Download as pptx, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- GST200 Intelligent Fire Alarm Control Panel Issue 4.06Document54 pagesGST200 Intelligent Fire Alarm Control Panel Issue 4.06hamadelsawiNo ratings yet
- AGC300 AGC300 Rev0Document11 pagesAGC300 AGC300 Rev0raj_ritu_aNo ratings yet
- Practical Solution Guide To ArcFlash Hazards PDFDocument150 pagesPractical Solution Guide To ArcFlash Hazards PDFroomel100% (2)
- Samsung UE32F6100 Chasis U88A TroubleshootingDocument51 pagesSamsung UE32F6100 Chasis U88A Troubleshootingpasantito100% (1)
- VOTANO Test ResultsDocument6 pagesVOTANO Test ResultsJORGE ENRIQUE PINZON GARCIANo ratings yet
- Kx-tg7321fx User GuideDocument60 pagesKx-tg7321fx User GuideHoria GiurgiuNo ratings yet
- Manual de Uso RectificadorDocument33 pagesManual de Uso RectificadorLuis Luna CruzNo ratings yet
- A PE4518R14v 06Document3 pagesA PE4518R14v 06itsafakeaccountNo ratings yet
- Instrumentation Cable BSDocument42 pagesInstrumentation Cable BSShivaniNo ratings yet
- EHVHV Cable Sheath EarthingDocument12 pagesEHVHV Cable Sheath EarthingHimdad Tahir100% (1)
- DPK, DPK.V: Installation and Operating InstructionsDocument28 pagesDPK, DPK.V: Installation and Operating InstructionsJeremiah Abad Aquino DiolaNo ratings yet
- 1710-2690 / 1710-2690 MHZ MHZ: Xxpol / 65° Az 18.0 / 18.0 DbiDocument2 pages1710-2690 / 1710-2690 MHZ MHZ: Xxpol / 65° Az 18.0 / 18.0 DbiAdi PrasetyoNo ratings yet
- Technical - Handbook - OMAN CABLES PDFDocument70 pagesTechnical - Handbook - OMAN CABLES PDFSahul HameedNo ratings yet
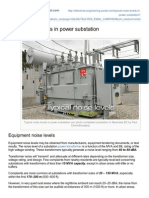
- Typical Noise Levels in Power SubstationDocument2 pagesTypical Noise Levels in Power SubstationRobert GalarzaNo ratings yet
- Transformer ManualDocument63 pagesTransformer Manualmohammed.omaraNo ratings yet
- PLC SwitchesDocument18 pagesPLC SwitchesMuhammad Sadiq OrakzaiNo ratings yet
- Led Lights Advantages and DisadvantagesDocument2 pagesLed Lights Advantages and DisadvantagesAnkur ChopraNo ratings yet
- QG4 - 440 - Operators - Manual - R16 - SCRNDocument32 pagesQG4 - 440 - Operators - Manual - R16 - SCRNMarcelo MalagoNo ratings yet
- Experimental Physics Laboratory PH331 PDFDocument218 pagesExperimental Physics Laboratory PH331 PDFKarthikeyan SubbuNo ratings yet
- EB27B04SCDocument1 pageEB27B04SCLucasHCNo ratings yet
- Chapter 3 ElectromagnetismDocument29 pagesChapter 3 ElectromagnetismAnonymous oW9OeJvEvNo ratings yet
- E Installation of BatteryDocument16 pagesE Installation of BatteryPrashant KadamNo ratings yet
- Feed-Through Terminal Block - UK 2,5 N BK - 0719100: Key Commercial DataDocument22 pagesFeed-Through Terminal Block - UK 2,5 N BK - 0719100: Key Commercial Datasherub wangdiNo ratings yet
- GTEM Correlation - IEEE - 93Document9 pagesGTEM Correlation - IEEE - 93adelinaploscaruNo ratings yet
- Optoelectronics: Application Note Solid State Relay and Application CircuitsDocument13 pagesOptoelectronics: Application Note Solid State Relay and Application Circuitsght113No ratings yet
- LDR PDFDocument136 pagesLDR PDFvighneshNo ratings yet
- Power System Protection: Dr. Lionel R. Orama Exclusa, PE Week 3Document56 pagesPower System Protection: Dr. Lionel R. Orama Exclusa, PE Week 3anuragpugaliaNo ratings yet
- Hitachi ABB Power Grids Digital Substations Workshop 03.07.2020Document42 pagesHitachi ABB Power Grids Digital Substations Workshop 03.07.2020Shailesh ChettyNo ratings yet
- Protopic540 Quatro SlitDocument51 pagesProtopic540 Quatro SlitAlejandro MelianNo ratings yet
- 'Ulyhfrq: Instruction ManualDocument36 pages'Ulyhfrq: Instruction ManualAndri kuswandiNo ratings yet