Download as ppt, pdf, or txt
You might also like
- Patty Brennan Homeopathic GuideDocument54 pagesPatty Brennan Homeopathic Guidepawajee50% (2)
- Hvac PM Service Checklist ContractorDocument1 pageHvac PM Service Checklist Contractorudupiganesh3069100% (2)
- Afar 2 - Summative Test (Consolidated) Theories: Realized in The Second Year From Upstream Sales Made in Both YearsDocument23 pagesAfar 2 - Summative Test (Consolidated) Theories: Realized in The Second Year From Upstream Sales Made in Both YearsVon Andrei Medina100% (1)
- Intermediate Steps To Understanding PDFDocument36 pagesIntermediate Steps To Understanding PDFVal Ribeiro79% (34)
- CDC2004Document6 pagesCDC2004Gourab DebnathNo ratings yet
- Li Rui Chek 2014Document25 pagesLi Rui Chek 2014Abdessamed BelhadjNo ratings yet
- Human Tracking System Based On PIR Sensor Network and Video: Ji Xiong, Fang-Min Li and Jing-Yuan ZhangDocument14 pagesHuman Tracking System Based On PIR Sensor Network and Video: Ji Xiong, Fang-Min Li and Jing-Yuan ZhangLuis SantosNo ratings yet
- Zhang 2020Document5 pagesZhang 2020Ms. Divya KonikkaraNo ratings yet
- MotionBERT - A Unified Perspective On Learning Human Motion RepresentationsDocument18 pagesMotionBERT - A Unified Perspective On Learning Human Motion Representationslinzhongyan.foxNo ratings yet
- Hand Gesture RecognisationDocument3 pagesHand Gesture RecognisationJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Development of A Stereo Vision Measurement Architecture For An Underwater RobotDocument4 pagesDevelopment of A Stereo Vision Measurement Architecture For An Underwater RobotCarlos Humberto LlanosNo ratings yet
- VPI Player: An Approach For Virtual Percussion Instrument Using KinectDocument4 pagesVPI Player: An Approach For Virtual Percussion Instrument Using KinectInnovative Research PublicationsNo ratings yet
- Opto-Digital Methods For Image Processing and Three-Dimensional ScanningDocument1 pageOpto-Digital Methods For Image Processing and Three-Dimensional ScanningRigoberto Juarez SalazarNo ratings yet
- Invest IndiaDocument1 pageInvest IndiaKhushi BerryNo ratings yet
- Generic 113Document6 pagesGeneric 113Rishi NadhNo ratings yet
- A Magnetic Resonance Coupling Based Touchless Pad For Human-Computer InterfacingDocument5 pagesA Magnetic Resonance Coupling Based Touchless Pad For Human-Computer InterfacingMadduluri Ananth BharadwajNo ratings yet
- Realistic Simulation of Real-Time Embedded Systems - EPFLDocument44 pagesRealistic Simulation of Real-Time Embedded Systems - EPFLKhoa NguyenNo ratings yet
- HCI Gesture Feature Capture and Recognition in VRDocument7 pagesHCI Gesture Feature Capture and Recognition in VRrum kaunNo ratings yet
- Human Motion Detection in Manufacturing Process: Ágnes Lipovits, Mónika Gál, Péter József Kiss, Csaba SüvegesDocument8 pagesHuman Motion Detection in Manufacturing Process: Ágnes Lipovits, Mónika Gál, Péter József Kiss, Csaba SüvegesFarid MukhtarNo ratings yet
- Hand Gesture: For Human Machine InteractionDocument2 pagesHand Gesture: For Human Machine InteractionThanniru VenkateshNo ratings yet
- Cappelli - Using Synthetic Data To Evaluate The Quality of Minutiae Extraction AlgorithmsDocument19 pagesCappelli - Using Synthetic Data To Evaluate The Quality of Minutiae Extraction AlgorithmsRonildo OliveiraNo ratings yet
- Analyzing The Performance of Sentiment Analysis Using BERT DistilBERT and RoBERTaDocument6 pagesAnalyzing The Performance of Sentiment Analysis Using BERT DistilBERT and RoBERTaSaad TayefNo ratings yet
- Spie93 Fingerprint (FBI FNGRPRNT CMPRSSNDocument12 pagesSpie93 Fingerprint (FBI FNGRPRNT CMPRSSNNafis FaisalNo ratings yet
- 3D Hand Gesture Recognition Based On Sensor Fusion of Commodity HardwareDocument10 pages3D Hand Gesture Recognition Based On Sensor Fusion of Commodity HardwarechfakhtNo ratings yet
- Deloitte 1674463301Document83 pagesDeloitte 1674463301itzmymark2011No ratings yet
- 德勤全球技术趋势2023Document83 pages德勤全球技术趋势2023namhaidNo ratings yet
- Sensors: Research On A Handheld 3D Laser Scanning System For Measuring Large-Sized ObjectsDocument18 pagesSensors: Research On A Handheld 3D Laser Scanning System For Measuring Large-Sized Objectsvctorvargas9383No ratings yet
- Human Hand Gesture Recognition Using A Convolution Neural NetworkDocument7 pagesHuman Hand Gesture Recognition Using A Convolution Neural NetworkVeda GorrepatiNo ratings yet
- Automatic Robot Hand-Eye Calibration Enabled by Learning-Based 3D VisionDocument24 pagesAutomatic Robot Hand-Eye Calibration Enabled by Learning-Based 3D VisionAFTABNo ratings yet
- 1 s2.0 S1877050918308196 MainDocument7 pages1 s2.0 S1877050918308196 Mainfadly fian95No ratings yet
- Inertia: Matter VelocityDocument4 pagesInertia: Matter VelocityMitch-ChedyLanoriaNo ratings yet
- SSRN Id4359350Document21 pagesSSRN Id4359350YAOZHONG ZHANGNo ratings yet
- Visual Control of A Robotic HandDocument7 pagesVisual Control of A Robotic HandZiadelkNo ratings yet
- Mechanical Arm Teleoperation Control System by Dynamic Hand Gesture Recognition Based PDFDocument4 pagesMechanical Arm Teleoperation Control System by Dynamic Hand Gesture Recognition Based PDFIvan AvramovNo ratings yet
- Deep Learning Implementation of Self Driving Car: 15BCE0205 (Radhika Garodia) 15BCE0311 (Kanav Sethi)Document11 pagesDeep Learning Implementation of Self Driving Car: 15BCE0205 (Radhika Garodia) 15BCE0311 (Kanav Sethi)Gunjan KhutNo ratings yet
- Vehicle Lateral Dynamics Estimation Using Unknown Input Observer Vehicle Lateral Dynamics Estimation Using Unknown Input ObserverDocument10 pagesVehicle Lateral Dynamics Estimation Using Unknown Input Observer Vehicle Lateral Dynamics Estimation Using Unknown Input ObserverNELY FALNo ratings yet
- A Framework For 3D Spatial Gesture Design and Modeling Using A Wearable Input DeviceDocument4 pagesA Framework For 3D Spatial Gesture Design and Modeling Using A Wearable Input DeviceDongchen LuNo ratings yet
- Real-Time Face Tracking System For Human-Robot Interact IonDocument6 pagesReal-Time Face Tracking System For Human-Robot Interact IonSAGAR JHA 14BEC1074No ratings yet
- Realistic Simulation of RealTime Embedded SystemsDocument42 pagesRealistic Simulation of RealTime Embedded SystemsKhoa NguyenNo ratings yet
- Enabling Smart Vision Uisng MetasurfaceDocument10 pagesEnabling Smart Vision Uisng Metasurfacearjunpr66tNo ratings yet
- Ifm Catalogue Control Systems GB 09Document212 pagesIfm Catalogue Control Systems GB 09ifm electronic100% (2)
- 224&721 Rev1 CapstoneDocument17 pages224&721 Rev1 CapstoneNavin RsNo ratings yet
- 5406 14359 1 PBDocument8 pages5406 14359 1 PBJhon Carl Pacatang AñidesNo ratings yet
- Advanced Analysis of Satellite Imagery Using Python: Hong Xu, Kaixi ZhangDocument24 pagesAdvanced Analysis of Satellite Imagery Using Python: Hong Xu, Kaixi ZhangPrabha MishraNo ratings yet
- 224&721 Rev2 CapstoneDocument25 pages224&721 Rev2 CapstoneNavin RsNo ratings yet
- A Novel Approach of Sentiment Classification Using - 2018 - Procedia Computer SCDocument10 pagesA Novel Approach of Sentiment Classification Using - 2018 - Procedia Computer SC220010044No ratings yet
- The Logic of ModellingDocument35 pagesThe Logic of ModellingBabita ThakurNo ratings yet
- A Data Glove Is A GloveDocument1 pageA Data Glove Is A GloveYhenew AddisNo ratings yet
- GP 2Document13 pagesGP 2asdNo ratings yet
- Laser Scanning Intensive CourseDocument56 pagesLaser Scanning Intensive CourseVolodymyr TarnavskyyNo ratings yet
- Vision Based Environment Recognition and Movement Control For Autonomous Wheeled Mobile RobotsDocument6 pagesVision Based Environment Recognition and Movement Control For Autonomous Wheeled Mobile RobotsMuhammad RenaldyNo ratings yet
- Online Edition - Digital AccessDocument1 pageOnline Edition - Digital AccessbitbtihbyobutNo ratings yet
- NTB1216Document90 pagesNTB1216Wei QuanNo ratings yet
- OutputDocument2 pagesOutputabhishek509.pNo ratings yet
- MVN Tech WhitepaperDocument7 pagesMVN Tech WhitepaperJuan Ignacio Guerrero HenríquezNo ratings yet
- Ulotka - VR - ENG 1Document2 pagesUlotka - VR - ENG 1Roman PutanowiczNo ratings yet
- Bull Name Is GivenDocument13 pagesBull Name Is GivenPrateek Kumar PandeyNo ratings yet
- STC RudraDocument26 pagesSTC Rudrarudra.pvt.afNo ratings yet
- Calibration-Free Augmented Reality: Kiriakos N. Kutulakos James R. VallinoDocument42 pagesCalibration-Free Augmented Reality: Kiriakos N. Kutulakos James R. VallinoMahmoud salahNo ratings yet
- A Robust Static Hand Gesture RecognitionDocument18 pagesA Robust Static Hand Gesture RecognitionKonda ChanduNo ratings yet
- Gesture RecognitionDocument4 pagesGesture Recognitioneshwari2000No ratings yet
- 1983 - TANIGUSH - Future Trends Of, Ultraprecision Ultrafine PDFDocument10 pages1983 - TANIGUSH - Future Trends Of, Ultraprecision Ultrafine PDFLaís NorcinoNo ratings yet
- Brain Wave Controlled Robotic Arm: Yeshas Y, Lekha H. P, Belli Praveen, Jayaprakash H B, Puneeth H JDocument4 pagesBrain Wave Controlled Robotic Arm: Yeshas Y, Lekha H. P, Belli Praveen, Jayaprakash H B, Puneeth H JRishpNo ratings yet
- Articulated Body Pose Estimation: Unlocking Human Motion in Computer VisionFrom EverandArticulated Body Pose Estimation: Unlocking Human Motion in Computer VisionNo ratings yet
- Elements of SCRUM in Student Robotics ProjectDocument10 pagesElements of SCRUM in Student Robotics ProjectAbel Varghese DavidNo ratings yet
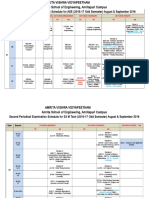
- Time Table - Second PeriodicalDocument2 pagesTime Table - Second PeriodicalAbel Varghese DavidNo ratings yet
- RA 725: Haptic Interfaces: Jose JamesDocument15 pagesRA 725: Haptic Interfaces: Jose JamesAbel Varghese DavidNo ratings yet
- Elementary AlgorithmsDocument622 pagesElementary AlgorithmsAbel Varghese DavidNo ratings yet
- M Tech S3 TTDocument2 pagesM Tech S3 TTAbel Varghese DavidNo ratings yet
- Gitex Floorplan New v3Document1 pageGitex Floorplan New v3Abel Varghese DavidNo ratings yet
- Three-Dimensional Localization and Mapping For Mobile Robot in Disaster EnvironmentsDocument7 pagesThree-Dimensional Localization and Mapping For Mobile Robot in Disaster EnvironmentsAbel Varghese DavidNo ratings yet
- Mobile Robots and Autonomous VehiclesDocument2 pagesMobile Robots and Autonomous VehiclesAbel Varghese DavidNo ratings yet
- PR Intro Motor Selection Training FINAL KWDocument2 pagesPR Intro Motor Selection Training FINAL KWAbel Varghese DavidNo ratings yet
- Automated Contaminated Soil Site MonitoringDocument1 pageAutomated Contaminated Soil Site MonitoringAbel Varghese DavidNo ratings yet
- Planner For ProjectsDocument3 pagesPlanner For ProjectsAbel Varghese DavidNo ratings yet
- Proposal For Minor Project: Project Title: Search & Recuse Using HuskyDocument1 pageProposal For Minor Project: Project Title: Search & Recuse Using HuskyAbel Varghese DavidNo ratings yet
- Lesson Plan 8 (September) (AutoRecovered) 1Document3 pagesLesson Plan 8 (September) (AutoRecovered) 1Rutchie AbantoNo ratings yet
- Decision Trees and Boosting: Helge Voss (MPI-K, Heidelberg) TMVA WorkshopDocument30 pagesDecision Trees and Boosting: Helge Voss (MPI-K, Heidelberg) TMVA WorkshopAshish TiwariNo ratings yet
- Bydf3 ElectricDocument61 pagesBydf3 ElectricIvan Avila100% (1)
- BDM SF 3 6LPA 2ndlisDocument20 pagesBDM SF 3 6LPA 2ndlisAvi VatsaNo ratings yet
- Exam 4H Rev Ques PDFDocument44 pagesExam 4H Rev Ques PDFRuchi OjhaNo ratings yet
- UntitledDocument2 pagesUntitledelleNo ratings yet
- Tivoli Storage Manager Operational Reporting Installation, Configuration and CustomizationDocument53 pagesTivoli Storage Manager Operational Reporting Installation, Configuration and CustomizationSABRINE KHNo ratings yet
- Module - 1 IntroductionDocument33 pagesModule - 1 IntroductionIffat SiddiqueNo ratings yet
- Comfort ZoneDocument4 pagesComfort Zonesigal ardanNo ratings yet
- Cell Structure & Cell OrganisationDocument35 pagesCell Structure & Cell OrganisationNaida Mohd SalehNo ratings yet
- TakeawayDocument6 pagesTakeawayWilman VasquezNo ratings yet
- Assessment System: Take Assessment - EWAN Chapter 8 - CCNA Exploration: Accessing The WAN (Version 4.0)Document9 pagesAssessment System: Take Assessment - EWAN Chapter 8 - CCNA Exploration: Accessing The WAN (Version 4.0)asceric4363No ratings yet
- Factory Physics PrinciplesDocument20 pagesFactory Physics Principlespramit04100% (1)
- CEA Farms Logistics USA Slide Deck (2023!10!31 10-38-56 UTC)Document18 pagesCEA Farms Logistics USA Slide Deck (2023!10!31 10-38-56 UTC)SiyabongaNo ratings yet
- Federal University OtuokeDocument5 pagesFederal University OtuokeeteleruthNo ratings yet
- Quiz For Western Lit.Document25 pagesQuiz For Western Lit.donnie4workingNo ratings yet
- Neuro TR Brochure - EN CompressedDocument8 pagesNeuro TR Brochure - EN CompressedJanam KuNo ratings yet
- Adam Weeks ResumeDocument3 pagesAdam Weeks ResumeAdam WeeksNo ratings yet
- 11a - Advanced - Turkish Grammar - NotesDocument79 pages11a - Advanced - Turkish Grammar - Notesfardousa ibNo ratings yet
- Nissan Sentra ECMDocument11 pagesNissan Sentra ECMSalvador Manuel Rocha CastilloNo ratings yet
- ECDIS JRC JAN-7201-9201 Instruct Manual BasicDocument294 pagesECDIS JRC JAN-7201-9201 Instruct Manual BasicRanjeet singhNo ratings yet
- RCHAPAC1 Eng 01 307567465Document2 pagesRCHAPAC1 Eng 01 307567465Hmg HamidiNo ratings yet
- Comunica CaoDocument5 pagesComunica Caosh3ll.sh4d0wNo ratings yet
- Teleprotection Equipment ManualDocument71 pagesTeleprotection Equipment ManualThạch TháiNo ratings yet
- Natural Gas - Pipe SizingDocument6 pagesNatural Gas - Pipe SizinglekakasNo ratings yet
- Dezvoltare Sustenabila in Zonele RuraleDocument20 pagesDezvoltare Sustenabila in Zonele RuraleAdrian BuțaNo ratings yet