Download as ppt, pdf, or txt
You might also like
- Traffic Engineering Topic: Shockwave AnalysisDocument48 pagesTraffic Engineering Topic: Shockwave Analysistamsacheson_r143150% (2)
- Ansoft Simplorer: Model Derivation and Control Design of A Buck Converter UsingDocument25 pagesAnsoft Simplorer: Model Derivation and Control Design of A Buck Converter Usingc_u_r_s_e_dNo ratings yet
- Cruise ControlDocument22 pagesCruise ControlMiles PierceNo ratings yet
- Csu Dan SimonDocument36 pagesCsu Dan SimonUttam MNNo ratings yet
- Linear Control Chapter 1Document15 pagesLinear Control Chapter 1Himanshu SinghNo ratings yet
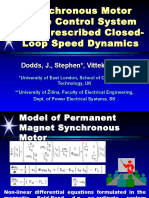
- Synchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsDocument20 pagesSynchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsVijay RajuNo ratings yet
- Motor 2Document49 pagesMotor 2api-247714257No ratings yet
- Fault Level Calculation - MethodsDocument46 pagesFault Level Calculation - MethodsPichumani100% (5)
- Antenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringDocument25 pagesAntenna Azimuth and Its Simulation by Lab View Program: School of Electrical and Electronoic EngineeringKenneth CastroNo ratings yet
- Jian Liao, Lin He Rongwu Xu, Zongbin ChenDocument11 pagesJian Liao, Lin He Rongwu Xu, Zongbin ChenhathamphanNo ratings yet
- Electrical DesignDocument47 pagesElectrical Designชัยณรงค์ เทียนบุตรNo ratings yet
- Paper Title: Ajay Kumar Gudla and Saikat ChakrabartiDocument5 pagesPaper Title: Ajay Kumar Gudla and Saikat ChakrabartiAshutosh KumarNo ratings yet
- Dynamic Analysis - 01-11-2022Document26 pagesDynamic Analysis - 01-11-2022suresh babuNo ratings yet
- Unit E - Traffic Analysis at Signalized Intersections - Part IIIDocument29 pagesUnit E - Traffic Analysis at Signalized Intersections - Part IIIanthony mikhaelNo ratings yet
- Model Adaptive Control Tire Test MachineDocument14 pagesModel Adaptive Control Tire Test MachinesiritapeNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- DC DrivesDocument50 pagesDC DrivesjvilasisNo ratings yet
- Lab ManualDocument9 pagesLab ManualnatashaNo ratings yet
- Quadrature Amplitude Modulation (QAM)Document17 pagesQuadrature Amplitude Modulation (QAM)Fahad RizwanNo ratings yet
- 8.line Distance ProtectionDocument76 pages8.line Distance ProtectionMuruganantham Chandrappan100% (2)
- Multi-Vehicle Adaptive Cruise Control With Collision Avoidance in Various TransitionsDocument18 pagesMulti-Vehicle Adaptive Cruise Control With Collision Avoidance in Various TransitionsmecharoNo ratings yet
- Compensation Homework With A QuizDocument14 pagesCompensation Homework With A QuizFahad KhosaNo ratings yet
- DDM - Mechatronics - Project 1Document3 pagesDDM - Mechatronics - Project 1MuntoiaNo ratings yet
- Impact Load CalculationDocument2 pagesImpact Load CalculationAkshay AgatkarNo ratings yet
- Bt21ece078 Dmlab Assignment 00Document6 pagesBt21ece078 Dmlab Assignment 00gannamaneniguruswami2002No ratings yet
- Teoria Controlador PIDDocument5 pagesTeoria Controlador PIDEmanuel MorochoNo ratings yet
- Ground Penetrating RadarDocument27 pagesGround Penetrating RadarNag BhushanNo ratings yet
- Control of BLDC Machines With Improved Performance: OrganizationDocument54 pagesControl of BLDC Machines With Improved Performance: OrganizationM A InayathullaahNo ratings yet
- Dist Relay With CVTDocument26 pagesDist Relay With CVTjaved shaikh chaandNo ratings yet
- Practical CaseDocument13 pagesPractical Casesreeragks1989No ratings yet
- Day 2 Part 1 Dist PrincipleDocument24 pagesDay 2 Part 1 Dist Principlestopnaggingme1100% (1)
- FVSysID ShortCourse 7 ExamplesDocument76 pagesFVSysID ShortCourse 7 ExamplesNuta ConstantinNo ratings yet
- Class07 Using Transmission LinesDocument24 pagesClass07 Using Transmission LinesVikram Raj SinghNo ratings yet
- Constrained Predictive Control of A Servo-Driven Tracking TurretDocument6 pagesConstrained Predictive Control of A Servo-Driven Tracking TurretVu Duc TruongNo ratings yet
- Dynamometer SpecificationDocument4 pagesDynamometer SpecificationupenderNo ratings yet
- Logic Gates: Power and Other Logic FamilyDocument36 pagesLogic Gates: Power and Other Logic FamilybhawnaNo ratings yet
- Comp AeroelasticityDocument28 pagesComp Aeroelasticityபிரபாகரன் ஆறுமுகம்No ratings yet
- Mart Data2001bDocument30 pagesMart Data2001bdffdfNo ratings yet
- 02 Position C 0Document19 pages02 Position C 0Pham LongNo ratings yet
- Ec 2010Document18 pagesEc 2010Tiken TakhellambamNo ratings yet
- Adani Pattern and QuestionDocument1 pageAdani Pattern and QuestionAbhishek SinhaNo ratings yet
- Refreshing GSM FundamentalsDocument17 pagesRefreshing GSM FundamentalsirahNo ratings yet
- CMOS Design With Delay ConstraintsDocument22 pagesCMOS Design With Delay ConstraintsKumar Amit VermaNo ratings yet
- Novel Modeling and Damping Technique For Hybrid Stepper MotorDocument6 pagesNovel Modeling and Damping Technique For Hybrid Stepper MotorVashik BedasieNo ratings yet
- Refresher (Surveying and Transportation Engineering Discussion)Document92 pagesRefresher (Surveying and Transportation Engineering Discussion)Ejay EmpleoNo ratings yet
- Power Systems K-NotesDocument36 pagesPower Systems K-NotesAkashGaurav100% (1)
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- Ec 201 Lecture 20Document6 pagesEc 201 Lecture 20Abdul Karim KhanNo ratings yet
- The Cmos Inverter: OutlineDocument20 pagesThe Cmos Inverter: OutlinehappyharrNo ratings yet
- MECH243 - Final - Fall 2017-2018Document6 pagesMECH243 - Final - Fall 2017-2018Majid YassineNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Electronic Automotive Transmission Troubleshooter Nissan-Infinity VehiclesFrom EverandElectronic Automotive Transmission Troubleshooter Nissan-Infinity VehiclesNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Measurement While Drilling: Signal Analysis, Optimization and DesignFrom EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Grade 8 Cur MapDocument5 pagesGrade 8 Cur MapNinNo ratings yet
- 1 s2.0 S221201731300649X Main PDFDocument6 pages1 s2.0 S221201731300649X Main PDFNinNo ratings yet
- Digital CommunicationsDocument129 pagesDigital CommunicationsNinNo ratings yet
- Satellite CommunicationsDocument82 pagesSatellite CommunicationsNinNo ratings yet
- Robert 5Document440 pagesRobert 5로헬No ratings yet
- My Putnam by R. StanleyDocument8 pagesMy Putnam by R. StanleyKhoon Yu TanNo ratings yet
- Learning Outcomes:: Lesson I Basic Concepts of The SelfDocument8 pagesLearning Outcomes:: Lesson I Basic Concepts of The SelfCarl Alexis SaulanNo ratings yet
- Installation and O&M of Offshore Renewable Energy Systems: Location: ONLINE Webinar Course ScheduleDocument1 pageInstallation and O&M of Offshore Renewable Energy Systems: Location: ONLINE Webinar Course ScheduleazbNo ratings yet
- Homework: Name DateDocument24 pagesHomework: Name DateboysNo ratings yet
- Energy Led: TV3170 / 3190 HDTVDocument25 pagesEnergy Led: TV3170 / 3190 HDTVVladimir PašićNo ratings yet
- Ganpat University U.V. Patel College of Engineering Mechatronics Engineering Department Experiment: - 4Document5 pagesGanpat University U.V. Patel College of Engineering Mechatronics Engineering Department Experiment: - 4Jaygopal SharmaNo ratings yet
- Culkin Darnell Miller T Echos Programmer ManualDocument7 pagesCulkin Darnell Miller T Echos Programmer ManualBenjamin CulkinNo ratings yet
- Control-Valve-Handbook-En-3661206 Pages 21-30Document10 pagesControl-Valve-Handbook-En-3661206 Pages 21-30trevNo ratings yet
- Group 2 Specification: 1. Major ComponentDocument12 pagesGroup 2 Specification: 1. Major ComponentREMZONANo ratings yet
- Trial SPM MT 2014 Jawapan K2Document12 pagesTrial SPM MT 2014 Jawapan K2Mohd Ellif SarianNo ratings yet
- CN - PP - AttendanceDocument10 pagesCN - PP - Attendanceagoyal5145No ratings yet
- AI LandscapeDocument111 pagesAI LandscapeSuraj PatilNo ratings yet
- Lhotka UEB To EBAE Comparison Manual 2015Document69 pagesLhotka UEB To EBAE Comparison Manual 2015Karel BrgNo ratings yet
- Department of Education: Professional Development PlanDocument2 pagesDepartment of Education: Professional Development PlanJen Apinado80% (5)
- Al-Hikma 1961 PDFDocument97 pagesAl-Hikma 1961 PDFmahmood2354767No ratings yet
- Homo LumoDocument12 pagesHomo LumoShivam KansaraNo ratings yet
- Geotextiles and Geomembranes 48 (2020) 110-119Document10 pagesGeotextiles and Geomembranes 48 (2020) 110-119Alexander RiosNo ratings yet
- EC100Document2 pagesEC100Esfan GaripNo ratings yet
- DCVD03Document52 pagesDCVD03Khin Myint WaiNo ratings yet
- VARC QUESTIONS (3) (AutoRecovered)Document56 pagesVARC QUESTIONS (3) (AutoRecovered)GomishChawlaNo ratings yet
- 1-Nature and Elements of CommunicationDocument26 pages1-Nature and Elements of CommunicationCris VillarbaNo ratings yet
- 11.0 Pressure Transmitter CalibrationDocument7 pages11.0 Pressure Transmitter CalibrationISAACNo ratings yet
- Further Reading Practice TestsDocument19 pagesFurther Reading Practice TestsGia Quỳnh 7/1No ratings yet
- Ead 530 C Clinical Field Experience A Informal ObservationsDocument3 pagesEad 530 C Clinical Field Experience A Informal Observationsapi-600970566No ratings yet
- Herbert Simon Model of Decision MakingDocument3 pagesHerbert Simon Model of Decision MakingSachin Raikar100% (2)
- SAP SD - CertifiedDocument3 pagesSAP SD - Certifiedamit25feb.guptaNo ratings yet
- PLM150 EngineeringChangeAndConfigurationManagementDocument226 pagesPLM150 EngineeringChangeAndConfigurationManagementఈశ్వర్ భరణిNo ratings yet
- Animation ProjectDocument10 pagesAnimation Projectapi-463943503No ratings yet
- Solutions To Revision Exercise 14: (Ho Soo Thong & Khor Nyak Hiong's Panpac Additional Mathematics)Document6 pagesSolutions To Revision Exercise 14: (Ho Soo Thong & Khor Nyak Hiong's Panpac Additional Mathematics)Lim Kew ChongNo ratings yet