Download as ppt, pdf, or txt
You might also like
- Effects ManualDocument213 pagesEffects Manualliamsutd99No ratings yet
- FYPMS SRS Final) .docFYPMS SRS FinDocument21 pagesFYPMS SRS Final) .docFYPMS SRS FinZaviarNo ratings yet
- Finite Element Modeling and Analysis: CE 595: Course Part 2 Amit H. VarmaDocument101 pagesFinite Element Modeling and Analysis: CE 595: Course Part 2 Amit H. VarmaEdilson Sarmiento AlonsoNo ratings yet
- FEA Knowledge 1.4Document20 pagesFEA Knowledge 1.4APURV THE Black Horse DRVNo ratings yet
- Chapter10 180706202937Document33 pagesChapter10 180706202937SALEEM MALIKNo ratings yet
- Chapter3 180616192627Document55 pagesChapter3 180616192627SALEEM MALIKNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 10 - StrainDocument24 pagesME 234 Mechanics of Materials - I: Lecture 10 - Strainabdullah bin masoodNo ratings yet
- ME 234 Mechanics of Materials - I: Lecture 10 - StrainDocument24 pagesME 234 Mechanics of Materials - I: Lecture 10 - Strainabdullah bin masoodNo ratings yet
- Torsionless Grillage AnalysisDocument28 pagesTorsionless Grillage AnalysisAnonymous 1HFV185Sl4No ratings yet
- Capítulo IX-Elemento ShellDocument21 pagesCapítulo IX-Elemento ShellVladimir Sánchez CalderónNo ratings yet
- Chap 2 MechDocument59 pagesChap 2 MechJune del MundoNo ratings yet
- 1Document15 pages1manognya salendraNo ratings yet
- Lecture 2Document48 pagesLecture 2EllieNo ratings yet
- Plane Frame and Grid EquationsDocument48 pagesPlane Frame and Grid EquationsHaque BossAnwarNo ratings yet
- Moment Area Method ProjectDocument36 pagesMoment Area Method Projectfarisdanialfadli100% (1)
- FEA Basic Theory IntroductionDocument33 pagesFEA Basic Theory IntroductionAshokNo ratings yet
- Lecture 2 (11th Jan, 2024)Document36 pagesLecture 2 (11th Jan, 2024)Harsh JainNo ratings yet
- Structural Analysis NotesDocument166 pagesStructural Analysis NotesdunyNo ratings yet
- Chapter 3 - 2Document65 pagesChapter 3 - 2Ardeshir BahreininejadNo ratings yet
- Computer Implementation of The Finite Element MethodDocument32 pagesComputer Implementation of The Finite Element Methodmkadam02No ratings yet
- GEG 113 - RevisionDocument51 pagesGEG 113 - RevisionMubarakNo ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- Lec 03, Rectangular Components of ForceDocument21 pagesLec 03, Rectangular Components of ForceAli Raza100% (1)
- Chapter # 7 - (Part-A)Document29 pagesChapter # 7 - (Part-A)farah.No ratings yet
- Solid State Physics: Course No:508: Bsc. (Hons)Document45 pagesSolid State Physics: Course No:508: Bsc. (Hons)DaniyalNo ratings yet
- L29 - Beam DeflectionsDocument13 pagesL29 - Beam DeflectionsVince CabugNo ratings yet
- MOM Chapter 12 New-EditedDocument36 pagesMOM Chapter 12 New-EditedIvan NgNo ratings yet
- L6 Deflection and StiffnessDocument21 pagesL6 Deflection and StiffnessBabila JosephNo ratings yet
- 7, Epfm2Document32 pages7, Epfm2dhairyaapandyaNo ratings yet
- Chapter 4Document50 pagesChapter 4diwash ghimireNo ratings yet
- MECH3300 - Lecture 4: Introduction To 2D Finite ElementsDocument15 pagesMECH3300 - Lecture 4: Introduction To 2D Finite Elementssqaiba_gNo ratings yet
- Exam1 SolsDocument9 pagesExam1 SolsLita AksariNo ratings yet
- Module08 PolynomialRegressionSplineGAMsDocument56 pagesModule08 PolynomialRegressionSplineGAMsriya pandeyNo ratings yet
- Review Module-Reinforced Concrete Design (RCD Columns-USD Part 2)Document3 pagesReview Module-Reinforced Concrete Design (RCD Columns-USD Part 2)Dream CatcherNo ratings yet
- An Eigenvalue Problem: Modal Analysis - Lesson 3Document9 pagesAn Eigenvalue Problem: Modal Analysis - Lesson 3Horia PetrescuNo ratings yet
- CIVL6003 2021 Lec4 NotesDocument71 pagesCIVL6003 2021 Lec4 NotesYUK LAM WONGNo ratings yet
- 1.hafta-Fundamental Concepts and PrinciplesDocument37 pages1.hafta-Fundamental Concepts and PrinciplesplnozkbnNo ratings yet
- 3.4 Force - Scalars & VectorsDocument10 pages3.4 Force - Scalars & VectorsHakim AbbasNo ratings yet
- Lecture 3 Stiffness Method TrussesDocument80 pagesLecture 3 Stiffness Method TrussesMuhammad Hassan IlyasNo ratings yet
- Week 8 Deflection Moment Area MethodDocument20 pagesWeek 8 Deflection Moment Area MethodHAROLD CHRIST FALCULANNo ratings yet
- 3 - Bar ElementDocument53 pages3 - Bar ElementLoo Kai XenNo ratings yet
- Kesetimbangan Partikel Dan Keseimbangan Benda TegarDocument25 pagesKesetimbangan Partikel Dan Keseimbangan Benda TegarEka NugrahaNo ratings yet
- Shear and Moment Equations and DiagramsDocument69 pagesShear and Moment Equations and DiagramsRuskin TanoyNo ratings yet
- 0408-410 Into To Finite Element CH 3 NDocument77 pages0408-410 Into To Finite Element CH 3 NAmir HNo ratings yet
- 0408-410 Into To Finite Element CH 4 NDocument32 pages0408-410 Into To Finite Element CH 4 NAmir HNo ratings yet
- Ch06-Deflection of Beams - LectureDocument24 pagesCh06-Deflection of Beams - LectureLeo Wong100% (1)
- CEng-6501 ToE (Chapter-6)Document8 pagesCEng-6501 ToE (Chapter-6)Fowzi MohammedNo ratings yet
- Section 3.2Document16 pagesSection 3.2bmbaalani4No ratings yet
- 6522ENG Lecture6Document32 pages6522ENG Lecture6Junaid AshrafNo ratings yet
- Corepure1 Chapter 5::: Volumes of RevolutionDocument19 pagesCorepure1 Chapter 5::: Volumes of RevolutionJon HadleyNo ratings yet
- Plates and Shells: Plate FormulationDocument12 pagesPlates and Shells: Plate FormulationkkNo ratings yet
- Chap-1 Structural Design 2012 Yield LineDocument52 pagesChap-1 Structural Design 2012 Yield LineABAMELANo ratings yet
- Piltner Taylor Triangular FE Rotational DOF Enhanced Strain 2000Document8 pagesPiltner Taylor Triangular FE Rotational DOF Enhanced Strain 2000Government MULENo ratings yet
- AVL TreesDocument31 pagesAVL Treespooja0letscrackitNo ratings yet
- Theory of Elasticity: Ceng 6501Document53 pagesTheory of Elasticity: Ceng 6501Tekle Germariam100% (1)
- CE474 Ch5 StiffnessMethodDocument35 pagesCE474 Ch5 StiffnessMethodRaulNo ratings yet
- Grain BoundariesDocument5 pagesGrain Boundariesdon donNo ratings yet
- MathsTraks: Geometry: A Collection of Blackline Masters for ages 11-14From EverandMathsTraks: Geometry: A Collection of Blackline Masters for ages 11-14No ratings yet
- Day / Night Sensor: DNS25 InstructionDocument1 pageDay / Night Sensor: DNS25 InstructionClea Marie Capacillo BatoonNo ratings yet
- Meeting Room ChecklistDocument2 pagesMeeting Room ChecklistLartoonNo ratings yet
- Partial Discharge Theory and Applications To Electrical SystemsDocument15 pagesPartial Discharge Theory and Applications To Electrical Systemsreza515heiNo ratings yet
- Geronimo Z. Velasco - IOMDocument4 pagesGeronimo Z. Velasco - IOMGazelle Joy UlalanNo ratings yet
- Luminous 3 en LRDocument52 pagesLuminous 3 en LRraphyjoseph100% (1)
- TurbiinikalvotDocument32 pagesTurbiinikalvotAbdalmalek shamsanNo ratings yet
- SL No:30 Date: 07.10.2020: Process - Planning To Design Version - 1.0Document4 pagesSL No:30 Date: 07.10.2020: Process - Planning To Design Version - 1.0Varunn VelNo ratings yet
- Install GuideDocument2 pagesInstall GuideffdfNo ratings yet
- Kaeser Report ED Tcm219 7486Document13 pagesKaeser Report ED Tcm219 7486Ramani KrishnamoorthyNo ratings yet
- Cam Switch Obzor Catalogue PDFDocument63 pagesCam Switch Obzor Catalogue PDFneo43No ratings yet
- 0530-DWG-BSC-37-005 CRT Cube Overview Rev02Document1 page0530-DWG-BSC-37-005 CRT Cube Overview Rev02Luis Marín DíazNo ratings yet
- Electro Beam Lithography and X Ray LithographyDocument4 pagesElectro Beam Lithography and X Ray LithographyRia Rushin JosephNo ratings yet
- PHEONWJ-M-SPE-0021 1 Piping Fabrication & InstallationDocument22 pagesPHEONWJ-M-SPE-0021 1 Piping Fabrication & InstallationIksan Adityo Mulyo100% (1)
- Device DriverDocument2 pagesDevice DriverglobalpiyushNo ratings yet
- Java Advanced Imaging API Home PageDocument3 pagesJava Advanced Imaging API Home PageJihad NehmeNo ratings yet
- Equivalents of Carbon Steel QualitiesDocument10 pagesEquivalents of Carbon Steel QualitiesRamani Elampooranan K ENo ratings yet
- CREW: U.S. Department of Homeland Security: U.S. Customs and Border Protection: Regarding Border Fence: O17 Analysis Final (Redacted)Document8 pagesCREW: U.S. Department of Homeland Security: U.S. Customs and Border Protection: Regarding Border Fence: O17 Analysis Final (Redacted)CREWNo ratings yet
- Lesson 11 Scan Line PolygonDocument16 pagesLesson 11 Scan Line Polygondattatrayin2002No ratings yet
- Fiitjee Xi Practice PaperDocument19 pagesFiitjee Xi Practice Paperrupal_jain108100% (2)
- Lab ManualDocument34 pagesLab ManualSamuelPannierselvamShirleyNo ratings yet
- Bsi BS en 60974-2 - 2013Document22 pagesBsi BS en 60974-2 - 2013alferedNo ratings yet
- Azanechiller Series 2010 (3) Final VersionDocument12 pagesAzanechiller Series 2010 (3) Final VersionRajkumar GulatiNo ratings yet
- FSS TCCDocument2 pagesFSS TCCEko ParjonoNo ratings yet
- Victor A. Skormin (Auth.) - Introduction To Process Control - Analysis, Mathematical Modeling, Control and Optimization (2016, Springer International Publishing)Document265 pagesVictor A. Skormin (Auth.) - Introduction To Process Control - Analysis, Mathematical Modeling, Control and Optimization (2016, Springer International Publishing)Wouter Plessers100% (1)
- Rule FunctionsDocument15 pagesRule FunctionssomojyotiNo ratings yet
- AnimationDocument5 pagesAnimationgdayanandamNo ratings yet
- Transformer DetailsDocument3 pagesTransformer DetailsbinodeNo ratings yet
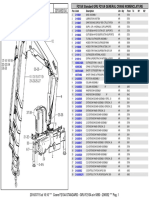
- Fassi F210a.25Document78 pagesFassi F210a.25Aleixandre GomezNo ratings yet