Download as pptx, pdf, or txt
You might also like
- Intro To Plastic Injection Molding EbookDocument43 pagesIntro To Plastic Injection Molding EbookJames Farrugia78% (9)
- MEE 312 Lecture Notes - Balancing of MachineryDocument12 pagesMEE 312 Lecture Notes - Balancing of MachineryMillstone illuminator100% (1)
- How To Calculate IMEPDocument9 pagesHow To Calculate IMEPpramodNo ratings yet
- The 2 Stroke Diesel CycleDocument14 pagesThe 2 Stroke Diesel CycleBharatiyulam100% (1)
- L10 - Balancing of Single-Cylinder EnginesDocument10 pagesL10 - Balancing of Single-Cylinder EnginesOmaroMohsenNo ratings yet
- Duke XC SL Race ServiceDocument10 pagesDuke XC SL Race ServicesilverapeNo ratings yet
- Francis - Engine Dynamics and Structural VibrationDocument19 pagesFrancis - Engine Dynamics and Structural VibrationPankajBhamareNo ratings yet
- Southern Marine Engineering Desk Reference: Second Edition Volume IiFrom EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiNo ratings yet
- MT Jan-Feb 08 Engine BalancingDocument6 pagesMT Jan-Feb 08 Engine BalancingTony Foale100% (1)
- Crankshaft Torsion and Dampers PDFDocument9 pagesCrankshaft Torsion and Dampers PDFjeyaselvanm100% (1)
- Balancing of Rotating MassesDocument8 pagesBalancing of Rotating Massesraajeeradha@gmail.com100% (2)
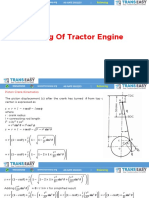
- Balancing of Tractor EngineDocument17 pagesBalancing of Tractor EngineManish ChoudharyNo ratings yet
- Balancing of Rotating Masses-FinalDocument5 pagesBalancing of Rotating Masses-FinalKasun WijethungaNo ratings yet
- 1 STAGES of Combustion in CI EngineDocument22 pages1 STAGES of Combustion in CI Engineselvaraj9223No ratings yet
- Belt DrivesDocument35 pagesBelt Drives222Gaurav AherNo ratings yet
- C. Kalavrytinos - Dynamics Analysis of A Three Cylinder EngineDocument24 pagesC. Kalavrytinos - Dynamics Analysis of A Three Cylinder EngineChristos Kalavrytinos100% (4)
- Stress Analysis of Piston Using Pressure Load and Thermal LoadDocument8 pagesStress Analysis of Piston Using Pressure Load and Thermal LoadInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- CI Engine CombustionDocument14 pagesCI Engine CombustionRahul MeenaNo ratings yet
- Engine BalanceDocument21 pagesEngine BalancefazzlieNo ratings yet
- Mechanical Engineering Dynamics of Machines Balancing of Rotating Masses NotesDocument46 pagesMechanical Engineering Dynamics of Machines Balancing of Rotating Masses NotesRajibNo ratings yet
- Signature AnalysisDocument49 pagesSignature AnalysisVirgilio100% (1)
- Automobile Engineering - Automobile Electric SystemsDocument20 pagesAutomobile Engineering - Automobile Electric SystemsAhmed Zawad ShovonNo ratings yet
- CrankshaftDocument126 pagesCrankshaftRishab Sharma100% (1)
- Aemr Two MarksDocument11 pagesAemr Two MarksRajashree VenugopalNo ratings yet
- Engine BalancingDocument4 pagesEngine BalancingNauryzbek Bekpembetov100% (1)
- Thermo FuelsDocument12 pagesThermo FuelsBea Daniella CuaresmaNo ratings yet
- Crankshaft Torsional Vibration ReferenceDocument3 pagesCrankshaft Torsional Vibration ReferenceSakthiVel RamuNo ratings yet
- Dynamic Balancing of Centrifugal Pump ImpellerDocument5 pagesDynamic Balancing of Centrifugal Pump ImpellerChoochart Thongnark100% (1)
- Dynamic Balancing ReportDocument15 pagesDynamic Balancing ReportJaren Gan100% (3)
- Ic Engine QuestionsDocument88 pagesIc Engine QuestionsSUBHNo ratings yet
- What Is The Difference Between Low Speed Balancing and Dynamic Balancing in Turbine Rotor PerspectiveDocument10 pagesWhat Is The Difference Between Low Speed Balancing and Dynamic Balancing in Turbine Rotor Perspectiveabdulyunus_amir100% (1)
- Balancing of Rotating MachineryDocument38 pagesBalancing of Rotating MachineryThomas AbrahamNo ratings yet
- Diesel Engine Combustion ProcessDocument8 pagesDiesel Engine Combustion Processvmike63100% (1)
- 8 Ways To Monitor and Measure Marine Engine PerformanceDocument3 pages8 Ways To Monitor and Measure Marine Engine PerformanceDwein Ocampo AguilarNo ratings yet
- How To Improve Internal Combustion Engine EfficiencyDocument8 pagesHow To Improve Internal Combustion Engine EfficiencyJakob LarssonNo ratings yet
- Balancing of Crankshaft of Four Cylinder Engine, Dynamics of Machine, Ratnesh Raman Pathak, LpuDocument36 pagesBalancing of Crankshaft of Four Cylinder Engine, Dynamics of Machine, Ratnesh Raman Pathak, LpuRatnesh Raman PathakNo ratings yet
- Case Study Tuning Out Difficult Torsional Vibration ProblemDocument15 pagesCase Study Tuning Out Difficult Torsional Vibration Problempathakshashank100% (1)
- 03lubrication and CoolingDocument46 pages03lubrication and Coolingjohnvchristy7No ratings yet
- Advanced Ic Engine Full Notes EditedDocument200 pagesAdvanced Ic Engine Full Notes EditedVenugopal Mahalingam100% (4)
- ISO 10816 6 1995 en PreviewDocument5 pagesISO 10816 6 1995 en Previewblacx_rzkyNo ratings yet
- Structural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyDocument3 pagesStructural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyInnovative Research PublicationsNo ratings yet
- 1) Effect of Engine Speed On Intake Valve Flow Characteristics of A Diesel EngineDocument6 pages1) Effect of Engine Speed On Intake Valve Flow Characteristics of A Diesel EnginefitriasyrafNo ratings yet
- Green Engine PPT 2Document23 pagesGreen Engine PPT 2asra tabassumNo ratings yet
- Engine BalancingDocument77 pagesEngine BalancingSameer SonuNo ratings yet
- Hydrodynamic or Full Fluid Film LubricationDocument59 pagesHydrodynamic or Full Fluid Film LubricationAbhishek Singh ChauhanNo ratings yet
- Engine BalancingDocument31 pagesEngine BalancingSamir AlshaarNo ratings yet
- Description: Necessity of Turbocharger and SuperchargerDocument16 pagesDescription: Necessity of Turbocharger and SuperchargerNazrul Aizat ZunaidiNo ratings yet
- Review of Rotor Balancing MethodsDocument16 pagesReview of Rotor Balancing MethodsFallo SusiloNo ratings yet
- Wankel EngineDocument15 pagesWankel EngineMuhammad Bin RiazNo ratings yet
- What Is EngineDocument25 pagesWhat Is EngineSajib Chandra RoyNo ratings yet
- Internal Combustion Engine: Course No: M02-052 Credit: 2 PDHDocument24 pagesInternal Combustion Engine: Course No: M02-052 Credit: 2 PDHdoxoNo ratings yet
- Gearbox Health Condition Monitoring A Brief ExpositionDocument11 pagesGearbox Health Condition Monitoring A Brief ExpositionSetti SureshNo ratings yet
- Exhaust Gas RecirculationDocument12 pagesExhaust Gas RecirculationPriyank GabaNo ratings yet
- Journal Bearing DesignDocument94 pagesJournal Bearing DesignRamkumar P100% (2)
- Engine Performance Study GuideDocument34 pagesEngine Performance Study GuideJean R. Desir100% (1)
- Gears and TransmissionsDocument27 pagesGears and TransmissionsAshish ChaturvediNo ratings yet
- Electric Motor Asset ManagementDocument12 pagesElectric Motor Asset ManagementmelanitisNo ratings yet
- AT6602 - Chassis Component DesignDocument14 pagesAT6602 - Chassis Component Designpavanrane100% (3)
- Assignment 2Document4 pagesAssignment 2Durai SivamNo ratings yet
- Balancing of Reciprocating 2023Document57 pagesBalancing of Reciprocating 2023polygatoneoderaNo ratings yet
- Adobe Scan 09 Mar 2024Document5 pagesAdobe Scan 09 Mar 2024mevenkatesanNo ratings yet
- Adobe Scan 09 Mar 2024Document6 pagesAdobe Scan 09 Mar 2024mevenkatesanNo ratings yet
- Math Practice WorksheetDocument2 pagesMath Practice WorksheetmevenkatesanNo ratings yet
- SQL GuideDocument16 pagesSQL GuidemevenkatesanNo ratings yet
- Curiculum Vitae JurnalisDocument1 pageCuriculum Vitae JurnalisEh Ada UjankNo ratings yet
- List Product YellowDocument10 pagesList Product YellowfitriNo ratings yet
- 電容器絕緣油BDV 黏度 - SAS 40EDocument10 pages電容器絕緣油BDV 黏度 - SAS 40EShihlinElectricNo ratings yet
- Frampton AntithesispedagogyDocument2 pagesFrampton AntithesispedagogyJohann WieseNo ratings yet
- A Study of Language Maintenance and Shift in The Sylheti Community in LeedsDocument405 pagesA Study of Language Maintenance and Shift in The Sylheti Community in Leedsstore1024gbNo ratings yet
- Job Posting Groups ListDocument3 pagesJob Posting Groups ListShrutika singhNo ratings yet
- RFQ-97 For Supply of Biscuit & Soap-2Document1 pageRFQ-97 For Supply of Biscuit & Soap-2Prodip Debnath NayanNo ratings yet
- Anullment CATHOLIC TRIBUNALDocument20 pagesAnullment CATHOLIC TRIBUNALMons Jr BaturianoNo ratings yet
- Grade 7 Quizzes q1w7Document2 pagesGrade 7 Quizzes q1w7api-251197253No ratings yet
- Front Wheel Assy. DrumDocument2 pagesFront Wheel Assy. DrumSoroj BiswasNo ratings yet
- TRA2 - User ManualDocument40 pagesTRA2 - User ManualvaultedroomNo ratings yet
- Artikel 5Document26 pagesArtikel 5Surya DhNo ratings yet
- All About DVIDocument4 pagesAll About DVIperex_cuteNo ratings yet
- Astm A194Document11 pagesAstm A194Jarek CieslakNo ratings yet
- 14 Sept Quiz Chapter 1 SoalanDocument5 pages14 Sept Quiz Chapter 1 SoalanLukman MansorNo ratings yet
- 3d Internet PDFDocument3 pages3d Internet PDFSam CrazeNo ratings yet
- Strategic Management LBdA3TJvQgDocument420 pagesStrategic Management LBdA3TJvQgSazzad HossainNo ratings yet
- On Arushi Murder CaseDocument8 pagesOn Arushi Murder Case0000No ratings yet
- Noun (Subject) + Verb + The + Superlative Adjective + Noun (Object)Document6 pagesNoun (Subject) + Verb + The + Superlative Adjective + Noun (Object)anaNo ratings yet
- Flow of Communication: Emergency Response For Oil SpillageDocument5 pagesFlow of Communication: Emergency Response For Oil Spillagenarm nNo ratings yet
- Verizon Wiretapping - Comments in Support of MR Cowie's ComplaintDocument8 pagesVerizon Wiretapping - Comments in Support of MR Cowie's ComplaintireportNo ratings yet
- GE4.2 Bearing Capacity EquationsDocument66 pagesGE4.2 Bearing Capacity EquationsInter Galactic0% (1)
- F101-1 Client Information Form and ApprovalDocument4 pagesF101-1 Client Information Form and ApprovalgoyalpramodNo ratings yet
- GeoGauge - Verifier Mass GuideDocument4 pagesGeoGauge - Verifier Mass GuideOmar CarlosNo ratings yet
- Michigan Strategic Compliance Plan FINALDocument22 pagesMichigan Strategic Compliance Plan FINALbcap-oceanNo ratings yet
- Volume AdministrationDocument264 pagesVolume AdministrationeviyipyipNo ratings yet
- Heater: Hydrate PreventionDocument12 pagesHeater: Hydrate PreventionMahmoud Ahmed Ali AbdelrazikNo ratings yet
- The Relationship Between Dimensions of Love, Personality, and Relationship LengthDocument11 pagesThe Relationship Between Dimensions of Love, Personality, and Relationship LengthjuaromerNo ratings yet