Download as ppt, pdf, or txt
You might also like
- Uworld Step 2 CK QbankDocument1 pageUworld Step 2 CK Qbankmahroof p0% (3)
- Pdfmergerfreecom Seagull CBT Questions and Answers WordpresscomcompressDocument4 pagesPdfmergerfreecom Seagull CBT Questions and Answers WordpresscomcompressRagilTutuka0% (3)
- How To Get Faster Using The Fridrich/CFOP MethodDocument4 pagesHow To Get Faster Using The Fridrich/CFOP MethodPCwizCube60% (5)
- 40 Key Computer Science Concepts Explained in Layman TermsDocument15 pages40 Key Computer Science Concepts Explained in Layman TermsAngelaNo ratings yet
- Practicing Rails Sample PDFDocument32 pagesPracticing Rails Sample PDF-bNo ratings yet
- Troubleshooting Active Directory Lingering Objects PDFDocument147 pagesTroubleshooting Active Directory Lingering Objects PDFvenkatesh VRNo ratings yet
- How To Teach Yourself To CodeDocument122 pagesHow To Teach Yourself To Codesevenplus83% (6)
- Assignment (3) (1602062) PDFDocument7 pagesAssignment (3) (1602062) PDFnusratNo ratings yet
- Ieb ProjectDocument13 pagesIeb ProjectPallavi PatilNo ratings yet
- Epq Dissertation PresentationDocument4 pagesEpq Dissertation PresentationBuyPsychologyPapersSingapore100% (1)
- Squential Bayesian FiltersDocument1 pageSquential Bayesian FiltersqweqweqweqwzaaaNo ratings yet
- Introduction To Cognitive Robots: Prof. Brian WilliamsDocument17 pagesIntroduction To Cognitive Robots: Prof. Brian WilliamsDimitri KaboreNo ratings yet
- LXB - Linux BasicsDocument35 pagesLXB - Linux BasicsIvan Narki MarkovićNo ratings yet
- Sample CurriculumDocument105 pagesSample Curriculumnabojyoti.guptaNo ratings yet
- 202 2007 0 B PDFDocument10 pages202 2007 0 B PDFtondiNo ratings yet
- Bottleneck - Appendix 2 - Handout-TocDocument2 pagesBottleneck - Appendix 2 - Handout-Tocyogesh lohotNo ratings yet
- Applied Event-Related Potential Data Analysis - CompressedDocument363 pagesApplied Event-Related Potential Data Analysis - CompressedByanca EugêniaNo ratings yet
- IE2141 AY21 - 22 Sem 2 Course AdminDocument24 pagesIE2141 AY21 - 22 Sem 2 Course AdminThant Zaw AungNo ratings yet
- Investigating Equipment Failures Through Root Cause Failure Analysis, 9th Discipline on World Class Maintenance Management: 1, #9From EverandInvestigating Equipment Failures Through Root Cause Failure Analysis, 9th Discipline on World Class Maintenance Management: 1, #9No ratings yet
- Class 3Document91 pagesClass 3RAVI RanjanNo ratings yet
- Kotlin For BeginnersDocument45 pagesKotlin For Beginnershasan zahidNo ratings yet
- EV3 ProgramingDocument19 pagesEV3 ProgramingMontessori Lokanath ReddyNo ratings yet
- Scaling Lucene and Solr - Lucid ImaginationDocument13 pagesScaling Lucene and Solr - Lucid ImaginationnkobialNo ratings yet
- Yann LeCun - What's So Great About - Extreme Learning Machines - MachineLearningDocument11 pagesYann LeCun - What's So Great About - Extreme Learning Machines - MachineLearningIvan AjaNo ratings yet
- Instrumentation Lab EsDocument4 pagesInstrumentation Lab EsHaris KhanNo ratings yet
- Holy Land KanbanDocument162 pagesHoly Land KanbanTiago de Souza BarbosaNo ratings yet
- Inheriting Agile: The IT Practitioner's Guide to Managing Software Development in a Post-Agile WorldFrom EverandInheriting Agile: The IT Practitioner's Guide to Managing Software Development in a Post-Agile WorldNo ratings yet
- Agile Video Training Series 1.1Document6 pagesAgile Video Training Series 1.1Errol100% (1)
- UNIT1 JKarel Answers 2Document61 pagesUNIT1 JKarel Answers 2906144No ratings yet
- 2014-10-08 Wednesday NightDocument13 pages2014-10-08 Wednesday Nightapi-236691972No ratings yet
- Test Management Summit 2009: Graham ThomasDocument14 pagesTest Management Summit 2009: Graham ThomasjohnsonstephenNo ratings yet
- UNIT1 - JKarelDocument63 pagesUNIT1 - JKarelCharli MaldonadoNo ratings yet
- Applying Queueing Theory Analysis To Oracle Statspack Data by Henry PorasDocument26 pagesApplying Queueing Theory Analysis To Oracle Statspack Data by Henry PorasHenry PorasNo ratings yet
- Topic - Unit 5 - Team Problem Solving Activity - Unit 5 Group 3Document13 pagesTopic - Unit 5 - Team Problem Solving Activity - Unit 5 Group 3Vyshnavi ThottempudiNo ratings yet
- Marcin Moskała - Kotlin Coroutines - Deep Dive (Kotlin For Developers)Document469 pagesMarcin Moskała - Kotlin Coroutines - Deep Dive (Kotlin For Developers)kaydenhong2000No ratings yet
- Such Breakdown! 25AA:26TS:23PAT Wow - Student Doctor NetworkDocument20 pagesSuch Breakdown! 25AA:26TS:23PAT Wow - Student Doctor NetworkNathan PhNo ratings yet
- Get An A in TOK Essay Title 5 GuideDocument8 pagesGet An A in TOK Essay Title 5 GuidemonarqueobichoNo ratings yet
- 1 General KR IntroDocument16 pages1 General KR IntromelisnurverirNo ratings yet
- Introduction To SlamDocument75 pagesIntroduction To SlamwilliamNo ratings yet
- Presentation Title: Loa Andersson HuaweiDocument21 pagesPresentation Title: Loa Andersson HuaweipradepkutiNo ratings yet
- Elsn11 - Learning by Doing LD & Feedback - Revised 2022Document59 pagesElsn11 - Learning by Doing LD & Feedback - Revised 2022Rebecca ZengNo ratings yet
- Omnifocus - The Omni Group ForumsDocument9 pagesOmnifocus - The Omni Group ForumsjgravisNo ratings yet
- Agile Retrospective KickstarterDocument47 pagesAgile Retrospective KickstarterAlan MasonNo ratings yet
- Full Chapter Get Programming With Scala Meap V05 Daniela Sfregola PDFDocument53 pagesFull Chapter Get Programming With Scala Meap V05 Daniela Sfregola PDFdavid.cavazos379100% (5)
- Simple Machines and The Rube Goldberg Challenge - Maker Challenge - TeachEngineeringDocument3 pagesSimple Machines and The Rube Goldberg Challenge - Maker Challenge - TeachEngineeringLuz Mery Diaz CasellesNo ratings yet
- How To Have A Bad Career in Research/AcademiaDocument35 pagesHow To Have A Bad Career in Research/AcademiamorterzeroNo ratings yet
- Analytical Mechanics For Spacecraft Dynamics - CourseraDocument10 pagesAnalytical Mechanics For Spacecraft Dynamics - Courseranathanangelo254No ratings yet
- Net2008a 20201112Document6 pagesNet2008a 20201112JoeyLazer12No ratings yet
- Chen Et Al - 2022 - Open-Vocabulary Queryable Scene Representations For Real World PlanningDocument14 pagesChen Et Al - 2022 - Open-Vocabulary Queryable Scene Representations For Real World Planninglizhida726No ratings yet
- Bipedal Robots Control Crash CourseDocument18 pagesBipedal Robots Control Crash CourseshubhamkolheNo ratings yet
- ActionableAgile Metrics For Predictability Lean Coffee ViennaDocument60 pagesActionableAgile Metrics For Predictability Lean Coffee ViennaФёдор АфоновNo ratings yet
- Netbackup SLPDocument28 pagesNetbackup SLPkamakom78No ratings yet
- Fun With LD - PreloadDocument153 pagesFun With LD - Preloadkanne_amNo ratings yet
- Worksheet 4 Follow The GuidelinesDocument3 pagesWorksheet 4 Follow The Guidelinesapi-239713895No ratings yet
- MSMS Learning PlanDocument7 pagesMSMS Learning PlanTeacher MikkaNo ratings yet
- Week1 Slide ECE4010Document301 pagesWeek1 Slide ECE4010Raymond TumiwaNo ratings yet
- Lessons Learned Building A Web 2.0 Application Using MySQL PresentationDocument22 pagesLessons Learned Building A Web 2.0 Application Using MySQL Presentationwarwithin100% (1)
- MEC 529 Introduction To Robotics: Theory and ApplicationsDocument39 pagesMEC 529 Introduction To Robotics: Theory and Applicationsanik sarkerNo ratings yet
- 3.5 Intro2DeepQLearningDocument12 pages3.5 Intro2DeepQLearninganxo4spamNo ratings yet
- ChooseYourSavings ROW Mar2023Document1 pageChooseYourSavings ROW Mar2023Hari KrishnaNo ratings yet
- Triaster Metaloplast Private LimitedDocument16 pagesTriaster Metaloplast Private LimitedHari KrishnaNo ratings yet
- Care Lifting CatalougeDocument28 pagesCare Lifting CatalougeHari KrishnaNo ratings yet
- Ms 02 225Document15 pagesMs 02 225Hari KrishnaNo ratings yet
- MouseDocument15 pagesMouseHari KrishnaNo ratings yet
- Metallic Flexible ConnectorsDocument20 pagesMetallic Flexible ConnectorsHari KrishnaNo ratings yet
- Management Techniques and Medical MaterialsDocument72 pagesManagement Techniques and Medical MaterialsHari KrishnaNo ratings yet
- Managing For Daily Improvement Paul ToddDocument22 pagesManaging For Daily Improvement Paul ToddHari Krishna100% (1)
- Solar Energy Management SystemDocument12 pagesSolar Energy Management SystemHari KrishnaNo ratings yet
- Major Breakthrough Reached in Power Management TechnologyDocument4 pagesMajor Breakthrough Reached in Power Management TechnologyHari KrishnaNo ratings yet
- Networks and Distributed Systems: Time and Logical ClocksDocument31 pagesNetworks and Distributed Systems: Time and Logical ClocksHari KrishnaNo ratings yet
- Space Management: Module - 3Document14 pagesSpace Management: Module - 3Hari KrishnaNo ratings yet
- What's The Right Choice?Document21 pagesWhat's The Right Choice?Hari KrishnaNo ratings yet
- Launching New Products Part Ii: Protecting Forms & New Models in The MarketDocument27 pagesLaunching New Products Part Ii: Protecting Forms & New Models in The MarketHari KrishnaNo ratings yet
- Presentation 1 Project DefinitionDocument14 pagesPresentation 1 Project DefinitionSahoo SKNo ratings yet
- Report On CybercrimeDocument2 pagesReport On CybercrimeKervie Jay LachaonaNo ratings yet
- BCS 3.0 Calculation Issue Questionnaire 2018-02Document19 pagesBCS 3.0 Calculation Issue Questionnaire 2018-02charu.hitechrobot2889No ratings yet
- ICT-CSS12 Q1 Mod1 PerformingComputerOperations Version1Document53 pagesICT-CSS12 Q1 Mod1 PerformingComputerOperations Version1Rainier DoctoleroNo ratings yet
- Intel Core I5 Comparison ChartDocument2 pagesIntel Core I5 Comparison ChartestebanNo ratings yet
- Model Based Design of Pid Controller For BLDC Motor With Implementation ofDocument8 pagesModel Based Design of Pid Controller For BLDC Motor With Implementation ofBrasoveanu GheorghitaNo ratings yet
- Simatic Net PG/PC - Industrial Ethernet CP 1623Document22 pagesSimatic Net PG/PC - Industrial Ethernet CP 1623Oleksandr BeketovNo ratings yet
- PC-3000-Flash (4.0) RussiaDocument2 pagesPC-3000-Flash (4.0) RussiaRajesh DhanambalNo ratings yet
- Statistics WikiDocument118 pagesStatistics WikisandhyaNo ratings yet
- UmanskyBass User ManualDocument15 pagesUmanskyBass User Manualmendonca8422No ratings yet
- Gs33j01a00-00en 015Document4 pagesGs33j01a00-00en 015mojinjoNo ratings yet
- Sorting AlgorithmsDocument2 pagesSorting AlgorithmsCristine Joy JemillaNo ratings yet
- FDRO IPCR FORM (Draft)Document12 pagesFDRO IPCR FORM (Draft)bokbokreonal100% (1)
- Kobra Hp400mlDocument1 pageKobra Hp400mlÖmer FurkanNo ratings yet
- Wheezy - Web IntroductionDocument35 pagesWheezy - Web IntroductionJohn YouNo ratings yet
- EE2354 Syllabus MPMCDocument1 pageEE2354 Syllabus MPMCGokul ChandrasekaranNo ratings yet
- Fabsurplus Auction Equipment For Sale May 2024Document2 pagesFabsurplus Auction Equipment For Sale May 2024arafat877No ratings yet
- Spycernode 4u60 SC - Dat SW - en - 3609 0166 22 - v0100Document2 pagesSpycernode 4u60 SC - Dat SW - en - 3609 0166 22 - v0100Hugo Quintana RochaNo ratings yet
- Spectral Subtraction Based On Minimum StatisticsDocument4 pagesSpectral Subtraction Based On Minimum Statisticstension1117No ratings yet
- 3G Sectorization Sector SplitDocument8 pages3G Sectorization Sector SplitAmos JosephNo ratings yet
- Pic12f1571 PDFDocument334 pagesPic12f1571 PDFazuanr830No ratings yet
- Cli7 1Document802 pagesCli7 1johnjgerberNo ratings yet
- Pengaruh Kreativitas Kedisiplinan Kompensasi Dan Komunikasi Interpersonal Terhadap Kinerja Karyawan Di Pdam Kota PadangDocument12 pagesPengaruh Kreativitas Kedisiplinan Kompensasi Dan Komunikasi Interpersonal Terhadap Kinerja Karyawan Di Pdam Kota PadangMhd FauzanNo ratings yet
- Contact Star Evo1 Datasheet en v1!9!07 2019Document2 pagesContact Star Evo1 Datasheet en v1!9!07 2019Attila SzakalNo ratings yet
- Syllabus: AIT 673 - Cyber Incident Handling/Response: Term: Spring 2018Document12 pagesSyllabus: AIT 673 - Cyber Incident Handling/Response: Term: Spring 2018ggcvbcNo ratings yet
- Birla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionDocument2 pagesBirla Institute of Technology and Science, Pilani Pilani Campus Instruction Divisiontourist101No ratings yet
- ReadmeDocument10 pagesReadmePhụng MinhNo ratings yet
- Supplier Evaluation QuestionnaireDocument4 pagesSupplier Evaluation QuestionnaireDocument Control Officer100% (1)
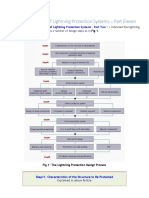
- Design Calculations of Lightning Protection Systems - Part ElevenDocument37 pagesDesign Calculations of Lightning Protection Systems - Part ElevenHansika RajapakshaNo ratings yet
- Future of Weather RadarDocument21 pagesFuture of Weather RadarWaheed Ali BangashNo ratings yet