Download as pptx, pdf, or txt
You might also like
- BS en 50160 2000Document22 pagesBS en 50160 2000gabiunNo ratings yet
- UNIT 5 - Special MachinesDocument33 pagesUNIT 5 - Special MachinesKapilachander ThangavelNo ratings yet
- DC Machines By: Prof RM - Meenakshisunda RamDocument54 pagesDC Machines By: Prof RM - Meenakshisunda RamAshutosh KushwahaNo ratings yet
- Presented by Premchand KumarDocument39 pagesPresented by Premchand KumarRajesh DommetiNo ratings yet
- E.T.E. 3 Phase Transformer InfoDocument9 pagesE.T.E. 3 Phase Transformer InfoSanjay VermaNo ratings yet
- E1 - Controlled Rectifiers PDFDocument92 pagesE1 - Controlled Rectifiers PDFmitulNo ratings yet
- UNIT-III DC MachinesDocument29 pagesUNIT-III DC MachinesK PushyanthNo ratings yet
- Basic Construction of A DC MachineDocument20 pagesBasic Construction of A DC MachinesyammalaNo ratings yet
- Transformer Basics Chapter 3Document9 pagesTransformer Basics Chapter 3ممشطNo ratings yet
- EE 010 402 DC Machines and TransformersDocument2 pagesEE 010 402 DC Machines and TransformersResmara ShajahanNo ratings yet
- (Always Learning) Bali, S.P - Electrical Technology-Dorling Kindersley (India) (2013)Document605 pages(Always Learning) Bali, S.P - Electrical Technology-Dorling Kindersley (India) (2013)theking CorNo ratings yet
- Basic Electrical Engineering ModulesDocument243 pagesBasic Electrical Engineering Modulesfaisal sbennaNo ratings yet
- Chapter 3: Transformer: Electrical MachineDocument39 pagesChapter 3: Transformer: Electrical MachineThe zeroNo ratings yet
- Lecture 7 - Synchronous Generators 7 PDFDocument28 pagesLecture 7 - Synchronous Generators 7 PDFDorwinNeroNo ratings yet
- Three Phase TransformersDocument11 pagesThree Phase TransformersNosta SilvaNo ratings yet
- DC MachinesDocument44 pagesDC MachinesRajeev Rajan50% (2)
- Electrical MachinesDocument38 pagesElectrical Machineshephzi28No ratings yet
- Induction Motors Unit 3Document26 pagesInduction Motors Unit 3babu KaroliNo ratings yet
- Distribution Transformers BrochureDocument12 pagesDistribution Transformers BrochureaboobakerNo ratings yet
- Reference BooksDocument3 pagesReference BooksAmitabhaNo ratings yet
- Electrical Technology (15A02306) : Lecture Notes B.TechDocument60 pagesElectrical Technology (15A02306) : Lecture Notes B.Techabdul kareemNo ratings yet
- Find The Resistances Connected in SeriesDocument14 pagesFind The Resistances Connected in SerieshooloovooNo ratings yet
- (L4) - (JLD 4.0) - Current Electricity - 18th JuneDocument40 pages(L4) - (JLD 4.0) - Current Electricity - 18th JuneSanket SawantNo ratings yet
- Three Phase MeasurementDocument26 pagesThree Phase MeasurementAnjanaNo ratings yet
- Various Methods of Speed Control of Induction Motor-1Document11 pagesVarious Methods of Speed Control of Induction Motor-1Sufail ANo ratings yet
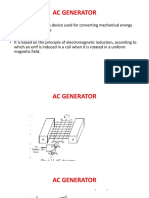
- AC GeneratorDocument37 pagesAC GeneratorS. Dinesh KumarNo ratings yet
- Electric Motors and GeneratorsDocument30 pagesElectric Motors and Generatorshafizrahimmit100% (1)
- Wiring Calculations For Single Family Dwelling UnitDocument8 pagesWiring Calculations For Single Family Dwelling UnitJun MichaelNo ratings yet
- Pec Answers 601 To 700Document5 pagesPec Answers 601 To 700Jevan CalaqueNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- 151-EE-306-01-03-DC MachinesDocument67 pages151-EE-306-01-03-DC MachinesAly Ashraf100% (1)
- Chapter2-1 - Overview of DC MachinesDocument40 pagesChapter2-1 - Overview of DC MachinesTabi4every175% (4)
- Construction of Three Phase Induction MotorDocument18 pagesConstruction of Three Phase Induction MotorRajeev ValunjkarNo ratings yet
- (4-2) Synchronous GeneratorDocument35 pages(4-2) Synchronous Generatorfarah haniNo ratings yet
- Problem Set 1Document9 pagesProblem Set 1jerry tranNo ratings yet
- Types of Single Phase Induction MotorDocument12 pagesTypes of Single Phase Induction Motorkarthikeyan249No ratings yet
- Synchronous Machine ProblemsDocument5 pagesSynchronous Machine Problemsbhuvana71No ratings yet
- EMEDDocument128 pagesEMEDAYŞEGÜLNo ratings yet
- Psoc Course FileDocument14 pagesPsoc Course Filecholleti sriramNo ratings yet
- Unit-2 - DC Machines PDFDocument123 pagesUnit-2 - DC Machines PDFsujithNo ratings yet
- Presentation 1Document15 pagesPresentation 1Ajay Talajiya0% (1)
- Basic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringDocument158 pagesBasic Electrical Machines (Eceg132) Laboratory Manual: Department of Electrical and Computer EngineeringRonan Rojas100% (1)
- DC Machines and Transformers-MinDocument234 pagesDC Machines and Transformers-Min413 YASH MANE100% (1)
- Induction Motor - Double Field Revolving Theory - Universal MotorDocument24 pagesInduction Motor - Double Field Revolving Theory - Universal MotorSree ShobhaNo ratings yet
- CHP 5 Direct CurrentDocument28 pagesCHP 5 Direct CurrentDey TandirerungNo ratings yet
- AC MachinesDocument30 pagesAC MachinesAnonymous 5GBBc45No ratings yet
- Double Cage Rotor of An Induction MotorDocument2 pagesDouble Cage Rotor of An Induction Motorsalma100% (1)
- Module4 TransformerDocument47 pagesModule4 Transformeranvay.shirsatNo ratings yet
- EE8411 - EM 2 LabDocument6 pagesEE8411 - EM 2 LabVengatNo ratings yet
- 6 - Dynamic Model of The Induction MotorDocument11 pages6 - Dynamic Model of The Induction MotorQuynh tran100% (3)
- Chap1 Special MachinesDocument23 pagesChap1 Special MachinesHell Maax100% (2)
- A.C. Series MotorDocument16 pagesA.C. Series MotorM BNo ratings yet
- Induction MachinesDocument81 pagesInduction MachinesaswardiNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Chapter 3 Synchronous GeneratorDocument21 pagesChapter 3 Synchronous Generatorahmad abufares100% (1)
- Lecture DC MachinesDocument40 pagesLecture DC MachinesgeslincarlombetahNo ratings yet
- Construction of Synrel MotorDocument18 pagesConstruction of Synrel MotorAshok Kumar100% (4)
- EM CH-4-5-6 Ac MachinesDocument80 pagesEM CH-4-5-6 Ac Machinesmuhammad.anas2007No ratings yet
- Lecture 7 DC MachinesDocument16 pagesLecture 7 DC MachinesMohamed HosamNo ratings yet
- Week 12Document42 pagesWeek 12M. HamzaNo ratings yet
- Workshop On Automob Ile Mechanics & IC Engin e DesignDocument3 pagesWorkshop On Automob Ile Mechanics & IC Engin e Designrksamy0102No ratings yet
- Air Drone: Company: Li2 Solutions BangaloreDocument3 pagesAir Drone: Company: Li2 Solutions Bangalorerksamy0102No ratings yet
- Total Fare: 429.00 RS.: Passenger InformationDocument2 pagesTotal Fare: 429.00 RS.: Passenger Informationrksamy0102No ratings yet
- FeedbackDocument2 pagesFeedbackrksamy0102No ratings yet
- 3D Printer Building: Enough Talking ! Let's Start Making !Document1 page3D Printer Building: Enough Talking ! Let's Start Making !rksamy0102No ratings yet
- Improving Spray Quality in Diesel Fuel Injection Nozzles: Dr.E.NatrajanDocument12 pagesImproving Spray Quality in Diesel Fuel Injection Nozzles: Dr.E.Natrajanrksamy0102No ratings yet
- Ord20bot20 20buildlog20dot20net 11362268Document1 pageOrd20bot20 20buildlog20dot20net 11362268rksamy0102No ratings yet
- Lec 1Document39 pagesLec 1rksamy0102No ratings yet
- X I TL'":TXL Il::Ni Iiilltth:Lfi$I (I: #It',,Idi.1FfDocument45 pagesX I TL'":TXL Il::Ni Iiilltth:Lfi$I (I: #It',,Idi.1Ffrksamy0102No ratings yet
- Figure 1 - Leyte-Luzon HVDC Transmission ProjectDocument8 pagesFigure 1 - Leyte-Luzon HVDC Transmission ProjectDånøèSåpütråNo ratings yet
- Electrostatic Lens (10 Points) : TheoryDocument4 pagesElectrostatic Lens (10 Points) : TheoryHemendra PrasannaNo ratings yet
- Manual KWG Iso5 en v10 2018Document11 pagesManual KWG Iso5 en v10 2018TTIBCCANo ratings yet
- AWP Unit I Antenna BasicsDocument41 pagesAWP Unit I Antenna BasicsElakkiya ENo ratings yet
- Alilent B1505A Power Device Analyzer Curve Tracer 1Document6 pagesAlilent B1505A Power Device Analyzer Curve Tracer 1Yip Kok ChingNo ratings yet
- Turner 1959Document5 pagesTurner 1959yeyegak481No ratings yet
- Testing & Commissioning of Electrical EquipmentDocument16 pagesTesting & Commissioning of Electrical EquipmentAnkit Yadav100% (1)
- D 4325 - 02 Standard Test Methods For Nonmetallic Semi-Conducting and Electrically Insulating Rubber TapesDocument6 pagesD 4325 - 02 Standard Test Methods For Nonmetallic Semi-Conducting and Electrically Insulating Rubber TapesPaulo Heber Alves BrandaoNo ratings yet
- Cables CatalogueDocument31 pagesCables CataloguePeterNo ratings yet
- Fault Resistance ValuesDocument9 pagesFault Resistance ValuesYogesh Dethe100% (1)
- Mil-Hdbk-728-2 1985Document51 pagesMil-Hdbk-728-2 1985gordarkoNo ratings yet
- EasyLogic DM1000 - DM3000 Series - METSEDM1110Document2 pagesEasyLogic DM1000 - DM3000 Series - METSEDM1110Oussama ChemiNo ratings yet
- BTB 04600 SLDocument6 pagesBTB 04600 SLFreddy Monge BarbaranNo ratings yet
- Lesson Plan: Department Topic Class Course Vocational Pedagogy Three Phase Induction Motor EET-EM-7 AVP-3Document5 pagesLesson Plan: Department Topic Class Course Vocational Pedagogy Three Phase Induction Motor EET-EM-7 AVP-3api-282628079No ratings yet
- Fluke 106 and 107 MultimeterDocument32 pagesFluke 106 and 107 Multimeterbee398No ratings yet
- Typical Wiring Diagram: 7310 Installation InstructionsDocument2 pagesTypical Wiring Diagram: 7310 Installation Instructionsabduallah muhammadNo ratings yet
- Danfoss CoilsDocument22 pagesDanfoss CoilsDaniel TovarNo ratings yet
- Lionel 3010-3011 Switch User's Manual 72-3010-250Document6 pagesLionel 3010-3011 Switch User's Manual 72-3010-250B RNo ratings yet
- Mag Machine 3509Document2 pagesMag Machine 3509Jitendra BhosaleNo ratings yet
- Synchronous Motor Drives - LCIDocument15 pagesSynchronous Motor Drives - LCIJoyson PereiraNo ratings yet
- Electromagnetic Waves PresentationDocument14 pagesElectromagnetic Waves PresentationCyril CauilanNo ratings yet
- Instructions For S811+ Soft Starter, S811+N... and S811+R...Document1 pageInstructions For S811+ Soft Starter, S811+N... and S811+R...Slava ZlotnitskiyNo ratings yet
- IS 7098 (Part-2) - 2011 - Up To Amdmnt-2Document30 pagesIS 7098 (Part-2) - 2011 - Up To Amdmnt-2ricky100% (1)
- Keeley CompressorDocument2 pagesKeeley Compressorpyreal100% (3)
- MEE Unit 3Document34 pagesMEE Unit 3dipak1980No ratings yet
- M.Tech. PE III SemDocument2 pagesM.Tech. PE III SemDrMohammad Rafee ShaikNo ratings yet
- Thomson TSC800 BrocureDocument2 pagesThomson TSC800 BrocureANDRE LUIZ RAMOS DE FREITASNo ratings yet
- L4805-L4885-L4892 L4808-L4810-L4812: Very Low Drop Voltage RegulatorsDocument8 pagesL4805-L4885-L4892 L4808-L4810-L4812: Very Low Drop Voltage RegulatorsjuanNo ratings yet