Download as pptx, pdf, or txt
You might also like
- Dubai's Golden SandsDocument17 pagesDubai's Golden SandsscrbdfanNo ratings yet
- Intrusion Detection Guide Fnvbdo PDFDocument139 pagesIntrusion Detection Guide Fnvbdo PDFHarish JainNo ratings yet
- Top 20 Countries Found To Have The Most CybercrimeDocument5 pagesTop 20 Countries Found To Have The Most CybercrimeAman Dheer KapoorNo ratings yet
- Sequence of Operation of FahuDocument1 pageSequence of Operation of FahuahmedNo ratings yet
- Power OscillationsDocument54 pagesPower OscillationsVijay RohillaNo ratings yet
- Gi 3311211125Document5 pagesGi 3311211125Shakeel RanaNo ratings yet
- Power System TransientsDocument11 pagesPower System TransientsKhairul AshrafNo ratings yet
- Improvement of Transient Stability of Two Machine System Using Static VAR Compensator and Power System StabilizerDocument4 pagesImprovement of Transient Stability of Two Machine System Using Static VAR Compensator and Power System StabilizereditorijsaaNo ratings yet
- Iraq Network 400kV, 50Hz Interconnect With Iran, Turkey and Syria Inter-Area Oscillation Damping and Voltage Regulation by Using SVCDocument6 pagesIraq Network 400kV, 50Hz Interconnect With Iran, Turkey and Syria Inter-Area Oscillation Damping and Voltage Regulation by Using SVCMuhammad ZahidNo ratings yet
- Power System Stability Improvement Using Facts Devices: S.V College of Engineering, Dept. of EEEDocument21 pagesPower System Stability Improvement Using Facts Devices: S.V College of Engineering, Dept. of EEEbhuvanaNo ratings yet
- Performance Analysis and Comparison of Various FACTS Devices in Power SystemDocument7 pagesPerformance Analysis and Comparison of Various FACTS Devices in Power SystemWaqar Ali SherNo ratings yet
- How FACTS Controllers Benefit AC Transmission SystemsDocument29 pagesHow FACTS Controllers Benefit AC Transmission SystemspavanpabbaNo ratings yet
- Transient Stability of Power System by Static VAR Compensator (SVC) and Power System Stabilizers (PSS) Using Matlab/SimulinkDocument5 pagesTransient Stability of Power System by Static VAR Compensator (SVC) and Power System Stabilizers (PSS) Using Matlab/SimulinkArunima SahaNo ratings yet
- Stability Improvement Based On Power System Stabilizer and Static VAR CompensatorDocument7 pagesStability Improvement Based On Power System Stabilizer and Static VAR Compensatormahesh_pattabhi038No ratings yet
- Small Signal Stability AnalysisDocument71 pagesSmall Signal Stability AnalysisRick Leon VasquezNo ratings yet
- Conventional ACTm LIMITATIONSDocument52 pagesConventional ACTm LIMITATIONSAnju JamesNo ratings yet
- Mitigation of Sub Synchronous Oscillations in ADocument7 pagesMitigation of Sub Synchronous Oscillations in ARamesh GosuNo ratings yet
- 1 - Flow of Power in AC System and ConventionalDocument22 pages1 - Flow of Power in AC System and ConventionalchintanpNo ratings yet
- Indirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewDocument4 pagesIndirect Control Techniques For Cascaded Multilevel Inverter (CMLI) STATCOM:A ReviewRavinder RangaNo ratings yet
- What Is Facts?Document36 pagesWhat Is Facts?TahirAbbasNo ratings yet
- SVC in MatlabDocument7 pagesSVC in MatlabmPradeep82No ratings yet
- Voltage Support Control Strategies For Static Synchronous Compensators Under Unbalanced Voltage SagsDocument4 pagesVoltage Support Control Strategies For Static Synchronous Compensators Under Unbalanced Voltage SagschikatisivashankarNo ratings yet
- Optimum Location of Static Var Compensator (SVC) in Over Head Transmission Lines C. Dinakaran G. BalasundaramDocument5 pagesOptimum Location of Static Var Compensator (SVC) in Over Head Transmission Lines C. Dinakaran G. BalasundaramM Yudi NugrohoNo ratings yet
- TCSC Are Used To Improve Power Handling Capability and Reduce Line Losses in Power SystemsDocument2 pagesTCSC Are Used To Improve Power Handling Capability and Reduce Line Losses in Power SystemsSerge KewouNo ratings yet
- IOSR JournalsDocument6 pagesIOSR JournalsInternational Organization of Scientific Research (IOSR)No ratings yet
- DC Power ModulationDocument13 pagesDC Power ModulationKoteswaraRao80% (5)
- FactsDocument31 pagesFactsSanjeev Kumar T M0% (1)
- Effectiveness of FACTS Devices For Power System Stability EnhancementDocument4 pagesEffectiveness of FACTS Devices For Power System Stability EnhancementMehul JainNo ratings yet
- Improvement of Power System Stability by Using SVC With Cascade PID ControllerDocument8 pagesImprovement of Power System Stability by Using SVC With Cascade PID ControllermPradeep82No ratings yet
- By:-S.Shivaprasad N.Swathireddy T.Ramu RanjankumarDocument36 pagesBy:-S.Shivaprasad N.Swathireddy T.Ramu RanjankumarShiva Prasad SankojuNo ratings yet
- FACTS ControllersDocument212 pagesFACTS ControllersJestin K John100% (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Flexible AC Transmission FACTS-Technology and Novel Control Strategies For Power System Stability EnhancementDocument19 pagesFlexible AC Transmission FACTS-Technology and Novel Control Strategies For Power System Stability EnhancementSrinivas GoudNo ratings yet
- MATLAB-Based Transient Stability Analysis of A Power SystemDocument34 pagesMATLAB-Based Transient Stability Analysis of A Power Systemsamarahmad2008479875% (4)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- A Review On Application of FACTS Devices in Power System Stability ImprovementDocument5 pagesA Review On Application of FACTS Devices in Power System Stability ImprovementIJSTANo ratings yet
- Analysis of Dynamic Power Factor Correction Using Flexible Ac Transmission SystemsDocument6 pagesAnalysis of Dynamic Power Factor Correction Using Flexible Ac Transmission SystemsAnikendu MaitraNo ratings yet
- Enhancing Power Quality With Improved Dynamic Voltage Register Based Three Phase Four Wire SystemDocument85 pagesEnhancing Power Quality With Improved Dynamic Voltage Register Based Three Phase Four Wire SystemPidikiti Surendra BabuNo ratings yet
- Enhancement of Transient Stability in Transmission Line Using SVC Facts ControllerDocument6 pagesEnhancement of Transient Stability in Transmission Line Using SVC Facts ControllerKamran KhanNo ratings yet
- 1.1.3 Flexible AC Transmission System (FACTS)Document14 pages1.1.3 Flexible AC Transmission System (FACTS)Richardson PaduaNo ratings yet
- Static Var CompensatorDocument12 pagesStatic Var CompensatorBengal Gaming100% (2)
- D StatcomDocument29 pagesD StatcomSai Pranahita Bhaskarapantulu100% (1)
- Thyristor Controlled Series Capacitor FAIR COPY 1234Document66 pagesThyristor Controlled Series Capacitor FAIR COPY 1234senthil_k23No ratings yet
- Introduction To FACTSDocument37 pagesIntroduction To FACTSPranesh Kulkarni88% (8)
- Damping of Sub Synchronous Resonance Using SSSC Based PWM Hysteresis ControllerDocument9 pagesDamping of Sub Synchronous Resonance Using SSSC Based PWM Hysteresis ControllerrajapandiyaNo ratings yet
- STATCOM-ET - 10june-6aug ReportDocument37 pagesSTATCOM-ET - 10june-6aug ReportVamsi SwapnaNo ratings yet
- Transient Stability Performance Analysis of Power System Using Facts DevicesDocument7 pagesTransient Stability Performance Analysis of Power System Using Facts Devicesrasim_m1146No ratings yet
- Final Simple Facts SummaryDocument11 pagesFinal Simple Facts SummaryIhuhwa Marta TauNo ratings yet
- Voltage Control and Dynamic Performance of Power Transmission Using Static VAR CompensatorDocument11 pagesVoltage Control and Dynamic Performance of Power Transmission Using Static VAR CompensatormuhammadmusakhanNo ratings yet
- IEEE-FACTs & HVDC - Modern Countermeasures To BlackoutsDocument10 pagesIEEE-FACTs & HVDC - Modern Countermeasures To BlackoutsGustavo AguayoNo ratings yet
- BE EE 8 Sem - FACTs 01-Neha SinghDocument7 pagesBE EE 8 Sem - FACTs 01-Neha SinghSurajit BanerjeeNo ratings yet
- Power System Stabilization by Synchronous Condenser With Excitation ControlDocument6 pagesPower System Stabilization by Synchronous Condenser With Excitation ControlLuc JeanNo ratings yet
- TheoryDocument52 pagesTheoryVeera Hemavardhan Reddy YaparlaNo ratings yet
- Power Quality Improvement of Distribution System Using D-STATCOMDocument11 pagesPower Quality Improvement of Distribution System Using D-STATCOMShashankNo ratings yet
- Power System Operation and Control: Name: Govindu Santhosh Kumar BalajiDocument2 pagesPower System Operation and Control: Name: Govindu Santhosh Kumar BalajisreejaNo ratings yet
- Ijreee 2013Document9 pagesIjreee 2013kiranNo ratings yet
- Facts: Flexible A.C Transmission SystemDocument29 pagesFacts: Flexible A.C Transmission SystemVenkatesh PalakaluriNo ratings yet
- Voltage StabilityDocument27 pagesVoltage StabilityDevendra SharmaNo ratings yet
- 1 PDFDocument4 pages1 PDFMohan KrishnaNo ratings yet
- Un SVCDocument2 pagesUn SVCsoukaiinabensnah01No ratings yet
- Benefits of FACTS For Transmission SystemsDocument3 pagesBenefits of FACTS For Transmission SystemsSergio Fonseca RochaNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Towards Faster Givens Rotations Based Power System State EstimatorDocument7 pagesTowards Faster Givens Rotations Based Power System State EstimatorPraveen Nayak BhukyaNo ratings yet
- PS 2 Viva Question and AnswersDocument5 pagesPS 2 Viva Question and AnswersPraveen Nayak Bhukya0% (3)
- Civil Services (Prelim) Exam 2011: Paper-IDocument22 pagesCivil Services (Prelim) Exam 2011: Paper-IPraveen Nayak BhukyaNo ratings yet
- Civil services-GOWRIDocument60 pagesCivil services-GOWRIPraveen Nayak BhukyaNo ratings yet
- Geometry of CurvesDocument6 pagesGeometry of CurvesPraveen Nayak BhukyaNo ratings yet
- Gowri Ee Companies ListDocument489 pagesGowri Ee Companies ListPraveen Nayak BhukyaNo ratings yet
- General Coordinate Systems in DomainsDocument20 pagesGeneral Coordinate Systems in DomainsPraveen Nayak BhukyaNo ratings yet
- Multidimensional GeometryDocument52 pagesMultidimensional GeometryPraveen Nayak BhukyaNo ratings yet
- Iosr SampleDocument12 pagesIosr SamplePraveen Nayak BhukyaNo ratings yet
- Final PaperDocument9 pagesFinal PaperPraveen Nayak BhukyaNo ratings yet
- List of Figures: 10 Microwave Transmission Link 14Document2 pagesList of Figures: 10 Microwave Transmission Link 14Praveen Nayak BhukyaNo ratings yet
- 1Document2 pages1Praveen Nayak BhukyaNo ratings yet
- Chapter1-3 - Three Phase TransformerDocument29 pagesChapter1-3 - Three Phase TransformerPraveen Nayak BhukyaNo ratings yet
- AcknowledgementDocument1 pageAcknowledgementPraveen Nayak BhukyaNo ratings yet
- By: Val Tocitu Jason Kulpe Alexandre Mariuzza: ME 4447/6405 October 29, 2009Document48 pagesBy: Val Tocitu Jason Kulpe Alexandre Mariuzza: ME 4447/6405 October 29, 2009Praveen Nayak BhukyaNo ratings yet
- Wireless Power Transmission Via Solar Power SatelliteDocument24 pagesWireless Power Transmission Via Solar Power SatellitePraveen Nayak BhukyaNo ratings yet
- Current Contribution From Wind Farms For 3 Phase Fault in The GridDocument23 pagesCurrent Contribution From Wind Farms For 3 Phase Fault in The GridPraveen Nayak BhukyaNo ratings yet
- Seminar On Wireless Power Transmission Via Solar Power SatelliteDocument24 pagesSeminar On Wireless Power Transmission Via Solar Power SatellitePraveen Nayak BhukyaNo ratings yet
- Vol Stability SlidesDocument28 pagesVol Stability SlidesPraveen Nayak BhukyaNo ratings yet
- Five Phase Brushless DC Machine Direct Drive SysteDocument10 pagesFive Phase Brushless DC Machine Direct Drive SystePraveen Nayak BhukyaNo ratings yet
- Shipham Special Alloy ValvesDocument62 pagesShipham Special Alloy ValvesYogi173No ratings yet
- Red Hat Jboss Enterprise Application Platform 7.1: Getting Started GuideDocument61 pagesRed Hat Jboss Enterprise Application Platform 7.1: Getting Started Guidesomanath padhyNo ratings yet
- Brochure Siemens Mobilett XP Digital Xray EBA AG2Document8 pagesBrochure Siemens Mobilett XP Digital Xray EBA AG2Alhasn AlmerabyNo ratings yet
- ASBA V State Petition For Transfer FINALDocument13 pagesASBA V State Petition For Transfer FINALKTARNo ratings yet
- Koolaire - A KDT Manual PDFDocument192 pagesKoolaire - A KDT Manual PDFjulioNo ratings yet
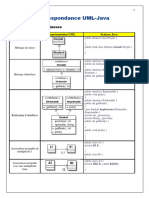
- 8 - Correspondance UML-JAVADocument3 pages8 - Correspondance UML-JAVAoussama sfiriNo ratings yet
- Institute of Cost and Management Accountants of Pakistan: Employment Application FormDocument2 pagesInstitute of Cost and Management Accountants of Pakistan: Employment Application FormRashidAliNo ratings yet
- Emd-Mi927 IntercoolerDocument8 pagesEmd-Mi927 IntercoolerVictor Raul Tobosque MuñozNo ratings yet
- PNP ACG - Understanding Digital ForensicsDocument76 pagesPNP ACG - Understanding Digital ForensicsTin TinNo ratings yet
- Parallel SerialDocument12 pagesParallel SerialjuampicNo ratings yet
- Basic Grooming For Men and WomenDocument2 pagesBasic Grooming For Men and WomenJohn Ernest Grana50% (2)
- A 200 Word Essay OnDocument9 pagesA 200 Word Essay OnANANDRAJ HARIHARANNo ratings yet
- Amasicon Trade BrochureDocument6 pagesAmasicon Trade BrochureShantanu Saha SaniNo ratings yet
- Manulife Smart Call Call MenuDocument1 pageManulife Smart Call Call MenuNazreen AmirdeenNo ratings yet
- Allie Brown: Southern Paws Pet Grooming, Cordele, GA. - BatherDocument2 pagesAllie Brown: Southern Paws Pet Grooming, Cordele, GA. - Batherapi-548153301No ratings yet
- BCG GE McKinsey MatrixDocument22 pagesBCG GE McKinsey MatrixAthmanath SR KrishnanNo ratings yet
- Macquarie University:: 1.) Musec SchoolDocument6 pagesMacquarie University:: 1.) Musec SchoolUtsav ShroffNo ratings yet
- Government Led Joint Assessment in Conflict Affected Districts of Xarardheere & Ceel DheerDocument9 pagesGovernment Led Joint Assessment in Conflict Affected Districts of Xarardheere & Ceel DheerBarre Moulid ShuqulNo ratings yet
- Souce Najib LeadershipDocument12 pagesSouce Najib LeadershipSharanya Ramasamy100% (1)
- Reading Assignment I: Intro To Swift: ObjectiveDocument10 pagesReading Assignment I: Intro To Swift: ObjectiveAlbert JordanNo ratings yet
- Succession DigestDocument407 pagesSuccession DigestToni Gabrielle Ang EspinaNo ratings yet
- Manual de Usuario Motor Fuera de Borda.Document68 pagesManual de Usuario Motor Fuera de Borda.Carlos GallardoNo ratings yet
- Informatica Powercenter 9.5 User GuideDocument227 pagesInformatica Powercenter 9.5 User GuideLaukik Khopkar100% (1)
- Zxy 110 DatasheetDocument2 pagesZxy 110 DatasheetitembolehNo ratings yet
- Marketing Plan of AirconDocument16 pagesMarketing Plan of AirconJewel Virata100% (1)
- Portfolio AnswersDocument4 pagesPortfolio Answersa73609No ratings yet