Download as ppt, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- NAOMI SYSTEM User Guide Ver.9.30.0Document145 pagesNAOMI SYSTEM User Guide Ver.9.30.0Muhammad MuzammilNo ratings yet
- ARRL Handbook For Radio Communications 1981 58thDocument644 pagesARRL Handbook For Radio Communications 1981 58thwetome6467100% (2)
- PARAS 0004.recommended Security Guidelines - Finalreport.v2Document328 pagesPARAS 0004.recommended Security Guidelines - Finalreport.v2Ralph Kevin CantonNo ratings yet
- IC V8 BrochureDocument2 pagesIC V8 BrochureOngky SajaNo ratings yet
- VHF Handbook V9.00 PDFDocument176 pagesVHF Handbook V9.00 PDFclaudia cattaneoNo ratings yet
- Nickson CVDocument5 pagesNickson CVkevin muchungaNo ratings yet
- TS 45.005 - Digital Cellular Telecommunications System GSM PDFDocument278 pagesTS 45.005 - Digital Cellular Telecommunications System GSM PDFRoberto TRNo ratings yet
- Navarea 13 - Russia: 518 KHZ (International)Document6 pagesNavarea 13 - Russia: 518 KHZ (International)СергейNo ratings yet
- EC404 Advanced Communication SystemsDocument2 pagesEC404 Advanced Communication SystemsadityaNo ratings yet
- Assignment Procedure in GSM Call FlowDocument5 pagesAssignment Procedure in GSM Call FlowAchour AnisNo ratings yet
- Axon Body 2 Manual MMU0057Document26 pagesAxon Body 2 Manual MMU0057Alan FrischNo ratings yet
- John Scourias: A Brief Overview of GSM, byDocument14 pagesJohn Scourias: A Brief Overview of GSM, bymohsinakram1No ratings yet
- Frequency Shift KeyingDocument6 pagesFrequency Shift KeyingHafid AlifiantoNo ratings yet
- Master Thesis Marcos MajoDocument57 pagesMaster Thesis Marcos MajolaidoudihlmNo ratings yet
- Icom Ic-M401e Service ManualDocument37 pagesIcom Ic-M401e Service Manualdiverbest2197No ratings yet
- Modeling and Simulation of Mobile Radio Channels: Guest Editors: Matthias Pätzold, Neji Youssef, and Carlos A. GutierrezDocument67 pagesModeling and Simulation of Mobile Radio Channels: Guest Editors: Matthias Pätzold, Neji Youssef, and Carlos A. GutierrezMuvvala Santosh KumarNo ratings yet
- TX9560MT User Manual 042016Document14 pagesTX9560MT User Manual 042016Jason AbalajenNo ratings yet
- Wireless Speed and Direction Control of DC Motor Using RF TechnologyDocument58 pagesWireless Speed and Direction Control of DC Motor Using RF Technologyuppalar196% (25)
- ELR 201201 WTM 4000 System Overview ELearning ReferenceDocument25 pagesELR 201201 WTM 4000 System Overview ELearning Referencesaalicoe100% (1)
- Service Manual: ICF-S10MK2Document13 pagesService Manual: ICF-S10MK2LuizNo ratings yet
- Digital CommunicationDocument4 pagesDigital CommunicationJaya Rajesh RaajNo ratings yet
- Precision RF & Microwave Components: The Industry Leader For High Frequency Components and Thin Film Fabrication ServicesDocument84 pagesPrecision RF & Microwave Components: The Industry Leader For High Frequency Components and Thin Film Fabrication ServicesLOUKILkarimNo ratings yet
- XendfileDocument15 pagesXendfileshivanshNo ratings yet
- Need AnalysisDocument38 pagesNeed Analysisterminator_palitoNo ratings yet
- Projectsoffered 2006Document49 pagesProjectsoffered 2006Tarak BenslimaneNo ratings yet
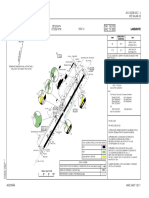
- Plano GCRR 1 UpdatedDocument1 pagePlano GCRR 1 UpdatedAnonymous 4a9UwGNo ratings yet
- 802.11b wp1pdfDocument17 pages802.11b wp1pdfgroupe1 stNo ratings yet
- IJWCSDocument2 pagesIJWCSCS & ITNo ratings yet
- Service Manual 100712Document42 pagesService Manual 100712adavit73No ratings yet
- Gmdss Test by AsusDocument14 pagesGmdss Test by Asusчел100% (2)