Download as pptx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- What Do You Think of The Discounting Scheme That KAR Had Used Historically? Do You Think It Was Justified Given The Circumstances?Document3 pagesWhat Do You Think of The Discounting Scheme That KAR Had Used Historically? Do You Think It Was Justified Given The Circumstances?Lohith Kumar100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- English For Specific Purposes VeterinarianDocument25 pagesEnglish For Specific Purposes VeterinarianChristopher Mccandless83% (6)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Grammar Practice Worksheets - Simple Present - FromDocument1 pageGrammar Practice Worksheets - Simple Present - FromLeonel Agsgdf100% (7)
- GE2777 PentaPals The Urbanization in Davao City and Its Impacts To Climate ChangeDocument7 pagesGE2777 PentaPals The Urbanization in Davao City and Its Impacts To Climate Changewendell tatoy1No ratings yet
- Performance Task 3Document3 pagesPerformance Task 3Angie CondezaNo ratings yet
- Base Sas Interview Questions by TopicDocument15 pagesBase Sas Interview Questions by TopicSneha NagaruruNo ratings yet
- AirbagDocument26 pagesAirbagSneha NagaruruNo ratings yet
- Fuzzy LogicDocument2 pagesFuzzy LogicSneha NagaruruNo ratings yet
- MaglevDocument23 pagesMaglevSneha NagaruruNo ratings yet
- Embedded Web TechnologyDocument3 pagesEmbedded Web TechnologySneha Nagaruru0% (1)
- 952 Abb Awr Mittelspannung E LowDocument88 pages952 Abb Awr Mittelspannung E Lowrobert_rjcNo ratings yet
- General Management Project On PDFDocument29 pagesGeneral Management Project On PDFNishit KanchanNo ratings yet
- Sexologia ProgramaDocument25 pagesSexologia ProgramaLeonardo Hinojosa0% (1)
- Geothermal EnergyDocument23 pagesGeothermal EnergyMuhammad Hafidh67% (6)
- Foundations of EducationDocument2 pagesFoundations of EducationJoan BayanganNo ratings yet
- Lightweight Particles in Aggregate: Standard Test Method ForDocument3 pagesLightweight Particles in Aggregate: Standard Test Method Formanuel davilaNo ratings yet
- Iodine Removal PDFDocument8 pagesIodine Removal PDFAnonymous 6tg80e6BqANo ratings yet
- Research Chpter 1 With Chpter 2Document3 pagesResearch Chpter 1 With Chpter 2Aron JaroNo ratings yet
- DS PNSSDocument3 pagesDS PNSSKathryne May JinonNo ratings yet
- Ujian Sekolah Berstandar Nasional TAHUN PELAJARAN 2018/2019 Lembar SoalDocument5 pagesUjian Sekolah Berstandar Nasional TAHUN PELAJARAN 2018/2019 Lembar SoalPutri SuwandariNo ratings yet
- Process ValidationDocument5 pagesProcess ValidationNarongchai PongpanNo ratings yet
- Jan Paper 2 2010Document7 pagesJan Paper 2 2010Alana AliNo ratings yet
- Balancing Equations 31 PDFDocument5 pagesBalancing Equations 31 PDFIgnacio Jr. PaguyoNo ratings yet
- Ca 2 Cardiovascular-Oxygenation Assignment Part 1Document8 pagesCa 2 Cardiovascular-Oxygenation Assignment Part 1Joseph AbangNo ratings yet
- DNR Duct Detector Installation DetailsDocument6 pagesDNR Duct Detector Installation DetailsBinu SulochananNo ratings yet
- Huawei Tds Sun2000-330ktl-H1 enDocument2 pagesHuawei Tds Sun2000-330ktl-H1 enMuhammad Ali HaiderNo ratings yet
- Literature Review 2. 1 Definition 2. 1. 1 Definition of NsaidsDocument17 pagesLiterature Review 2. 1 Definition 2. 1. 1 Definition of NsaidsROHITNo ratings yet
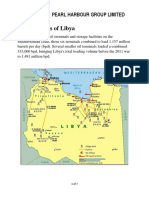
- Oil Terminals of LibyaDocument7 pagesOil Terminals of LibyaBhagoo HatheyNo ratings yet
- Highlights Hello - November 2016Document16 pagesHighlights Hello - November 2016MilenaNo ratings yet
- Osha ExcavationDocument29 pagesOsha ExcavationWahed Mn ElnasNo ratings yet
- 2.educational Qualification & Experience. EssentialDocument4 pages2.educational Qualification & Experience. EssentialParesh MishraNo ratings yet
- NDT Certi JaydeepDocument5 pagesNDT Certi JaydeepDarshanRavalNo ratings yet
- XR 4 Manual Master 1Document1,226 pagesXR 4 Manual Master 1dragos43100% (1)
- Major and Minor SurgeryDocument2 pagesMajor and Minor SurgerydelarakrishnafaithpNo ratings yet
- Well Control - Kill Sheet Pre-Recorded Information Pump Strokes RequiredDocument1 pageWell Control - Kill Sheet Pre-Recorded Information Pump Strokes RequiredscrbdgharaviNo ratings yet