Download as ppt, pdf, or txt
You might also like
- Service Manual: S4S Diesel EngineDocument178 pagesService Manual: S4S Diesel EngineRAJESH RAMDAS100% (1)
- JD 9965 PDFDocument625 pagesJD 9965 PDFJosé Roberto VircentsNo ratings yet
- T/SP/PIP/1: Specification ForDocument31 pagesT/SP/PIP/1: Specification Formichael7michlovsky100% (1)
- Synchronous MotorsDocument27 pagesSynchronous MotorsSyed Muhammad Munavvar Hussain50% (2)
- Group 2 Ac Motors Technical ReportDocument12 pagesGroup 2 Ac Motors Technical Reporttristan jeff bautistaNo ratings yet
- SL030 PDFDocument2 pagesSL030 PDFCesar VillegasNo ratings yet
- Unit VDocument7 pagesUnit VMonte CarloNo ratings yet
- IM (1) NotesDocument4 pagesIM (1) NotesHarshitNo ratings yet
- Induction Motor: From Wikipedia, The Free EncyclopediaDocument6 pagesInduction Motor: From Wikipedia, The Free EncyclopediaJose EvonneNo ratings yet
- Electrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4Document250 pagesElectrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4sanjoni.jainNo ratings yet
- #5 Module 5Document52 pages#5 Module 5anishdeshmukh108No ratings yet
- 3phase Induction Motor (Sukhpreet)Document17 pages3phase Induction Motor (Sukhpreet)Ankesh KunwarNo ratings yet
- Syncronous MotorDocument22 pagesSyncronous MotorSambhav JainNo ratings yet
- Three Phase Induction MotorDocument2 pagesThree Phase Induction MotorsamyramuNo ratings yet
- 2:induction Motor Action: Torque Induced Magnetic FieldDocument3 pages2:induction Motor Action: Torque Induced Magnetic Fieldapi-19880840No ratings yet
- Magnetic Field Faraday's Law Magnetic Flux Induction Motor Resistance Magnetic Field CurrentDocument2 pagesMagnetic Field Faraday's Law Magnetic Flux Induction Motor Resistance Magnetic Field CurrentyokeshNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- Induction MotorDocument12 pagesInduction MotorsacchashuddhoNo ratings yet
- 3-Phase IMDocument16 pages3-Phase IMk rajendraNo ratings yet
- Induction Motor: Working Principle, Types, &Document6 pagesInduction Motor: Working Principle, Types, &0409piyushNo ratings yet
- Induction Motor Working Principle Types PDFDocument6 pagesInduction Motor Working Principle Types PDFdumpyNo ratings yet
- Induction MotorDocument43 pagesInduction MotorJanine Jade SetiasNo ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- AC Synchronous GeneratorDocument8 pagesAC Synchronous Generatoraswardi8756No ratings yet
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- Ac Motors: (A) Synchronous Motors. (B) Asynchronous MotorsDocument18 pagesAc Motors: (A) Synchronous Motors. (B) Asynchronous MotorsStudy portalNo ratings yet
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- Mechatronics Ktu Module 6Document36 pagesMechatronics Ktu Module 6Adarsh s nairNo ratings yet
- The Difference Between Asynchronous and Synchronous MotorsDocument6 pagesThe Difference Between Asynchronous and Synchronous MotorsShiva Kumar ReddyNo ratings yet
- Induction Motors Unit 3Document26 pagesInduction Motors Unit 3babu KaroliNo ratings yet
- Induction Motor ReportDocument13 pagesInduction Motor ReportShivani SinghNo ratings yet
- Unit 1 Three Phase Induction MotorDocument87 pagesUnit 1 Three Phase Induction Motormahato741No ratings yet
- Induction Motor CharacteristicsDocument14 pagesInduction Motor CharacteristicsAnnaRajNo ratings yet
- Induction and Synchronous Motor FundamentalsDocument9 pagesInduction and Synchronous Motor FundamentalsfitxvNo ratings yet
- Induction Motor: Principle of OperationDocument7 pagesInduction Motor: Principle of OperationAbhishek ChibNo ratings yet
- UNIT-III Three Phase & Single Phase Induction MotorsDocument8 pagesUNIT-III Three Phase & Single Phase Induction MotorsRahulRamamoorthyNo ratings yet
- Microsoft Word - 4 - Induction Machines PDFDocument16 pagesMicrosoft Word - 4 - Induction Machines PDFMegat Ahmad FaizNo ratings yet
- Chapter 1 - Introduction To AC MotorDocument13 pagesChapter 1 - Introduction To AC MotorJiachyi YeohNo ratings yet
- AC MotorsDocument48 pagesAC MotorsBrandon SookdeoNo ratings yet
- Induction MotorDocument2 pagesInduction MotorStephen CooperNo ratings yet
- Synchronous Motor & Its Applications & Power Factor ImprovementDocument4 pagesSynchronous Motor & Its Applications & Power Factor ImprovementYash BansalNo ratings yet
- Three Phase Induction Motor Interview Questions 2 1Document24 pagesThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- 1-EM Section 1 Motor OperationDocument38 pages1-EM Section 1 Motor Operationmhafidz49No ratings yet
- Synchronous MotorDocument33 pagesSynchronous Motorvnyshreyas100% (2)
- MotorsDocument7 pagesMotorsVikramNo ratings yet
- 3.18 Ac MotorsDocument25 pages3.18 Ac Motorsdeleted Yt acc.No ratings yet
- 3 Phase Induction Motors PDFDocument11 pages3 Phase Induction Motors PDFFauzan Dimas KusyonoNo ratings yet
- 3 Phase Induction MotorsDocument10 pages3 Phase Induction MotorsSTIP Teknik BravoNo ratings yet
- Three Phase MotorsDocument24 pagesThree Phase MotorsRobert MarcoliniNo ratings yet
- Slip Ring Induction MotorsDocument9 pagesSlip Ring Induction MotorsTuhin ShahNo ratings yet
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its TypessasidaranNo ratings yet
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its Typesandi yusufNo ratings yet
- Synchronous Motor Working PrincipleDocument6 pagesSynchronous Motor Working PrincipleHemraj Singh RautelaNo ratings yet
- AC Machines Stepper, BLCD MotorDocument22 pagesAC Machines Stepper, BLCD MotorMaadheshNo ratings yet
- Synchronous Machines and SCDocument6 pagesSynchronous Machines and SCivancho04mNo ratings yet
- Electrical Motor (1) DDocument20 pagesElectrical Motor (1) Drksamy0102No ratings yet
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- Synchronous MotorDocument26 pagesSynchronous MotorSyed Muhammad Munavvar HussainNo ratings yet
- Ac Motors: An AC Motor Is An Driven by AnDocument18 pagesAc Motors: An AC Motor Is An Driven by AnBalamuni PsaNo ratings yet
- Speed Control of Induction Motor Using AnnDocument67 pagesSpeed Control of Induction Motor Using AnnBnr Goud50% (6)
- Induction Motor: by WiresDocument3 pagesInduction Motor: by Wireswajeeh shahNo ratings yet
- Ac MotorDocument17 pagesAc Motorthebeast.suazoNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- It Encompasses Three Principles: Design Out Toxins, Waste and Pollution Keep Products and Materials in Use Regenerate Natural SystemsDocument12 pagesIt Encompasses Three Principles: Design Out Toxins, Waste and Pollution Keep Products and Materials in Use Regenerate Natural SystemsPushan Kumar DattaNo ratings yet
- CountersDocument36 pagesCountersPushan Kumar DattaNo ratings yet
- Success Starts With IeltsDocument43 pagesSuccess Starts With IeltsPushan Kumar DattaNo ratings yet
- Box 9.7: Modal Symbols: © Cambridge University Press 2009Document1 pageBox 9.7: Modal Symbols: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.2.3c: Shopping: © Cambridge University Press 2009Document1 pageBox 11.2.3c: Shopping: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 14.1.5b: Pictures Into Story: © Cambridge University Press 2009Document1 pageBox 14.1.5b: Pictures Into Story: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 14.1.6c: Putting Stories in Order: © Cambridge University Press 2009Document1 pageBox 14.1.6c: Putting Stories in Order: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.2.3a: Shopping: © Cambridge University Press 2009Document1 pageBox 11.2.3a: Shopping: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.2.4b: Finding Investment Partners: © Cambridge University Press 2009Document1 pageBox 11.2.4b: Finding Investment Partners: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.1.3: Occupations: © Cambridge University Press 2009Document1 pageBox 11.1.3: Occupations: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 11.3.2a: Similarities: © Cambridge University Press 2009Document1 pageBox 11.3.2a: Similarities: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
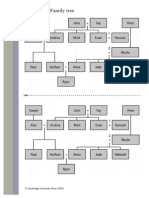
- Box 15.3a: Family Tree: © Cambridge University Press 2009Document1 pageBox 15.3a: Family Tree: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 19.4a: Extending A Story: © Cambridge University Press 2009Document1 pageBox 19.4a: Extending A Story: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 15.3b: Family Tree: © Cambridge University Press 2009Document1 pageBox 15.3b: Family Tree: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 10.3a PDFDocument1 pageBox 10.3a PDFPushan Kumar DattaNo ratings yet
- Box 16.8b: Who's She Talking To?: © Cambridge University Press 2009Document1 pageBox 16.8b: Who's She Talking To?: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Describe The Courses You Have Taught by Summarizing The Course Content and Assignments Required. Subjects I Will Be Comfortable To TeachDocument15 pagesDescribe The Courses You Have Taught by Summarizing The Course Content and Assignments Required. Subjects I Will Be Comfortable To TeachPushan Kumar DattaNo ratings yet
- RSVP Protocol Operation in MPLSDocument2 pagesRSVP Protocol Operation in MPLSPushan Kumar DattaNo ratings yet
- Box 19.2: Relative Quizzes: © Cambridge University Press 2009Document1 pageBox 19.2: Relative Quizzes: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Box 16.5b: Describe and Arrange: © Cambridge University Press 2009Document1 pageBox 16.5b: Describe and Arrange: © Cambridge University Press 2009Pushan Kumar DattaNo ratings yet
- Assignment Applied ElectronicsDocument6 pagesAssignment Applied ElectronicsPushan Kumar DattaNo ratings yet
- Welcome To IndiaDocument7 pagesWelcome To IndiaPushan Kumar DattaNo ratings yet
- Systems and Applications, Mecs Publishers, 2014 (Under Review)Document3 pagesSystems and Applications, Mecs Publishers, 2014 (Under Review)Pushan Kumar DattaNo ratings yet
- Manuals - G200 Series Back Check Valves Instruction Manual, Fisher-ENDocument4 pagesManuals - G200 Series Back Check Valves Instruction Manual, Fisher-ENrey sarNo ratings yet
- NISTIR 5634 Prediction of Cracking in Reinforced Concrete StructuresDocument51 pagesNISTIR 5634 Prediction of Cracking in Reinforced Concrete Structurespmc_lbm4440No ratings yet
- FPT PG Brochure NE ENG 02 2023 WebDocument23 pagesFPT PG Brochure NE ENG 02 2023 WebMohammad ShaatNo ratings yet
- BALLUFF-KT Mechanik Gesamt enDocument135 pagesBALLUFF-KT Mechanik Gesamt enJarosław Polske ZbawNo ratings yet
- KSB Sewabloc Sewatec CharakterystykiDocument112 pagesKSB Sewabloc Sewatec Charakterystykilouis etienneNo ratings yet
- PIEZOMETER (Pressure Tube)Document7 pagesPIEZOMETER (Pressure Tube)Devendra Kumar VishwakarmaNo ratings yet
- Exergetic Analysis of A Gas Turbine With Inlet Air Cooling System PDFDocument28 pagesExergetic Analysis of A Gas Turbine With Inlet Air Cooling System PDFWashoo HasooNo ratings yet
- Bodybuilder Guidelines: Update: 2011-22Document438 pagesBodybuilder Guidelines: Update: 2011-22thkimzone73100% (12)
- Flying Cart Hovercraft PlansDocument8 pagesFlying Cart Hovercraft PlansJimNo ratings yet
- Seminar Report VACCUM BRAKING SYSTEM (1sb16me042)Document22 pagesSeminar Report VACCUM BRAKING SYSTEM (1sb16me042)Manasa100% (1)
- A Review Study On Seismic Response of Steel Building Frames With Different Beam - Column ConnectionsDocument8 pagesA Review Study On Seismic Response of Steel Building Frames With Different Beam - Column ConnectionsIJRASETPublicationsNo ratings yet
- Lift ManualDocument24 pagesLift Manualnaik_shreyNo ratings yet
- SUMMARY - Oscillations and WavesDocument19 pagesSUMMARY - Oscillations and Wavessethupanic macanic gamedzeNo ratings yet
- Workshopmanual - vf750 - Sabre Magna - 1982 1988 19022021 1225Document248 pagesWorkshopmanual - vf750 - Sabre Magna - 1982 1988 19022021 1225Grupo GatroNo ratings yet
- RTA-29 Improved Oil Supply To The Integrated Axial DetunerDocument3 pagesRTA-29 Improved Oil Supply To The Integrated Axial DetunerCatalin CataNo ratings yet
- Reclaimer ChainDocument4 pagesReclaimer ChainAmeer Ahmad RazaNo ratings yet
- Wagner Apprentice Program Offers Tools For SuccessDocument4 pagesWagner Apprentice Program Offers Tools For Successabduallah muhammadNo ratings yet
- Embrague Freno Manual ResorteDocument100 pagesEmbrague Freno Manual ResorteÁlvaro José Abaunza GómezNo ratings yet
- Atlas Copco Gas & Process and Vericor Power Systems Sign A Strategic Alliance To Power Integrally Geared Centrifugal Compressors and Companders™ With Vericor Gas TurbinesDocument2 pagesAtlas Copco Gas & Process and Vericor Power Systems Sign A Strategic Alliance To Power Integrally Geared Centrifugal Compressors and Companders™ With Vericor Gas TurbinesPR.comNo ratings yet
- 2 Phase Stepper CatalogDocument6 pages2 Phase Stepper CatalogShenna Kim CasinilloNo ratings yet
- R PT Instruction PlanDocument6 pagesR PT Instruction PlanVipin KumarNo ratings yet
- Five-Speed Automatic Gearbox With Tiptronic (01V)Document6 pagesFive-Speed Automatic Gearbox With Tiptronic (01V)FSR1407No ratings yet
- Snap-Fit OPTIMIZATIONDocument9 pagesSnap-Fit OPTIMIZATIONManish RajNo ratings yet
- EPS - 10K1 - Solution - Wood Based Panel - Press - 97.ENDocument1 pageEPS - 10K1 - Solution - Wood Based Panel - Press - 97.ENhufuents-1No ratings yet
- MM204 Assn3 2017Document5 pagesMM204 Assn3 2017jayNo ratings yet
- AC MachinesDocument41 pagesAC Machineskr_abhijeet72356587No ratings yet