Download as pptx, pdf, or txt
You might also like
- Night Vision Technology ReportDocument21 pagesNight Vision Technology ReportPradeepdarshan Pradeep100% (3)
- Led Monitor: Service ManualDocument16 pagesLed Monitor: Service ManualabdelkaderNo ratings yet
- Final PPT of Night VisionDocument35 pagesFinal PPT of Night VisionPradeepdarshan Pradeep70% (10)
- Removing Sentinel SuperPro Dongle From ApplicationsDocument31 pagesRemoving Sentinel SuperPro Dongle From ApplicationsAzam KhanNo ratings yet
- Example Short Circuit Current Faults - Scenario 9Document7 pagesExample Short Circuit Current Faults - Scenario 9PGNo ratings yet
- Programable PPTDocument91 pagesProgramable PPTJay PatelNo ratings yet
- CortexM Registers 2Document27 pagesCortexM Registers 2Sai Mohnish MuralidharanNo ratings yet
- ARM 1vDocument31 pagesARM 1vsuntosh_14No ratings yet
- 11 ARM ProcessorDocument54 pages11 ARM ProcessorRobin SinghNo ratings yet
- What Is A Microprocessor?: - Computer's Central Processing Unit (CPU) Built On A SingleDocument74 pagesWhat Is A Microprocessor?: - Computer's Central Processing Unit (CPU) Built On A SingleDarren Sherwin KennyNo ratings yet
- Lecture 6b: MSP430 Assembly Language Tutorial: MSP430 CPUDocument64 pagesLecture 6b: MSP430 Assembly Language Tutorial: MSP430 CPUSufyan NikaninNo ratings yet
- TMS320LF2407Document90 pagesTMS320LF2407Polumuri RamanaNo ratings yet
- ED Unit-1Document83 pagesED Unit-1Brij Nandan SinghNo ratings yet
- SP Unit 3 SBDocument72 pagesSP Unit 3 SBtoxicking984No ratings yet
- Unit 3 ATEDocument44 pagesUnit 3 ATEDeepu SadasivuniNo ratings yet
- Unit 4Document53 pagesUnit 4subithavNo ratings yet
- New Chapter 2 Micro ArchitectureDocument25 pagesNew Chapter 2 Micro ArchitectureAmzar ShukriNo ratings yet
- PIC 16f877a Memory OrganizationDocument33 pagesPIC 16f877a Memory OrganizationTarek BarhoumNo ratings yet
- Unit-4.ppt MicrocontrollerDocument74 pagesUnit-4.ppt MicrocontrollerVigneshwaran KandaswamyNo ratings yet
- SSSCDocument28 pagesSSSCMahesh KoliNo ratings yet
- Microprocessors 8085Document74 pagesMicroprocessors 8085Just 2ViewNo ratings yet
- Module 2BDocument29 pagesModule 2BDaniel AgbajeNo ratings yet
- Topic 3 Processor FunctionDocument52 pagesTopic 3 Processor FunctionTharinda LasithaNo ratings yet
- Es Unit1Document83 pagesEs Unit1venneti kiranNo ratings yet
- Embedded Microprocessor Lecture 2Document15 pagesEmbedded Microprocessor Lecture 2ojasbhosale07No ratings yet
- ARM Cortex M3 RegistersDocument22 pagesARM Cortex M3 RegistersRaveendra Moodithaya100% (2)
- ARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersDocument60 pagesARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersPraveen EdulaNo ratings yet
- Architecture of c5xDocument19 pagesArchitecture of c5xB11 Aswathy SureshNo ratings yet
- Es Unit1Document83 pagesEs Unit1venneti kiranNo ratings yet
- Unit V Digital Signal ProcessorDocument46 pagesUnit V Digital Signal ProcessorSharath ChandanNo ratings yet
- Intro To ARM Cortex-M3 (CM3) and LPC17xx MCU: OutlineDocument79 pagesIntro To ARM Cortex-M3 (CM3) and LPC17xx MCU: OutlinesupriyaNo ratings yet
- DSP Processor FundamentalsDocument58 pagesDSP Processor FundamentalsSayee KrishnaNo ratings yet
- Presentation 1Document15 pagesPresentation 1kalash satypalNo ratings yet
- Simple As Possible Computer (SAP-1) : Lecture-3Document44 pagesSimple As Possible Computer (SAP-1) : Lecture-3Tawhid KhondakarNo ratings yet
- 04 8051 Instruction SetDocument76 pages04 8051 Instruction SetharinkhedetNo ratings yet
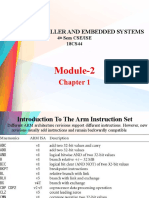
- Module-2: Microcontroller and Embedded SystemsDocument74 pagesModule-2: Microcontroller and Embedded Systemsswethaashok28No ratings yet
- Processor Organization: Module-3 Part-2Document88 pagesProcessor Organization: Module-3 Part-2Khushi MahawarNo ratings yet
- Power PC ArchitectureDocument28 pagesPower PC ArchitecturedesamratNo ratings yet
- Cortex-M3/M4 ArchitectureDocument25 pagesCortex-M3/M4 Architecturesuhaskakade0075745No ratings yet
- Lecture#2 Fut Microprocessor PDFDocument81 pagesLecture#2 Fut Microprocessor PDFAhmedGamalNo ratings yet
- Module 3 CoaDocument17 pagesModule 3 CoaGourab DashNo ratings yet
- Pic 16F84Document59 pagesPic 16F84drago.fire.x326No ratings yet
- Digital Signal Processor 3Document25 pagesDigital Signal Processor 3Vijayaraghavan VNo ratings yet
- CoE3DJ4 Digital Systems Design Hardware SummaryDocument164 pagesCoE3DJ4 Digital Systems Design Hardware SummaryhossamalsherbinyNo ratings yet
- 57 Ma NotesDocument21 pages57 Ma NotesKajal GoudNo ratings yet
- Week 02Document55 pagesWeek 02aroosa naheedNo ratings yet
- 8085 Microprocess or ArchitectureDocument39 pages8085 Microprocess or ArchitectureAbhi SharmaNo ratings yet
- Microcontroller 8051 - PART1Document65 pagesMicrocontroller 8051 - PART1Shreyash ChaudhariNo ratings yet
- Questionnaire MICROPROCESSOR PART 1 UNIT 1 and 2Document20 pagesQuestionnaire MICROPROCESSOR PART 1 UNIT 1 and 2aditya2021cs081No ratings yet
- MPS Lecture 3 - The Microprocessor and Its ArchitectureDocument26 pagesMPS Lecture 3 - The Microprocessor and Its ArchitectureShehroze TalatNo ratings yet
- Architecture of Computers Lab1Document28 pagesArchitecture of Computers Lab1q5nfvkbyyrNo ratings yet
- Computational Building Blocks of DSPDocument28 pagesComputational Building Blocks of DSPVasantha Chandrasekaran80% (5)
- Reduced Instruction Set Computers: William Stallings Computer Organization and Architecture 7 EditionDocument38 pagesReduced Instruction Set Computers: William Stallings Computer Organization and Architecture 7 EditionSaimo FortuneNo ratings yet
- Embedded SystemsDocument136 pagesEmbedded Systemsjapheth louie m. gofredoNo ratings yet
- 8085 Instruction Addressing Modes ImppDocument87 pages8085 Instruction Addressing Modes ImppRohan VaidyaNo ratings yet
- L02 MSP430Document34 pagesL02 MSP430Srinivas VN100% (1)
- Introduction To 68HC11 MICROCONTROLLERDocument72 pagesIntroduction To 68HC11 MICROCONTROLLERNarasimha Murthy Yayavaram100% (3)
- 8085 Intel MicroprocessorDocument16 pages8085 Intel MicroprocessorMartino Ojwok AjangnayNo ratings yet
- ARM7TDMI ProcessorDocument44 pagesARM7TDMI Processormuralik_64No ratings yet
- Computer Architecture and Microprocessors NGoyalDocument25 pagesComputer Architecture and Microprocessors NGoyalJoy OchoaNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- A Brief History of Real Time Embedded SystemDocument27 pagesA Brief History of Real Time Embedded SystemPradeepdarshan PradeepNo ratings yet
- Fuzzy Inference SystemDocument10 pagesFuzzy Inference SystemPradeepdarshan PradeepNo ratings yet
- Implementation of ConvolutionDocument3 pagesImplementation of ConvolutionPradeepdarshan PradeepNo ratings yet
- Static Timing AnalysisDocument9 pagesStatic Timing AnalysisPradeepdarshan PradeepNo ratings yet
- Synopsis On Vedic MultiplerDocument10 pagesSynopsis On Vedic MultiplerPradeepdarshan PradeepNo ratings yet
- Pradeep S: Career ObjectiveDocument2 pagesPradeep S: Career ObjectivePradeepdarshan PradeepNo ratings yet
- MEMS Assignment 2Document5 pagesMEMS Assignment 2shriniwas ghadyaljiNo ratings yet
- GATE 2013 Offline Exam Admit Card: Instructions To The CandidateDocument1 pageGATE 2013 Offline Exam Admit Card: Instructions To The CandidateKumar KNo ratings yet
- Oracle MOC - Excellant White PaperDocument7 pagesOracle MOC - Excellant White Papervenvimal1No ratings yet
- Dependence of Current On PD Across A Resistor: Done By: Anjali Xii-ADocument13 pagesDependence of Current On PD Across A Resistor: Done By: Anjali Xii-AAnjaliNo ratings yet
- Riello Multiplus Ups Series 30 40 Manual Version 2008 2011Document50 pagesRiello Multiplus Ups Series 30 40 Manual Version 2008 2011Aguibou NianeNo ratings yet
- Haemospect: A Device With Potential Public Health ImportanceDocument2 pagesHaemospect: A Device With Potential Public Health ImportancePappu Keka100% (1)
- Deutz ApplicationDocument10 pagesDeutz ApplicationAndry Priyanto100% (2)
- CAN Connection, VIC-3 Electronic Unit (D358)Document3 pagesCAN Connection, VIC-3 Electronic Unit (D358)Vincent Price100% (1)
- Kks Handbook Edition 08Document113 pagesKks Handbook Edition 08David BenderNo ratings yet
- DS35-08A Datasheet (Hoja de Datos) IXYS Corporation DIODODocument2 pagesDS35-08A Datasheet (Hoja de Datos) IXYS Corporation DIODORonald ReinosaNo ratings yet
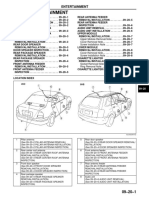
- Toyota Land Cruiser 1998 2007 Body Electrical Service Repair ManualDocument20 pagesToyota Land Cruiser 1998 2007 Body Electrical Service Repair Manualeverett100% (50)
- EntertainmentDocument9 pagesEntertainmentSebastian SirventNo ratings yet
- Dreambox 7000 For Newbies 5.5 PDFDocument85 pagesDreambox 7000 For Newbies 5.5 PDFzoran.matuskoNo ratings yet
- 3vlithium Techinfo GeneralDocument3 pages3vlithium Techinfo GeneralDivijNo ratings yet
- Instruction Manual: VHF Marine TransceiverDocument68 pagesInstruction Manual: VHF Marine TransceiverMarvinNo ratings yet
- Model G0555Xh 14" Extreme-Series Resaw Bandsaw: Owner'S ManualDocument72 pagesModel G0555Xh 14" Extreme-Series Resaw Bandsaw: Owner'S Manualcarl12No ratings yet
- Antena - Dualband HWXX-6516DS1-VTM - Commscope-Obi PDFDocument3 pagesAntena - Dualband HWXX-6516DS1-VTM - Commscope-Obi PDFAndrei GhitiuNo ratings yet
- JP33 Owners ManualDocument36 pagesJP33 Owners ManualJose QuiscaNo ratings yet
- t1000 Plus Application GuideDocument145 pagest1000 Plus Application GuideJonathan NeoNo ratings yet
- ملخص يشرح القلابات PDFDocument15 pagesملخص يشرح القلابات PDFZaki Zàkiï Zacharias100% (1)
- Industrial Drives & Applications: Module - 1Document19 pagesIndustrial Drives & Applications: Module - 1NiharikaNo ratings yet
- Operating SystemsDocument27 pagesOperating SystemsRaquel SalazarNo ratings yet
- Tps 2033Document29 pagesTps 2033Ricky RiavaldiNo ratings yet
- 8-Bit ComputerDocument55 pages8-Bit Computerxowodi9273No ratings yet
- Lps 25 HBDocument50 pagesLps 25 HBPashaNo ratings yet
- Difference Bwteen LTE TDD and LTE TDDDocument28 pagesDifference Bwteen LTE TDD and LTE TDDSâu SâuNo ratings yet
- Bd9483xx-E White LED Driver TV Panasonic TC42 - AS610HDocument32 pagesBd9483xx-E White LED Driver TV Panasonic TC42 - AS610HOlmedoHurtadoNo ratings yet