Download as ppt, pdf, or txt
You might also like
- AGS-688 ManualDocument60 pagesAGS-688 Manualvatcslav0% (1)
- HVAC Duct TakeoffDocument1 pageHVAC Duct TakeoffrrductinstallersNo ratings yet
- Companion Program To: Geotechnical Engineering: Principles and Practiced, Second Edition Coduto, Yeung, & Kitch (2011)Document18 pagesCompanion Program To: Geotechnical Engineering: Principles and Practiced, Second Edition Coduto, Yeung, & Kitch (2011)Online Review SpecialistsNo ratings yet
- 2 The Crystal Chemistry of ZeolitesDocument48 pages2 The Crystal Chemistry of ZeolitesJohn YuNo ratings yet
- Acdc1000 11124 & 11226Document34 pagesAcdc1000 11124 & 11226Jaime ArreolaNo ratings yet
- Image Filtering: Formal Terminology - Filtering With MasksDocument30 pagesImage Filtering: Formal Terminology - Filtering With MasksFarhana NoureenNo ratings yet
- Image Filtering: Formal Terminology - Filtering With MasksDocument30 pagesImage Filtering: Formal Terminology - Filtering With MasksTu My LamNo ratings yet
- Correlation and ConvolutionDocument59 pagesCorrelation and ConvolutionDavid LichaaNo ratings yet
- Lect2 PDFDocument43 pagesLect2 PDFphysicsnewblolNo ratings yet
- T2310 - TDS3651 - L03 - FilteringDocument68 pagesT2310 - TDS3651 - L03 - FilteringASTROHALT C4No ratings yet
- 02 Image Processing F15Document41 pages02 Image Processing F15Tommy KongNo ratings yet
- Image EnhancementDocument39 pagesImage EnhancementhakanNo ratings yet
- Lecture 2.1 - Image Processing Image Filtering: Idar DyrdalDocument38 pagesLecture 2.1 - Image Processing Image Filtering: Idar DyrdalDaniel MoraNo ratings yet
- 03 Filters Contours Segmentation - SPDocument96 pages03 Filters Contours Segmentation - SPMoeen TorabiNo ratings yet
- Building Convolutional Neural Networks For Image Classification SlidesDocument57 pagesBuilding Convolutional Neural Networks For Image Classification SlidesRahul ShettyNo ratings yet
- Computer Vision Lec-1Document110 pagesComputer Vision Lec-1Saba TariqNo ratings yet
- 03 3.3 Truth Tables Logic Formulas Logic Circuits 28-54Document43 pages03 3.3 Truth Tables Logic Formulas Logic Circuits 28-54oliNo ratings yet
- 04 Frequency Part1Document83 pages04 Frequency Part1emrecan cincanNo ratings yet
- Praktikum RNNDocument11 pagesPraktikum RNNAlex Sudrajat100% (1)
- Lec02 FilterDocument64 pagesLec02 FiltermuucoolNo ratings yet
- Project 06Document14 pagesProject 06parix39346No ratings yet
- It2623-Module3 Combinational CktsDocument42 pagesIt2623-Module3 Combinational CktsDERICK TIMOTHY CASTRONo ratings yet
- Exercise 4Document13 pagesExercise 4Harinda SamarasekaraNo ratings yet
- 04 90 HW - w4 - Jaime - Leon 90 PDFDocument22 pages04 90 HW - w4 - Jaime - Leon 90 PDFtripijbNo ratings yet
- Image Filtering: Associate Professor Faculty of Computer Science Institute of Business Administration - KarachiDocument59 pagesImage Filtering: Associate Professor Faculty of Computer Science Institute of Business Administration - Karachioop projectNo ratings yet
- Spatial Filtering: by Dr. K. M. BhurchandiDocument82 pagesSpatial Filtering: by Dr. K. M. BhurchandiGejo GeorgesanNo ratings yet
- Chapter05 SMDocument46 pagesChapter05 SMleeNo ratings yet
- Image Formation: F (X, Y) Reflectance (X, Y) Illumination (X, Y)Document76 pagesImage Formation: F (X, Y) Reflectance (X, Y) Illumination (X, Y)hyfkyhj ;mnk,.No ratings yet
- NAC Extender 2 Calculation - SummaryDocument1 pageNAC Extender 2 Calculation - Summaryghazi4uNo ratings yet
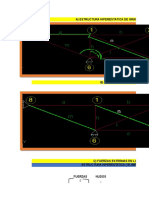
- Practica Analisis Estructural II-lara Chinchay Roberto CarlosDocument36 pagesPractica Analisis Estructural II-lara Chinchay Roberto CarlosRoberto Carlos Lara ChinchayNo ratings yet
- 2 ImageFilteringDocument56 pages2 ImageFilteringjiarui qiuNo ratings yet
- Ejerciccio de MicrocontroladorDocument28 pagesEjerciccio de MicrocontroladorLuis Adrian ChipanaNo ratings yet
- 2 Filters17Document58 pages2 Filters17hakanNo ratings yet
- CS376 Lecture 2Document71 pagesCS376 Lecture 2beefypixel761No ratings yet
- PESO ESPECIFICO Agregado GruesoDocument43 pagesPESO ESPECIFICO Agregado Gruesodavid cristopher villazon RuizNo ratings yet
- 1.UJI TOKSISITAS PADA MARMUT AKUT - TYPHOID TableDocument16 pages1.UJI TOKSISITAS PADA MARMUT AKUT - TYPHOID TableDika Agus KestiawanNo ratings yet
- Digital ImageDocument15 pagesDigital ImageestifanosNo ratings yet
- 0001 Introduction SpiceDocument9 pages0001 Introduction SpiceRimsha pervaizNo ratings yet
- PCB Reprt (1) FinalDocument8 pagesPCB Reprt (1) FinalShamma SNo ratings yet
- 8.4 Convolutional Neural NetworksDocument12 pages8.4 Convolutional Neural NetworksRajaNo ratings yet
- Veeam Replication Diary 2022Document3 pagesVeeam Replication Diary 2022MarioussNo ratings yet
- Cuadro de Carga Local ComercialDocument14 pagesCuadro de Carga Local ComercialDiegoNo ratings yet
- Chapter 8Document71 pagesChapter 8SunnyNo ratings yet
- Lec 12 Jacobi MethodDocument30 pagesLec 12 Jacobi MethodajpsalisonNo ratings yet
- DLD Final Lab ReportDocument10 pagesDLD Final Lab Reporthaiqa suhail100% (1)
- Portico Paso PasoDocument7 pagesPortico Paso PasoWilockNo ratings yet
- Customer+Emission+Calculator+ (v1 5)Document4 pagesCustomer+Emission+Calculator+ (v1 5)Chika OlakitanNo ratings yet
- Computer Vision ch2Document75 pagesComputer Vision ch2ssNo ratings yet
- Tabla de Transicion de Estados - Maquina ExpendedoraDocument1 pageTabla de Transicion de Estados - Maquina ExpendedoraDavid Sandoval FriasNo ratings yet
- Melay and Moore and BCD and Excess 3Document11 pagesMelay and Moore and BCD and Excess 3win papasanNo ratings yet
- Trabajo SeudoDocument89 pagesTrabajo SeudoJEHAN FRANCO SANTAMARIA PEREZNo ratings yet
- Amortized Analysis: CLRS Chapter 17: Last Revised: August 30, 2006Document18 pagesAmortized Analysis: CLRS Chapter 17: Last Revised: August 30, 2006Reshov RoyNo ratings yet
- Lab 2 - 2 Bit Logical Shifter W/ CadenceDocument9 pagesLab 2 - 2 Bit Logical Shifter W/ CadenceacormierNo ratings yet
- Multiplier and Comparator - 1049206536Document11 pagesMultiplier and Comparator - 1049206536RUSSELLJEROME PUNZALANNo ratings yet
- Lighting Lumen CalculationDocument9 pagesLighting Lumen Calculationredulajaypee15No ratings yet
- Copy of Ist U4 l1 Activity 2 Creating Images Using Binary CodeDocument1 pageCopy of Ist U4 l1 Activity 2 Creating Images Using Binary Codeapi-749498643No ratings yet
- Room-1 22 2.2 2.8 2.8 200 2 18: Lighting Lumen Calculation Sheet Lighting Lumen Calculation SheetDocument18 pagesRoom-1 22 2.2 2.8 2.8 200 2 18: Lighting Lumen Calculation Sheet Lighting Lumen Calculation SheetkumarNo ratings yet
- Vacuum Bazookas, Electric Rainbow Jelly, and 27 Other Saturday Science ProjectsFrom EverandVacuum Bazookas, Electric Rainbow Jelly, and 27 Other Saturday Science ProjectsRating: 5 out of 5 stars5/5 (2)
- Standard-Slope Integration: A New Approach to Numerical IntegrationFrom EverandStandard-Slope Integration: A New Approach to Numerical IntegrationNo ratings yet
- Q2 SS 3622 1444 IDocument2 pagesQ2 SS 3622 1444 IAhmed SaidNo ratings yet
- QP Cpe133 IiiDocument4 pagesQP Cpe133 IiiAhmed SaidNo ratings yet
- Form 02 Room Summary ReportDocument1 pageForm 02 Room Summary ReportAhmed SaidNo ratings yet
- Quiz 1 1444 Sem 1 Ss AkeyDocument2 pagesQuiz 1 1444 Sem 1 Ss AkeyAhmed SaidNo ratings yet
- CPE133 - Lecture Notes 4 - 451 UpdateDocument13 pagesCPE133 - Lecture Notes 4 - 451 UpdateAhmed SaidNo ratings yet
- CPE 261-Chapter 2.2 - 451-FSDocument37 pagesCPE 261-Chapter 2.2 - 451-FSAhmed SaidNo ratings yet
- Cpe261-Quiz 2 - Fs-451-IDocument1 pageCpe261-Quiz 2 - Fs-451-IAhmed SaidNo ratings yet
- CH 4-1 Signals and Systems - L.TR - ILTr - 441Document11 pagesCH 4-1 Signals and Systems - L.TR - ILTr - 441Ahmed SaidNo ratings yet
- CPE 261-Chapter 4-Laplace Tr-451Document39 pagesCPE 261-Chapter 4-Laplace Tr-451Ahmed SaidNo ratings yet
- Form 01 Cheating ReportDocument1 pageForm 01 Cheating ReportAhmed SaidNo ratings yet
- Last Name: First Name: ID Number: Lab Day/time: Lecture TimeDocument4 pagesLast Name: First Name: ID Number: Lab Day/time: Lecture TimeAhmed SaidNo ratings yet
- FINNAL MID II - FQP - DSP-31-10-2023-Final-signDocument4 pagesFINNAL MID II - FQP - DSP-31-10-2023-Final-signAhmed SaidNo ratings yet
- Cne PlanDocument105 pagesCne PlanAhmed SaidNo ratings yet
- 13 - CPE220 - 1019 - Theory Final Exam Answer KeyDocument7 pages13 - CPE220 - 1019 - Theory Final Exam Answer KeyAhmed SaidNo ratings yet
- CS523S: Operating Systems: Fred KuhnsDocument40 pagesCS523S: Operating Systems: Fred KuhnsAhmed SaidNo ratings yet
- Academic Calendar (1437-1438 AH) : King Khalid University College of Computer ScienceDocument1 pageAcademic Calendar (1437-1438 AH) : King Khalid University College of Computer ScienceAhmed SaidNo ratings yet
- King Khalid University: - Final Exam / 2°d Semester, 1435/1436Document4 pagesKing Khalid University: - Final Exam / 2°d Semester, 1435/1436Ahmed SaidNo ratings yet
- CS523S: Operating Systems: Fred KuhnsDocument40 pagesCS523S: Operating Systems: Fred KuhnsAhmed SaidNo ratings yet
- CE Course Syllabus - 222CPE-2018Document1 pageCE Course Syllabus - 222CPE-2018Ahmed SaidNo ratings yet
- 210 CNE Course Syllabus-392Document5 pages210 CNE Course Syllabus-392Ahmed SaidNo ratings yet
- ContentDocument16 pagesContenttootlajosNo ratings yet
- LEEDpresentationDocument16 pagesLEEDpresentationAnirudh JaswalNo ratings yet
- Moxa Embedded Solution On IEC 61850Document25 pagesMoxa Embedded Solution On IEC 61850vovick_vovickNo ratings yet
- Beating The Bonk QuestionsDocument1 pageBeating The Bonk Questionst3xxaNo ratings yet
- Indofood Case Study WEBDocument2 pagesIndofood Case Study WEBRiduan LieNo ratings yet
- Wan Bao Construction Company: Register of Environmental AspectsDocument43 pagesWan Bao Construction Company: Register of Environmental AspectsJusnie Erwine EdwardNo ratings yet
- DST SERB Karyashala Workshop May24 BrochureDocument2 pagesDST SERB Karyashala Workshop May24 BrochurebensonNo ratings yet
- Fitgurlmel's 365 Food Guide by Melissa AlcantaraDocument27 pagesFitgurlmel's 365 Food Guide by Melissa AlcantaraSinem YukselNo ratings yet
- EW-3500-C and D EW-4200-C and D Marine Diesel Generators: Ntec EST NCDocument27 pagesEW-3500-C and D EW-4200-C and D Marine Diesel Generators: Ntec EST NCGeorgiNo ratings yet
- Acg01 IntroDocument34 pagesAcg01 IntroGiang T.C. TranNo ratings yet
- Best Control For FliesDocument30 pagesBest Control For FliesDavidNo ratings yet
- Apply Good Dispensing Principles - NEW-1Document49 pagesApply Good Dispensing Principles - NEW-1abelashe2No ratings yet
- SP Bti CP658 V2.2Document4 pagesSP Bti CP658 V2.2Ry GiNo ratings yet
- Fuzzy SystemsDocument226 pagesFuzzy SystemsZelalem GirmaNo ratings yet
- 904 TheBockSagaDocument6 pages904 TheBockSagaDick SmithNo ratings yet
- Method 1: IB Questionbank Mathematics Higher Level 3rd Edition 1Document8 pagesMethod 1: IB Questionbank Mathematics Higher Level 3rd Edition 1Muhamad Zahwan AnwarNo ratings yet
- Comment Sheet No SPO 16 01289Document5 pagesComment Sheet No SPO 16 01289juel19No ratings yet
- Lecture-5 - Classification of Process Variables - Control StrategiesDocument18 pagesLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniNo ratings yet
- Cifra Club - Debbie Gibson - Lost in Your EyesDocument3 pagesCifra Club - Debbie Gibson - Lost in Your Eyesnivaldo de oliveira OliveiraNo ratings yet
- Package FaultsDocument6 pagesPackage FaultsArunraj Arumugam100% (1)
- Summary Literature Review of Hydration of Cement"Document2 pagesSummary Literature Review of Hydration of Cement"MuhammadZAmjadNo ratings yet
- Module 1: Introduction To Network Basics and AdministrationDocument40 pagesModule 1: Introduction To Network Basics and AdministrationDJEFOUO FOUODJI ANGE MAGLOIRENo ratings yet
- Van Soest 1991Document15 pagesVan Soest 1991Thiago RochaNo ratings yet
- Alg 1 HWPDocument184 pagesAlg 1 HWPHaad MahmoodNo ratings yet
- Aspen Mho Mho4Document12 pagesAspen Mho Mho4Giovani ScarpatiNo ratings yet
- Difference Between Slip Ring Motor With Conventional Drive and Squirrel Cage Motor With Variable Speed DriveDocument4 pagesDifference Between Slip Ring Motor With Conventional Drive and Squirrel Cage Motor With Variable Speed DriveMohamed Ayman Hefny MohamedNo ratings yet
- Magnet Motor Unit Exam Review KeyDocument4 pagesMagnet Motor Unit Exam Review Keyapi-110202130No ratings yet