Download as ppt, pdf, or txt
You might also like
- Ch6 Evans BA1e Case SolutionDocument30 pagesCh6 Evans BA1e Case Solutionyarli77770% (1)
- LdoDocument17 pagesLdoKAMARUDHEEN KPNo ratings yet
- Fully Differential CMOS Voltage AmplifierDocument16 pagesFully Differential CMOS Voltage AmplifierAjit Narwal0% (1)
- Level Shifter PDFDocument6 pagesLevel Shifter PDFKAMARUDHEEN KP100% (1)
- Design of A Single Ended Two Stage Opamp Using 90Nm Cmos GPDK TechnologyDocument8 pagesDesign of A Single Ended Two Stage Opamp Using 90Nm Cmos GPDK Technologygill6335100% (1)
- p13 - Behavioral Modeling of LDO PDFDocument10 pagesp13 - Behavioral Modeling of LDO PDFTitan FredNo ratings yet
- LDO-IEEE SSCS Chapter PDFDocument47 pagesLDO-IEEE SSCS Chapter PDFBai Nguyen NoiNo ratings yet
- Analysis and Design LDODocument32 pagesAnalysis and Design LDONguyễn ThắngNo ratings yet
- IEEE - Cascoded OTA Based LDODocument5 pagesIEEE - Cascoded OTA Based LDORajatNo ratings yet
- Module 2: MOSFET Lecture 4: MOS Capacitor: ObjectivesDocument4 pagesModule 2: MOSFET Lecture 4: MOS Capacitor: ObjectivesAruna ManiNo ratings yet
- ADI - Understand Low Dropout Regulator (LDO) Concepts To Achieve Optimal Designs PDFDocument6 pagesADI - Understand Low Dropout Regulator (LDO) Concepts To Achieve Optimal Designs PDFhectcandNo ratings yet
- Design Analysis of Low Drop-Out Voltage Regulator With Current Buffer CompensationDocument5 pagesDesign Analysis of Low Drop-Out Voltage Regulator With Current Buffer Compensationkhang npNo ratings yet
- VLSI-5 Short Channel Effects PDFDocument9 pagesVLSI-5 Short Channel Effects PDFPranay KinraNo ratings yet
- Ti Ldo PresentationDocument22 pagesTi Ldo PresentationDebolina GhoshNo ratings yet
- Data Converter FundamentalsDocument27 pagesData Converter FundamentalstkbattulaNo ratings yet
- Design of A Low Drop-Out Voltage Regulator For Soc Applications in A 130Nm Cmos TechnologyDocument20 pagesDesign of A Low Drop-Out Voltage Regulator For Soc Applications in A 130Nm Cmos TechnologyLaude FernándezNo ratings yet
- Ee101 Opamp 1Document85 pagesEe101 Opamp 1Ankur SinghNo ratings yet
- C3.0 Operational Amplifiers II: Jeng-Han TsaiDocument12 pagesC3.0 Operational Amplifiers II: Jeng-Han Tsailinux14No ratings yet
- Ecen 607 CMFB-2011Document44 pagesEcen 607 CMFB-2011Girish K NathNo ratings yet
- PMOS, NMOS and CMOS Transmission Gate Characteristics.Document13 pagesPMOS, NMOS and CMOS Transmission Gate Characteristics.Prajwal KhairnarNo ratings yet
- Igital Elay Ocked OOP Esign: Yun Lan ECG 721 11/18/2015Document29 pagesIgital Elay Ocked OOP Esign: Yun Lan ECG 721 11/18/2015Meshcheryakov SlavaNo ratings yet
- Chapter 7. Switched-Inductor Regulators With Design Insight and Intuition (Power IC Design)Document119 pagesChapter 7. Switched-Inductor Regulators With Design Insight and Intuition (Power IC Design)Minh Hai RungNo ratings yet
- Milliken Thesis Ldo Differentiator PDFDocument106 pagesMilliken Thesis Ldo Differentiator PDFkijiji userNo ratings yet
- Presentation On Second Order Effects and Short Channel EffectsDocument23 pagesPresentation On Second Order Effects and Short Channel Effectsmaheshwarivikas1982No ratings yet
- VLSI I - V CharacteristicsDocument46 pagesVLSI I - V CharacteristicsMALATHI .LNo ratings yet
- Lec 3 MOSFET IDocument37 pagesLec 3 MOSFET Ikrishna_ScrbidNo ratings yet
- mOS PDFDocument48 pagesmOS PDFDebasish KerrNo ratings yet
- Advanced Current Mirrors and Opamps: Hossein ShamsiDocument45 pagesAdvanced Current Mirrors and Opamps: Hossein ShamsiChristian Montano GalvezNo ratings yet
- Band Gap ReferencesDocument115 pagesBand Gap ReferencesNam Luu Nguyen NhatNo ratings yet
- CML To Cmos 2Document4 pagesCML To Cmos 2Zyad IskandarNo ratings yet
- E3-327 (3) - M SOI MOSFET Oct 2013Document56 pagesE3-327 (3) - M SOI MOSFET Oct 2013Tara VishinNo ratings yet
- Ec8353electronicdevicesandcircuitsunit2 180711152109Document126 pagesEc8353electronicdevicesandcircuitsunit2 180711152109dhivyaNo ratings yet
- Diod RectifierDocument35 pagesDiod RectifierRizalNo ratings yet
- A CMOS Bandgap Reference Circuit With Sub-1V OperationDocument5 pagesA CMOS Bandgap Reference Circuit With Sub-1V Operationbooky_mookyNo ratings yet
- Two Stage CompensationDocument26 pagesTwo Stage CompensationIndranil SarkarNo ratings yet
- Analysis of Sense Amplifier Circuit Used in High Performance & Low Power SramDocument5 pagesAnalysis of Sense Amplifier Circuit Used in High Performance & Low Power SramGJESRNo ratings yet
- Bias Circuits For RF DevicesDocument20 pagesBias Circuits For RF Devicesmaheshsamanapally100% (1)
- Understanding Synchronous Fifos: Author: Cypress Associated Part FamilyDocument10 pagesUnderstanding Synchronous Fifos: Author: Cypress Associated Part FamilySainadh YerrapragadaNo ratings yet
- CMOS Translinear CellsDocument4 pagesCMOS Translinear CellsSumitChoudharyNo ratings yet
- VLSI Notes 1 PDFDocument305 pagesVLSI Notes 1 PDFKishore KumarNo ratings yet
- Topic 3 - RF Power Measurement, KeysightDocument77 pagesTopic 3 - RF Power Measurement, KeysightYolandaIbáñezNo ratings yet
- Basic Electrical Properties of MOSDocument13 pagesBasic Electrical Properties of MOSSai Puneeth Theja A.S100% (1)
- Chip IO Circuit Design - IO Buffers Design in IC CommunicationsDocument84 pagesChip IO Circuit Design - IO Buffers Design in IC CommunicationsVăn CôngNo ratings yet
- Bandgap ReferencesDocument18 pagesBandgap ReferenceskumarbsnspNo ratings yet
- Analog-To-Digital Conversion Btech IIIDocument50 pagesAnalog-To-Digital Conversion Btech IIILisa BhagatNo ratings yet
- 10 DC-DC Buck ConverterDocument36 pages10 DC-DC Buck ConverterAnas RajputNo ratings yet
- Tiq ComparatorDocument16 pagesTiq ComparatorKuldeep GuptaNo ratings yet
- Design of An Efficient FIFO Buffer For Network On Chip RoutersDocument4 pagesDesign of An Efficient FIFO Buffer For Network On Chip RoutersAmityUniversity IIcNo ratings yet
- University of Tun Hussien Onn MalaysiaDocument32 pagesUniversity of Tun Hussien Onn Malaysiaarcalamia100% (3)
- Design and Analysis of Low Power Bandgap Voltage ReferenceDocument8 pagesDesign and Analysis of Low Power Bandgap Voltage ReferencePraveen Kumar ReddyNo ratings yet
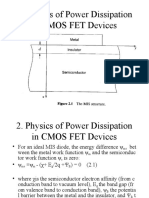
- Physics of Power Dissipation in CMOS FET DevicesDocument70 pagesPhysics of Power Dissipation in CMOS FET DevicesPunith Gowda M BNo ratings yet
- Low Voltage CMOS SAR ADC DesignDocument68 pagesLow Voltage CMOS SAR ADC DesignAyush SukaniNo ratings yet
- Current MirrorDocument13 pagesCurrent Mirrorakshaykamath123No ratings yet
- Bandgap 2009Document27 pagesBandgap 2009jjloksNo ratings yet
- Control Engineering Viva & Interview Questions: Ssasit, SuratDocument11 pagesControl Engineering Viva & Interview Questions: Ssasit, SuratMuskan JainNo ratings yet
- Design of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CDocument25 pagesDesign of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CShuaib Ahmad KhanNo ratings yet
- Two-Stage Operational Amplifier Design Using Gm/Id MethodDocument7 pagesTwo-Stage Operational Amplifier Design Using Gm/Id Methodabhinav kumarNo ratings yet
- SCR-Based ESD Protection Designs For RF ICsDocument3 pagesSCR-Based ESD Protection Designs For RF ICsjournalNo ratings yet
- Chapter 8. Reference Circuits An Intuitive Approach (Analog IC Design An Intuitive Approach)Document19 pagesChapter 8. Reference Circuits An Intuitive Approach (Analog IC Design An Intuitive Approach)Minh Hai RungNo ratings yet
- Chapter 02 Basic Concepts in RF DesignDocument110 pagesChapter 02 Basic Concepts in RF DesignBilal HabibNo ratings yet
- 607 Lect 12 LdoDocument58 pages607 Lect 12 Ldojackal1710No ratings yet
- Semiconductor Manufacturing AustriamicrosystemsDocument47 pagesSemiconductor Manufacturing Austriamicrosystemsmikeshinoda20110% (1)
- 5 - 2015 ITRS 2.0 - More MooreDocument52 pages5 - 2015 ITRS 2.0 - More Mooremikeshinoda2011No ratings yet
- MbanDocument74 pagesMbanmikeshinoda2011No ratings yet
- High-Speed Digital Test & Measurement: Chris Allen (Callen@eecs - Ku.edu)Document21 pagesHigh-Speed Digital Test & Measurement: Chris Allen (Callen@eecs - Ku.edu)mikeshinoda2011No ratings yet
- 93XX Series RTC Battery PDFDocument17 pages93XX Series RTC Battery PDFmikeshinoda2011No ratings yet
- ADCsurvey Rev20150712Document72 pagesADCsurvey Rev20150712mikeshinoda2011No ratings yet
- ME1000 RF Circuit Design Lab 4 Filter Characterization Using Vector Network AnalyzerDocument6 pagesME1000 RF Circuit Design Lab 4 Filter Characterization Using Vector Network Analyzermikeshinoda2011No ratings yet
- b16396 8Document32 pagesb16396 8mikeshinoda2011No ratings yet
- Ultra Low Power Low Dropout Voltage RegulatorDocument10 pagesUltra Low Power Low Dropout Voltage Regulatormikeshinoda2011No ratings yet
- Voltage Regulator PDFDocument6 pagesVoltage Regulator PDFSai KrishnaNo ratings yet
- 120-08 Telemetry (TM) Radio Frequency (RF) HandbookDocument133 pages120-08 Telemetry (TM) Radio Frequency (RF) Handbookviveknarula295382No ratings yet
- Unit 2 - I Input and Output v1.5Document10 pagesUnit 2 - I Input and Output v1.5Thomas MathewNo ratings yet
- Chapter - 3 - EERDDocument67 pagesChapter - 3 - EERDbui datNo ratings yet
- Discussion Muir Wood Circular Tunnel in Elastic GroundDocument7 pagesDiscussion Muir Wood Circular Tunnel in Elastic GroundAmmar SohailNo ratings yet
- Spell PVC BookDocument38 pagesSpell PVC BookAmji ShahNo ratings yet
- Electrical Transfer Switch Use, Operation, Diagram - ETechnoGDocument5 pagesElectrical Transfer Switch Use, Operation, Diagram - ETechnoGTakesure MarizaniNo ratings yet
- Pico Scope 2200 A Series Data SheetDocument11 pagesPico Scope 2200 A Series Data SheetMaheshNo ratings yet
- Of Final BookDocument197 pagesOf Final BookSachinNo ratings yet
- Fragments & Specimens or Early Latin - JOHN WORDSWORTHDocument728 pagesFragments & Specimens or Early Latin - JOHN WORDSWORTHicidsanchez100% (3)
- 2 - 6 - Practice Test REGDocument5 pages2 - 6 - Practice Test REGnuoti guanNo ratings yet
- 10 1109@ice348803 2020 9122890Document3 pages10 1109@ice348803 2020 9122890Harsh SinghNo ratings yet
- Ffmpeg FiltersDocument4 pagesFfmpeg Filtersaudinugraha87No ratings yet
- Module 5 TOSDocument8 pagesModule 5 TOSPrince IbanezNo ratings yet
- Laboratory Assignments On Experiment 5: Design of The KHN/universal Filter (High-Pass, Band-Pass and Low-Pass)Document3 pagesLaboratory Assignments On Experiment 5: Design of The KHN/universal Filter (High-Pass, Band-Pass and Low-Pass)Sanjana VermaNo ratings yet
- Logic and Critical ThinkingDocument1 pageLogic and Critical ThinkingstreetbaNo ratings yet
- Is 1079Document12 pagesIs 1079Subhajit DasNo ratings yet
- Imaging Den To Facial TraitsDocument25 pagesImaging Den To Facial TraitshaydarfadelNo ratings yet
- 03-DG-Section 3 Sewerage System Design-Version 1.0Document35 pages03-DG-Section 3 Sewerage System Design-Version 1.0Mahmood Ur Rashid100% (1)
- Complete Icecream Plant TETRA HOYERDocument17 pagesComplete Icecream Plant TETRA HOYERHugo RuizNo ratings yet
- Genetic Variability, Correlation and Path Analysis in Stem AmaranthDocument7 pagesGenetic Variability, Correlation and Path Analysis in Stem AmaranthNoman FarookNo ratings yet
- Sol Assignment4-SetTheoryDocument11 pagesSol Assignment4-SetTheoryOlan TosawakaNo ratings yet
- Buchholz RelayDocument3 pagesBuchholz Relaymayur3dhandeNo ratings yet
- The Iodine Clock Reaction TP3Document12 pagesThe Iodine Clock Reaction TP3Borith pangNo ratings yet
- 9TH SpreadsheetDocument11 pages9TH SpreadsheetClumsy ManNo ratings yet
- PHD Thesis Machine LearningDocument8 pagesPHD Thesis Machine Learningtygocixff100% (1)
- CC1 8Document4 pagesCC1 8Joshua Trinidad0% (1)
- EnGenius AP Configuration Best PracticesDocument8 pagesEnGenius AP Configuration Best PracticesMariano SanchezNo ratings yet
- Cube RotationDocument3 pagesCube RotationHittu PrasadNo ratings yet
- Nauticus Hull - Steel Plates UnstiffenedDocument90 pagesNauticus Hull - Steel Plates Unstiffenedbosskoj100% (1)
- FT MeterDocument5 pagesFT MeterlimazulusNo ratings yet