument24 pagesUnit 1 Adv SurRakeshKrNo ratings yet
- S&A Optical Encoders PDFDocument34 pagesS&A Optical Encoders PDFNiravNo ratings yet
- Special Survey InstrumentsDocument9 pagesSpecial Survey InstrumentsN AlamNo ratings yet
- Encoder Working Principle TheoryDocument3 pagesEncoder Working Principle TheorySasi DharanNo ratings yet
- Unit 5 Modern Surveying Equipment: StructureDocument19 pagesUnit 5 Modern Surveying Equipment: StructureSeble GetachewNo ratings yet
- Explain The Resection Method With The Help of Two Point ProblemsDocument6 pagesExplain The Resection Method With The Help of Two Point Problemsmercy patelNo ratings yet
- Nano-Metrology Based On The Laser Interferometers: Saeed Olyaee and Samaneh HamediDocument28 pagesNano-Metrology Based On The Laser Interferometers: Saeed Olyaee and Samaneh HamediIsmoy JatiNo ratings yet
- Optical Encoder For Motion Control Through ArduinoDocument4 pagesOptical Encoder For Motion Control Through ArduinoMary LongNo ratings yet
- CollectionDocument8 pagesCollectionvsrikala68100% (1)
- Sensors and Transducers UNIT-IIDocument84 pagesSensors and Transducers UNIT-IITamilnesan PNo ratings yet
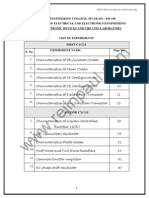
- EDC Lab ManuelDocument73 pagesEDC Lab ManuelRuban Ponraj100% (1)
- KdulDocument47 pagesKdulWasyraf WroslizamNo ratings yet
- Encoders: Presented byDocument6 pagesEncoders: Presented bymybestfriendgrewalNo ratings yet
- Sensors and ActuatorsDocument13 pagesSensors and Actuatorssushanta Kumar ReddyNo ratings yet
- Danaher Encoder HandbookDocument16 pagesDanaher Encoder HandbookatifkhushnoodNo ratings yet
- EncoderDocument23 pagesEncodergnanasekarNo ratings yet
- Rotary Encoder PDFDocument8 pagesRotary Encoder PDFKhaled RabeaNo ratings yet
- Displacement+measurement 0Document12 pagesDisplacement+measurement 0Shine Lim0% (1)
- ElectrogoniometerDocument3 pagesElectrogoniometerGaurav MolankarNo ratings yet
- Safari - Feb 4, 2024 at 11:38 PMDocument1 pageSafari - Feb 4, 2024 at 11:38 PMsyansyncNo ratings yet
- Aries Iit Roorkee Recruitment Manual 2022Document52 pagesAries Iit Roorkee Recruitment Manual 2022Deepak KapaNo ratings yet
- Encoder Lineal-Regla OpticaDocument6 pagesEncoder Lineal-Regla OpticaNemoz ZrNo ratings yet
- Digital Encoders 1.2Document6 pagesDigital Encoders 1.2controlorNo ratings yet
- Introduction To Sensors, Transducers & Actuators: © Rohan Desai-Automobile Dept - New Polytechnic, KolhapurDocument15 pagesIntroduction To Sensors, Transducers & Actuators: © Rohan Desai-Automobile Dept - New Polytechnic, KolhapurbharatNo ratings yet
- Tilt-Shift Eddy Current Probe Impact On InformatioDocument8 pagesTilt-Shift Eddy Current Probe Impact On InformatioANJANI AULIA DEWI mhsD4TEM2019BNo ratings yet
- Sensors and ActuatorsDocument109 pagesSensors and ActuatorsDr-Amit Kumar Singh100% (2)
- Encoder White PaperDocument9 pagesEncoder White Papersaneie99No ratings yet
- What Is A Total StationDocument13 pagesWhat Is A Total StationEr Santosh KaparNo ratings yet
- Robotics UNIT-4 FINALDocument29 pagesRobotics UNIT-4 FINALk.sathwika888No ratings yet
- Deformation MeasurementsDocument42 pagesDeformation MeasurementsjamniczuNo ratings yet
- Application of Arduino Module To Research in Surface PhysicsDocument6 pagesApplication of Arduino Module To Research in Surface PhysicsLaith RiyadhNo ratings yet
- Non Contact Sensor PDFDocument24 pagesNon Contact Sensor PDFGaurav R AgrawalNo ratings yet
- Unit 5Document19 pagesUnit 5RAVAL RAHULNo ratings yet
- 2016070805Document4 pages2016070805dassujoy312No ratings yet
- 1466 1469 Siaudinyte OtherDocument4 pages1466 1469 Siaudinyte OtherAndrei TaranuNo ratings yet
- Unit 4Document45 pagesUnit 4apakkiNo ratings yet
- Chapter One InstruDocument17 pagesChapter One Instrubahiru meleseNo ratings yet
- Take Home Exam 414 Spring 2020Document7 pagesTake Home Exam 414 Spring 2020Omar YehiaNo ratings yet
- Robotics PDFDocument19 pagesRobotics PDFGiovanna PerezNo ratings yet
- Encoder Measurements: How-To Guide: 1. Encoder and Applications OverviewDocument4 pagesEncoder Measurements: How-To Guide: 1. Encoder and Applications Overviewj.emmett.dwyer1033No ratings yet
- Chapter 14Document15 pagesChapter 14Gaurav SharmaNo ratings yet
- Radar System Using Arduino - Project ReportDocument23 pagesRadar System Using Arduino - Project ReportTarang SinghNo ratings yet
- EE2207 Lab ManualDocument72 pagesEE2207 Lab ManualgowthamveluNo ratings yet
- MOCT (Magneto Optic Current Transformer)Document23 pagesMOCT (Magneto Optic Current Transformer)sujithNo ratings yet
- Measure of Angular VelocityDocument12 pagesMeasure of Angular VelocityAshley_Rulzzzzzzz100% (2)
- ESC 201A ExpDocument9 pagesESC 201A Expanshikamittal2626No ratings yet
- Surveying - IIDocument7 pagesSurveying - IISagar MandaleekaNo ratings yet
- LECTURE 2 TheodoliteDocument23 pagesLECTURE 2 TheodoliteKanika AdvaniNo ratings yet
- Chapter-4 4. Other Supplementary Components 4.1 KeyboardDocument5 pagesChapter-4 4. Other Supplementary Components 4.1 Keyboardkssaravana89No ratings yet
- EE-312 Assignment-5 Vedika GargDocument5 pagesEE-312 Assignment-5 Vedika GargdfzerosNo ratings yet
- Photonics, Volume 1: Fundamentals of Photonics and PhysicsFrom EverandPhotonics, Volume 1: Fundamentals of Photonics and PhysicsNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- D.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Document5 pagesD.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Pritam Kumar Singh100% (1)
- DC MotorDocument17 pagesDC MotorSiddique MuhammadNo ratings yet
- Model Sa6200A: Ipt™ Seismic Accelerometer SensorDocument7 pagesModel Sa6200A: Ipt™ Seismic Accelerometer SensorOscar BahozNo ratings yet
- Arduino Tutorials - The AREF PinDocument4 pagesArduino Tutorials - The AREF Pinmask6622000No ratings yet
- Abya18 24lat Aoya18 24lacl SMDocument31 pagesAbya18 24lat Aoya18 24lacl SMMihaela CaciumarciucNo ratings yet
- PC World 2014Document136 pagesPC World 2014Aida Rovcanin100% (2)
- Capitulo III PSS Procedimientos de Pruebas Stand AloneDocument88 pagesCapitulo III PSS Procedimientos de Pruebas Stand AloneelyorkmasNo ratings yet
- WCCH 3Document85 pagesWCCH 3Fetsum LakewNo ratings yet
- Telecommunications 1: Lab #5: AM IF Frequency ResponseDocument4 pagesTelecommunications 1: Lab #5: AM IF Frequency Responseapi-302048482No ratings yet
- Mathematical Proceedings of The Cambridge Philosophical SocietyDocument10 pagesMathematical Proceedings of The Cambridge Philosophical Societybase1No ratings yet
- F BilDocument9 pagesF BilCatherine GallagherNo ratings yet
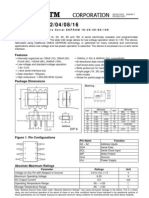
- Datasheet EEPROMDocument9 pagesDatasheet EEPROMIram Loya ValladaresNo ratings yet
- PL HL2220 HL2230 HL2240 HL2240D HL2270DW PDFDocument35 pagesPL HL2220 HL2230 HL2240 HL2240D HL2270DW PDFJosé MaríaNo ratings yet
- Tes 1339Document9 pagesTes 1339frantsNo ratings yet
- Circuit Monitor: Fire Suppression SystemsDocument2 pagesCircuit Monitor: Fire Suppression SystemsAdvenser GroupNo ratings yet
- MM-1071 Battery Backup System Rev BDocument2 pagesMM-1071 Battery Backup System Rev BSyafrudinNo ratings yet
- Abcdef5200 22 Online MKTG Specs 1Document15 pagesAbcdef5200 22 Online MKTG Specs 1felix bazanNo ratings yet
- IPT ReviewDocument17 pagesIPT ReviewShivaji deshmukhNo ratings yet
- GE SCR Manual 4th 1967Document548 pagesGE SCR Manual 4th 1967protobooksNo ratings yet
- F5 Physics: Chapter 3: ElectricityDocument7 pagesF5 Physics: Chapter 3: ElectricityTEE LI XUAN MoeNo ratings yet
- Electric MotorsDocument16 pagesElectric MotorsReszler ArnoldNo ratings yet
- ClanSOFT - Diagrama Técnico Esquemático Completo SM-G531M MUDocument7 pagesClanSOFT - Diagrama Técnico Esquemático Completo SM-G531M MUJunior Souza JrNo ratings yet
- GeoMax Zenith 16 40 UM v1.1.1 enDocument32 pagesGeoMax Zenith 16 40 UM v1.1.1 enmarek.lepczynskiNo ratings yet
- Chap 13a - Testing (Wafer Sorting)Document6 pagesChap 13a - Testing (Wafer Sorting)soonvyNo ratings yet
- Forum Diskusi 4-2 (Resistance Circuits) - Dimas SunuDocument6 pagesForum Diskusi 4-2 (Resistance Circuits) - Dimas SunuSunu DimasNo ratings yet
- Cabos IHMs DeltaDocument10 pagesCabos IHMs DeltaAlex Amaral DiasNo ratings yet
- Ece 2013Document193 pagesEce 2013Manikandan MmsNo ratings yet
- Industrial Power Electronics PDFDocument88 pagesIndustrial Power Electronics PDFsanthoshramrNo ratings yet