Download as pptx, pdf, or txt
You might also like
- (Download PDF) Electric Circuits 10Th Edition Nilsson Online Ebook All Chapter PDFDocument42 pages(Download PDF) Electric Circuits 10Th Edition Nilsson Online Ebook All Chapter PDFmary.bruce736100% (17)
- Manual 2dDocument148 pagesManual 2dRaja Reddy100% (2)
- Lecture 1 Introduction Review of Classical ControlDocument88 pagesLecture 1 Introduction Review of Classical ControlManojkumarNo ratings yet
- Lecture 1 Introduction Review of Classical ControlDocument88 pagesLecture 1 Introduction Review of Classical ControlSiraj MohammedNo ratings yet
- Basics of Control and Simulation: Lecture 1: IntroductionDocument62 pagesBasics of Control and Simulation: Lecture 1: IntroductionMurad QəhramanovNo ratings yet
- Week 1 - L1 (B) - Classification of Control SystemDocument29 pagesWeek 1 - L1 (B) - Classification of Control SystemOlerile AnaniaNo ratings yet
- Lecture 2 Review of Classical ControlDocument68 pagesLecture 2 Review of Classical ControlMohanad Al-RekanyNo ratings yet
- Automatic Control System Lec1Document46 pagesAutomatic Control System Lec1Mohamed ElsoodyNo ratings yet
- Lecture 1 DR Mohammed Salah ControlDocument60 pagesLecture 1 DR Mohammed Salah Controlyussra amerNo ratings yet
- Chapter1 (Introduction)Document19 pagesChapter1 (Introduction)Nischal MaharjanNo ratings yet
- Lecture 1-IntroductionDocument22 pagesLecture 1-IntroductionShreyansh SaraswatNo ratings yet
- Control Systems Lect 02bDocument23 pagesControl Systems Lect 02bShadi KhanNo ratings yet
- ECE451 Lec#1Document22 pagesECE451 Lec#1Ali MohamedNo ratings yet
- Control System Analysis: Dr. Mbazingwa E. MkiramweniDocument46 pagesControl System Analysis: Dr. Mbazingwa E. MkiramweniSokoine Hamad DenisNo ratings yet
- Feedback and Control SystemsDocument33 pagesFeedback and Control SystemsJullie Mae MierNo ratings yet
- 1 Introduction To Control SystemsDocument47 pages1 Introduction To Control Systemsokay45486No ratings yet
- Control MidDocument310 pagesControl MidRIZER l رايزرNo ratings yet
- IPC Week 1 19022024 113005amDocument45 pagesIPC Week 1 19022024 113005amfatmanasir284No ratings yet
- Linear System TheoryDocument51 pagesLinear System TheorySajid KhanNo ratings yet
- AI Pertemuan 4v2Document59 pagesAI Pertemuan 4v2muhammad iqbal samudraNo ratings yet
- Advanced Optimal Control SystemsDocument49 pagesAdvanced Optimal Control SystemsTsedenia TamiruNo ratings yet
- Control Systems Week 1Document67 pagesControl Systems Week 1Mahmoud AliNo ratings yet
- EE5205 Control System DesignDocument44 pagesEE5205 Control System DesignntbandaraNo ratings yet
- Introduction To State Space Analysis: UNIT-05Document62 pagesIntroduction To State Space Analysis: UNIT-05MD SHAHRIARMAHMUDNo ratings yet
- Lecture 1 2-IntroductionDocument36 pagesLecture 1 2-Introductionjanderson13No ratings yet
- Lecture-1 Control SystemDocument44 pagesLecture-1 Control SystemKuldeep SahayNo ratings yet
- Digital Control SystemDocument11 pagesDigital Control SystemAkash A KollamparampilNo ratings yet
- Enpm808J Rehabilitation Robotics Lecture #2 Anindo Roy, PHDDocument101 pagesEnpm808J Rehabilitation Robotics Lecture #2 Anindo Roy, PHDRahul Subramonian BamaNo ratings yet
- Block Diagram of Control System: R e N y UDocument20 pagesBlock Diagram of Control System: R e N y Uমেশকাতুল ইসলাম100% (1)
- Chapter 8 ControlDocument96 pagesChapter 8 ControlDESHMUKH ANKIT PRAKASHRAONo ratings yet
- EE435 - Chapter1 - Lec1 - Introduction To Control Systems - A.HaddadDocument39 pagesEE435 - Chapter1 - Lec1 - Introduction To Control Systems - A.HaddadIbrahim abdoNo ratings yet
- Computer ClockDocument13 pagesComputer ClockGlan DevadhasNo ratings yet
- Lecture # 01 (EL-305) - DR - TariqDocument28 pagesLecture # 01 (EL-305) - DR - TariqFawad HassanNo ratings yet
- Lecture 8 Robot Control StudentDocument52 pagesLecture 8 Robot Control StudentMustafa BüyükNo ratings yet
- Direct Torque Control of Induction MotorDocument33 pagesDirect Torque Control of Induction MotorMaheshNo ratings yet
- Unit 1 - Control System - WWW - Rgpvnotes.inDocument12 pagesUnit 1 - Control System - WWW - Rgpvnotes.invikram singhNo ratings yet
- M475 - c2 - L3 - Digital Control Systems - NotesDocument3 pagesM475 - c2 - L3 - Digital Control Systems - NotesAli AlmakhmariNo ratings yet
- SPL 09 Introduction to Optimal ControlDocument42 pagesSPL 09 Introduction to Optimal Controlmiftah ahsanNo ratings yet
- Higher Order Sliding Mode Control of Uncertain Robot ManipulatorsDocument6 pagesHigher Order Sliding Mode Control of Uncertain Robot ManipulatorsOussama SadkiNo ratings yet
- Discrete-Time Controllers Structures and TuningDocument45 pagesDiscrete-Time Controllers Structures and Tuningskyrainbow123No ratings yet
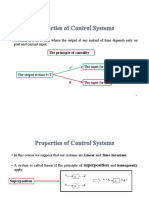
- A Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of CausalityDocument11 pagesA Causal System Is One, Where The Output at Any Instant of Time Depends Only On Past and Current Input. The Principle of Causalitygamer manNo ratings yet
- Disturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Document4 pagesDisturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Suresh SNo ratings yet
- Control SystemsDocument96 pagesControl SystemsDr. Gollapalli NareshNo ratings yet
- Rotor Angle Stability (1) Rotor Angle StabilityDocument17 pagesRotor Angle Stability (1) Rotor Angle Stabilityrasim_m1146No ratings yet
- One Step Ahead Nonlinear Predictive Control of Two Links Robot ManipulatorsDocument5 pagesOne Step Ahead Nonlinear Predictive Control of Two Links Robot ManipulatorsMartino Ojwok AjangnayNo ratings yet
- Control Systems IDocument340 pagesControl Systems ICarraan Dandeettirra Caala AltakkatakkaNo ratings yet
- Control SystemlDocument44 pagesControl SystemlSolid Work and Mechanical software TutorialNo ratings yet
- Lecture 1 IntroductionDocument29 pagesLecture 1 IntroductionMohanad Al-RekanyNo ratings yet
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDocument10 pagesRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNo ratings yet
- Linear Systems and Control - Week 10: Observer Based State Feedback Controller DesignDocument37 pagesLinear Systems and Control - Week 10: Observer Based State Feedback Controller DesignM Xubair Yousaf XaiNo ratings yet
- Lecture 02 AV-356 System ModelingDocument28 pagesLecture 02 AV-356 System ModelingUsama NazirNo ratings yet
- Modeling and SimulationDocument33 pagesModeling and Simulationabdul wakeelNo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Document36 pagesFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNo ratings yet
- DrSsim 2761 16069 2 Lecture1-IntroductionDocument38 pagesDrSsim 2761 16069 2 Lecture1-IntroductionZeeshan RafiqNo ratings yet
- Typical Real Time Applications: Ila Kaushik Dept. of IT KIET Group of InstitutionsDocument18 pagesTypical Real Time Applications: Ila Kaushik Dept. of IT KIET Group of InstitutionsSiddharth RajNo ratings yet
- DCsummary 1Document5 pagesDCsummary 1khin muyar ayeNo ratings yet
- EE-601: Linear System Theory: Prof. Bidyadhar Subudhi School of Electrical Sciences Indian Institute of Technology GoaDocument20 pagesEE-601: Linear System Theory: Prof. Bidyadhar Subudhi School of Electrical Sciences Indian Institute of Technology GoasunilsahadevanNo ratings yet
- Sensorless Sliding Mode Control of Induction Motor Drives: AbstractDocument6 pagesSensorless Sliding Mode Control of Induction Motor Drives: AbstractSumithra BalakrishnanNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Robot Mechanisms and Mechanical Devices IllustratedFrom EverandRobot Mechanisms and Mechanical Devices IllustratedRating: 4 out of 5 stars4/5 (1)
- Simulation of Temperature Controller For An Injection Mould Machine Using Fuzzy LogicDocument11 pagesSimulation of Temperature Controller For An Injection Mould Machine Using Fuzzy LogicRahmadBòzNo ratings yet
- R2017 - EEE Univ Dept Syllabu PDFDocument87 pagesR2017 - EEE Univ Dept Syllabu PDFsiva sakthiNo ratings yet
- Ee-474 Feedback Control System - 2012Document69 pagesEe-474 Feedback Control System - 2012Ali RazaNo ratings yet
- FCS Lab2Document36 pagesFCS Lab2muhammadNo ratings yet
- NI Tutorial 10685 enDocument5 pagesNI Tutorial 10685 enelzytacogelonaNo ratings yet
- Motivation For Analog IC DesignDocument32 pagesMotivation For Analog IC DesignSovan GhoshNo ratings yet
- LTIDocument16 pagesLTIAhmed AlhadarNo ratings yet
- Train EpicycloidalDocument29 pagesTrain EpicycloidalahmedguerinNo ratings yet
- Network AnalysisDocument18 pagesNetwork AnalysisAnupam GuptaNo ratings yet
- MCQS On CEDocument24 pagesMCQS On CEparth bhardwajNo ratings yet
- Project Control RubricDocument29 pagesProject Control RubricBrekhna JanNo ratings yet
- Louise Lope Adonis Pabillaran - Activity 3Document11 pagesLouise Lope Adonis Pabillaran - Activity 3Louise Lope PabillaranNo ratings yet
- JNTUA B. Tech Syllabus R15 Regulation II Year I Semester 2 1 Electrical Electronics Engineering EEEDocument16 pagesJNTUA B. Tech Syllabus R15 Regulation II Year I Semester 2 1 Electrical Electronics Engineering EEEThulasi PrasadNo ratings yet
- Signals and Systems With SolutionsDocument64 pagesSignals and Systems With SolutionsBikram PaulNo ratings yet
- Howtouse PCMDocument162 pagesHowtouse PCMGABRIEL OMAR PEREZ MEZANo ratings yet
- 2 DOF Ball Balancer - Workbook (Instructor) PDFDocument32 pages2 DOF Ball Balancer - Workbook (Instructor) PDFRaaj LavaNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- A Relation Between Filter Parameters of The Tow-Thomas-BiquadDocument6 pagesA Relation Between Filter Parameters of The Tow-Thomas-Biquadcarlocinfol_itNo ratings yet
- Klippel-Training 2 Vibration and Radiation Behavior of Loudspeakers MembranesDocument19 pagesKlippel-Training 2 Vibration and Radiation Behavior of Loudspeakers MembranesmerrickNo ratings yet
- Hydro Governor Control of Synchronous Machines: MATLAB/SIMULINK Based AnalysisDocument5 pagesHydro Governor Control of Synchronous Machines: MATLAB/SIMULINK Based AnalysisZohaibNo ratings yet
- Control System Notes by HPK Kumar PDFDocument56 pagesControl System Notes by HPK Kumar PDFlaiba100% (3)
- Control System Analysis and DesignDocument2 pagesControl System Analysis and DesignJunnel NegadNo ratings yet
- Start Download - View PDF: 110 Top Most Control SYSTEMS Objective Questions and Answers PDFDocument24 pagesStart Download - View PDF: 110 Top Most Control SYSTEMS Objective Questions and Answers PDFEj ParañalNo ratings yet
- Ellert, Merriam - 1963 - Synthesis of Feedback Controls Using Optimization Theory - An ExampleDocument15 pagesEllert, Merriam - 1963 - Synthesis of Feedback Controls Using Optimization Theory - An ExampleDiego FerruzzoNo ratings yet
- Discussion of Efficient Method To Compute Transfer Function of A Transformer From Eq. Circuit 210885Document2 pagesDiscussion of Efficient Method To Compute Transfer Function of A Transformer From Eq. Circuit 210885cristian1961No ratings yet
- Coupled TanksDocument32 pagesCoupled TanksAnkur MondalNo ratings yet
- CAN BUS Steering Gear ControlDocument7 pagesCAN BUS Steering Gear ControlsithulibraNo ratings yet
- Modified Nodal Analysis-Based Determination of Transfer Functions For Multi-Inputs Multi-Outputs Linear CircuitsDocument8 pagesModified Nodal Analysis-Based Determination of Transfer Functions For Multi-Inputs Multi-Outputs Linear CircuitsaraaraNo ratings yet
- Hall BookDocument126 pagesHall BookbanguyenbkNo ratings yet