
Mom 16
Mom 16
You might also like
- Tuff-Torq k92 Service ManualDocument55 pagesTuff-Torq k92 Service ManualKevins Small Engine and Tractor Service100% (3)
- 16' X 22' Ball Mill Installation ManualDocument54 pages16' X 22' Ball Mill Installation Manualpataza011100% (3)
- Mom21 Static ForceDocument23 pagesMom21 Static ForceWan NoraimanNo ratings yet
- Equilibrium of A Rigid Body Rigid BodyDocument41 pagesEquilibrium of A Rigid Body Rigid BodyJean Zyrelle AuronNo ratings yet
- Equilibrium of Rigid BodiesDocument8 pagesEquilibrium of Rigid BodiesmicaelahsdNo ratings yet
- Kinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong ThiamDocument30 pagesKinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- ES 11 Module04 1Document35 pagesES 11 Module04 1Therese SibayanNo ratings yet
- Dynamics of Machinery: DefinitionsDocument52 pagesDynamics of Machinery: Definitionsemre ozdemirNo ratings yet
- Lecture-Kinetics of Particles Newton S 2nd Law3-1Document28 pagesLecture-Kinetics of Particles Newton S 2nd Law3-1Alyssa NavarroNo ratings yet
- Lab Manual - 1Document43 pagesLab Manual - 1Nabeel AhmedNo ratings yet
- ME 533 Unit 1 Static Force AnalysisDocument35 pagesME 533 Unit 1 Static Force AnalysisPalPandianPNo ratings yet
- Mech E1 - CHAPTER 2 (Resultant of Force Systems)Document35 pagesMech E1 - CHAPTER 2 (Resultant of Force Systems)vj5agdalesNo ratings yet
- STATDocument9 pagesSTATJohn KinnNo ratings yet
- Engg Mech Chapter 3Document24 pagesEngg Mech Chapter 3Mark John OgagNo ratings yet
- DOM-I-Force Analysis PDFDocument26 pagesDOM-I-Force Analysis PDFNaveenKrishNo ratings yet
- Chapter 5 StaticDocument22 pagesChapter 5 Staticnur aisyahNo ratings yet
- Lecture24 - FORCE ANALYSIS OF MECHANISMSDocument8 pagesLecture24 - FORCE ANALYSIS OF MECHANISMSShivaniNo ratings yet
- Lab 3 - Bending Moment Diagrams (Copy)Document8 pagesLab 3 - Bending Moment Diagrams (Copy)Mohib ShareefNo ratings yet
- Lecture 26-28 Kinetics of Particles PDFDocument76 pagesLecture 26-28 Kinetics of Particles PDFRohan MittalNo ratings yet
- Kns1633 Kinetics of Particle: Force & Acceleration: Mr. Abdul Azim Abdullah Civil Engineering Department, UnimasDocument47 pagesKns1633 Kinetics of Particle: Force & Acceleration: Mr. Abdul Azim Abdullah Civil Engineering Department, UnimasSek Chin JiNo ratings yet
- Lab 2 Cantilever Shear Force Apparatus and Simply Supported BeamsDocument11 pagesLab 2 Cantilever Shear Force Apparatus and Simply Supported BeamsChing Wai YongNo ratings yet
- Coplanar & Non Coplanar Force Systems PDFDocument23 pagesCoplanar & Non Coplanar Force Systems PDFMohammed Sumer50% (2)
- Engineering Mechanics A NotesDocument8 pagesEngineering Mechanics A NotesTourlêy MunroNo ratings yet
- Coplanar Non Concurrent Force SystemsDocument23 pagesCoplanar Non Concurrent Force SystemsLester MarquezNo ratings yet
- Chapter 5 - PDFDocument47 pagesChapter 5 - PDFFiras Abu taleb100% (1)
- Equilibrium of A Particle PDFDocument16 pagesEquilibrium of A Particle PDFCristopher GonzagaNo ratings yet
- Chapter 5. Equilibrium of Beams: MAE314 Solid Mechanics Fall, 2008Document17 pagesChapter 5. Equilibrium of Beams: MAE314 Solid Mechanics Fall, 2008Ben BritoNo ratings yet
- Resultant of Force Systems: Statics of Rigid Bodies Engr. Brenz Eduard C. IlaganDocument8 pagesResultant of Force Systems: Statics of Rigid Bodies Engr. Brenz Eduard C. Ilaganyonki minNo ratings yet
- Kinetics of ParticlesDocument63 pagesKinetics of ParticlesGIAN EMMANUELLE SANCHEZNo ratings yet
- Chapter 3 - Equilibrium of Particles: ObjectivesDocument17 pagesChapter 3 - Equilibrium of Particles: ObjectivesRhey LuceroNo ratings yet
- Equilibrium of Force SystemsDocument6 pagesEquilibrium of Force SystemsJommarVocalTagalogNo ratings yet
- Chapter 3 - Equilibrium of Particles: ObjectivesDocument6 pagesChapter 3 - Equilibrium of Particles: ObjectivesRhey LuceroNo ratings yet
- Statics Chapter 4Document11 pagesStatics Chapter 4aniceto labianNo ratings yet
- JJ205 Engineering Mechanic Chapter 3 Jj205Document5 pagesJJ205 Engineering Mechanic Chapter 3 Jj205Ah TiangNo ratings yet
- Chapter 3-1Document64 pagesChapter 3-1Darsh MenonNo ratings yet
- Engineering Mechanics: StaticsDocument69 pagesEngineering Mechanics: StaticsEBRAHIMABDULLAHNo ratings yet
- Balancing of Reciprocating and Rotating MassesDocument24 pagesBalancing of Reciprocating and Rotating MassesSomnath SomadderNo ratings yet
- Lab 3 - Bending Moment DiagramsDocument9 pagesLab 3 - Bending Moment DiagramsTaha KhanNo ratings yet
- Static Force AnalysisDocument39 pagesStatic Force AnalysisShrikant BhoyarNo ratings yet
- Dynamic LectureDocument99 pagesDynamic LecturePob ParatNo ratings yet
- Scalars and Vectors: ScalarDocument22 pagesScalars and Vectors: Scalarsuwilanji kawambaleNo ratings yet
- Chapter - 1 - Static Force Analysis PDFDocument29 pagesChapter - 1 - Static Force Analysis PDFSourabh JangraNo ratings yet
- Ind 2472 Analysis Forces AnnexDocument15 pagesInd 2472 Analysis Forces AnnexDuncan josefNo ratings yet
- Vector Mechanics For Engineers Dynamics 11th Edition 3chDocument28 pagesVector Mechanics For Engineers Dynamics 11th Edition 3ch양한마리No ratings yet
- Chapter - 12 - 0 MathematicsDocument55 pagesChapter - 12 - 0 MathematicsJoyce HerreraNo ratings yet
- ME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Document9 pagesME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Adam NortonNo ratings yet
- Chapter 3-Equilibriu of ParticlesDocument102 pagesChapter 3-Equilibriu of ParticlesMohammed Al-OdatNo ratings yet
- Ch03 Equilibrium of A ParticleDocument44 pagesCh03 Equilibrium of A Particlewu910607No ratings yet
- Force Analysis of MechanismsDocument6 pagesForce Analysis of MechanismsIop PoiNo ratings yet
- Theory of Machines - LabSheetDocument20 pagesTheory of Machines - LabSheetBitzerNo ratings yet
- 15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsDocument21 pages15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsAashrith VNo ratings yet
- Me273 Unit2 Kinetics Unit2Document30 pagesMe273 Unit2 Kinetics Unit2Prince ObengNo ratings yet
- Statics and Dynamics Chapter 3Document22 pagesStatics and Dynamics Chapter 3Sh ErazNo ratings yet
- CH 3 EquilibriumDocument22 pagesCH 3 Equilibriummohamad fitri F2008No ratings yet
- Force Vectors: Scalars and Vectors 2D and 3D Force SystemsDocument20 pagesForce Vectors: Scalars and Vectors 2D and 3D Force Systemsdanaluca2753No ratings yet
- g481 1 2 3 EquilibriumDocument9 pagesg481 1 2 3 Equilibriumapi-236179294No ratings yet
- SSC-Theory of MachineDocument75 pagesSSC-Theory of MachineSteph Dela MujerNo ratings yet
- Force System and ResultantDocument20 pagesForce System and ResultantMyra GarciaNo ratings yet
- Mom 15Document64 pagesMom 15Najwan AzitNo ratings yet
- Mechanics of Machines: Acceleration AnalysisDocument19 pagesMechanics of Machines: Acceleration AnalysisNajwan AzitNo ratings yet
- Mom 13Document27 pagesMom 13Najwan AzitNo ratings yet
- Mechanics of Machines: DR Tuan Mohammad Yusoff ShahDocument31 pagesMechanics of Machines: DR Tuan Mohammad Yusoff ShahNajwan AzitNo ratings yet
- Mechanics of Machines: Degrees of Freedom & Motion ActuatorsDocument36 pagesMechanics of Machines: Degrees of Freedom & Motion ActuatorsNajwan AzitNo ratings yet
- Mechanics of Machines: 4-Bar Linkages & Other Common MechanismsDocument29 pagesMechanics of Machines: 4-Bar Linkages & Other Common MechanismsNajwan AzitNo ratings yet
- Mom 11Document10 pagesMom 11Najwan AzitNo ratings yet
- Mom 07Document28 pagesMom 07Najwan AzitNo ratings yet
- Mom 08Document18 pagesMom 08Najwan AzitNo ratings yet
- Euro Iv - Himalayan Ls410 Service ManualDocument130 pagesEuro Iv - Himalayan Ls410 Service ManualANOOPVA100% (1)
- GlossaryDocument4 pagesGlossaryagvassNo ratings yet
- 07 Konik Helisel Disli Tip Reduktorlu Motorlar Katalog PDFDocument226 pages07 Konik Helisel Disli Tip Reduktorlu Motorlar Katalog PDFmustofamustofamustofNo ratings yet
- Design of Gearbox (Speed Reducers) : Motor Machine Tools & Engine Road WheelsDocument19 pagesDesign of Gearbox (Speed Reducers) : Motor Machine Tools & Engine Road WheelsSurya Prakash100% (5)
- Yanmar PDFDocument13 pagesYanmar PDFmarcosluna6850% (2)
- Series: Cti-Certified Induced Draught Counterflow Pultruded FRP Cooling TowerDocument12 pagesSeries: Cti-Certified Induced Draught Counterflow Pultruded FRP Cooling TowerAnbarasan NagarajanNo ratings yet
- Design and FabricationDocument61 pagesDesign and FabricationAshish KohaleNo ratings yet
- Cat 14 M Motor GraderDocument28 pagesCat 14 M Motor GraderYudhi Salman Dwi Satya0% (2)
- 2-4d92660558690 2 PDFDocument2 pages2-4d92660558690 2 PDFCindy AyenNo ratings yet
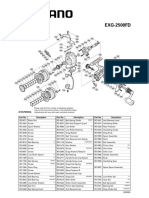
- Exage 2500fd 13exg2500fd-RkvDocument1 pageExage 2500fd 13exg2500fd-RkvLeonardo ManzoNo ratings yet
- Gearbox DesignDocument6 pagesGearbox DesignSumit ShindeNo ratings yet
- Elements of Gear Technology PDFDocument10 pagesElements of Gear Technology PDFGaneshan Mathan RajNo ratings yet
- Contact AnalysisDocument13 pagesContact AnalysiselectronicssucksNo ratings yet
- Tdi T50Y Service PDFDocument18 pagesTdi T50Y Service PDFJosé BelisarioNo ratings yet
- Power Shovel XC4100 P&H SpecDocument2 pagesPower Shovel XC4100 P&H SpecChristian Situmeang100% (1)
- Scansteering CatDocument16 pagesScansteering CatosamaNo ratings yet
- 12 - Hofmann - Self Aligning Drives Brochure - A4Document2 pages12 - Hofmann - Self Aligning Drives Brochure - A4Jorge VillalobosNo ratings yet
- Lecture 5 - Pumps PDFDocument8 pagesLecture 5 - Pumps PDFKyle SarmientoNo ratings yet
- Design of Transmission SystemsDocument3 pagesDesign of Transmission SystemsSaravanan KumarNo ratings yet
- Hybrid Transaxles and TransmissionsDocument109 pagesHybrid Transaxles and Transmissionscossatot100% (8)
- SSP - 225 Electro-Mechanical Power Steering SystemDocument24 pagesSSP - 225 Electro-Mechanical Power Steering SystemtekNo ratings yet
- ZF 4HP20 (LMO) : 4 SPEED FWD (Electronic Control) Code: 1019 000 XXXDocument5 pagesZF 4HP20 (LMO) : 4 SPEED FWD (Electronic Control) Code: 1019 000 XXXМихаил КаминскийNo ratings yet
- Variation of Root Bending Stress With Hob Nose Radius and Protuberance Based On Iso and Fem Methods For Spur GearsDocument18 pagesVariation of Root Bending Stress With Hob Nose Radius and Protuberance Based On Iso and Fem Methods For Spur GearsvijaykumarnNo ratings yet
- Gearing - ProblemsDocument7 pagesGearing - ProblemsmanuNo ratings yet
- Catalogo de Piezas Español 644jDocument700 pagesCatalogo de Piezas Español 644jELIZBANNo ratings yet
- I30 Parts Manual PDFDocument16 pagesI30 Parts Manual PDFDexter BothaNo ratings yet
- Main Landing Gear - Maintenance PracticesDocument22 pagesMain Landing Gear - Maintenance PracticesFrancisco GonzalezNo ratings yet
- Mechanical Reasoning Free Sample QuestionsDocument5 pagesMechanical Reasoning Free Sample QuestionsRahul PranzalNo ratings yet

































































































Download as pptx, pdf, or txt
You might also like
- Tuff-Torq k92 Service ManualDocument55 pagesTuff-Torq k92 Service ManualKevins Small Engine and Tractor Service100% (3)
- 16' X 22' Ball Mill Installation ManualDocument54 pages16' X 22' Ball Mill Installation Manualpataza011100% (3)
- Mom21 Static ForceDocument23 pagesMom21 Static ForceWan NoraimanNo ratings yet
- Equilibrium of A Rigid Body Rigid BodyDocument41 pagesEquilibrium of A Rigid Body Rigid BodyJean Zyrelle AuronNo ratings yet
- Equilibrium of Rigid BodiesDocument8 pagesEquilibrium of Rigid BodiesmicaelahsdNo ratings yet
- Kinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong ThiamDocument30 pagesKinetics of A Particle: Force and Acceleration (I) : by Dr. Toh Hoong Thiamnadia syahiraNo ratings yet
- ES 11 Module04 1Document35 pagesES 11 Module04 1Therese SibayanNo ratings yet
- Dynamics of Machinery: DefinitionsDocument52 pagesDynamics of Machinery: Definitionsemre ozdemirNo ratings yet
- Lecture-Kinetics of Particles Newton S 2nd Law3-1Document28 pagesLecture-Kinetics of Particles Newton S 2nd Law3-1Alyssa NavarroNo ratings yet
- Lab Manual - 1Document43 pagesLab Manual - 1Nabeel AhmedNo ratings yet
- ME 533 Unit 1 Static Force AnalysisDocument35 pagesME 533 Unit 1 Static Force AnalysisPalPandianPNo ratings yet
- Mech E1 - CHAPTER 2 (Resultant of Force Systems)Document35 pagesMech E1 - CHAPTER 2 (Resultant of Force Systems)vj5agdalesNo ratings yet
- STATDocument9 pagesSTATJohn KinnNo ratings yet
- Engg Mech Chapter 3Document24 pagesEngg Mech Chapter 3Mark John OgagNo ratings yet
- DOM-I-Force Analysis PDFDocument26 pagesDOM-I-Force Analysis PDFNaveenKrishNo ratings yet
- Chapter 5 StaticDocument22 pagesChapter 5 Staticnur aisyahNo ratings yet
- Lecture24 - FORCE ANALYSIS OF MECHANISMSDocument8 pagesLecture24 - FORCE ANALYSIS OF MECHANISMSShivaniNo ratings yet
- Lab 3 - Bending Moment Diagrams (Copy)Document8 pagesLab 3 - Bending Moment Diagrams (Copy)Mohib ShareefNo ratings yet
- Lecture 26-28 Kinetics of Particles PDFDocument76 pagesLecture 26-28 Kinetics of Particles PDFRohan MittalNo ratings yet
- Kns1633 Kinetics of Particle: Force & Acceleration: Mr. Abdul Azim Abdullah Civil Engineering Department, UnimasDocument47 pagesKns1633 Kinetics of Particle: Force & Acceleration: Mr. Abdul Azim Abdullah Civil Engineering Department, UnimasSek Chin JiNo ratings yet
- Lab 2 Cantilever Shear Force Apparatus and Simply Supported BeamsDocument11 pagesLab 2 Cantilever Shear Force Apparatus and Simply Supported BeamsChing Wai YongNo ratings yet
- Coplanar & Non Coplanar Force Systems PDFDocument23 pagesCoplanar & Non Coplanar Force Systems PDFMohammed Sumer50% (2)
- Engineering Mechanics A NotesDocument8 pagesEngineering Mechanics A NotesTourlêy MunroNo ratings yet
- Coplanar Non Concurrent Force SystemsDocument23 pagesCoplanar Non Concurrent Force SystemsLester MarquezNo ratings yet
- Chapter 5 - PDFDocument47 pagesChapter 5 - PDFFiras Abu taleb100% (1)
- Equilibrium of A Particle PDFDocument16 pagesEquilibrium of A Particle PDFCristopher GonzagaNo ratings yet
- Chapter 5. Equilibrium of Beams: MAE314 Solid Mechanics Fall, 2008Document17 pagesChapter 5. Equilibrium of Beams: MAE314 Solid Mechanics Fall, 2008Ben BritoNo ratings yet
- Resultant of Force Systems: Statics of Rigid Bodies Engr. Brenz Eduard C. IlaganDocument8 pagesResultant of Force Systems: Statics of Rigid Bodies Engr. Brenz Eduard C. Ilaganyonki minNo ratings yet
- Kinetics of ParticlesDocument63 pagesKinetics of ParticlesGIAN EMMANUELLE SANCHEZNo ratings yet
- Chapter 3 - Equilibrium of Particles: ObjectivesDocument17 pagesChapter 3 - Equilibrium of Particles: ObjectivesRhey LuceroNo ratings yet
- Equilibrium of Force SystemsDocument6 pagesEquilibrium of Force SystemsJommarVocalTagalogNo ratings yet
- Chapter 3 - Equilibrium of Particles: ObjectivesDocument6 pagesChapter 3 - Equilibrium of Particles: ObjectivesRhey LuceroNo ratings yet
- Statics Chapter 4Document11 pagesStatics Chapter 4aniceto labianNo ratings yet
- JJ205 Engineering Mechanic Chapter 3 Jj205Document5 pagesJJ205 Engineering Mechanic Chapter 3 Jj205Ah TiangNo ratings yet
- Chapter 3-1Document64 pagesChapter 3-1Darsh MenonNo ratings yet
- Engineering Mechanics: StaticsDocument69 pagesEngineering Mechanics: StaticsEBRAHIMABDULLAHNo ratings yet
- Balancing of Reciprocating and Rotating MassesDocument24 pagesBalancing of Reciprocating and Rotating MassesSomnath SomadderNo ratings yet
- Lab 3 - Bending Moment DiagramsDocument9 pagesLab 3 - Bending Moment DiagramsTaha KhanNo ratings yet
- Static Force AnalysisDocument39 pagesStatic Force AnalysisShrikant BhoyarNo ratings yet
- Dynamic LectureDocument99 pagesDynamic LecturePob ParatNo ratings yet
- Scalars and Vectors: ScalarDocument22 pagesScalars and Vectors: Scalarsuwilanji kawambaleNo ratings yet
- Chapter - 1 - Static Force Analysis PDFDocument29 pagesChapter - 1 - Static Force Analysis PDFSourabh JangraNo ratings yet
- Ind 2472 Analysis Forces AnnexDocument15 pagesInd 2472 Analysis Forces AnnexDuncan josefNo ratings yet
- Vector Mechanics For Engineers Dynamics 11th Edition 3chDocument28 pagesVector Mechanics For Engineers Dynamics 11th Edition 3ch양한마리No ratings yet
- Chapter - 12 - 0 MathematicsDocument55 pagesChapter - 12 - 0 MathematicsJoyce HerreraNo ratings yet
- ME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Document9 pagesME111 1.1 The Mechanical Design Process: 9/27/00 ME111 Lecture 1 1 9/27/00 ME111 Lecture 1 2Adam NortonNo ratings yet
- Chapter 3-Equilibriu of ParticlesDocument102 pagesChapter 3-Equilibriu of ParticlesMohammed Al-OdatNo ratings yet
- Ch03 Equilibrium of A ParticleDocument44 pagesCh03 Equilibrium of A Particlewu910607No ratings yet
- Force Analysis of MechanismsDocument6 pagesForce Analysis of MechanismsIop PoiNo ratings yet
- Theory of Machines - LabSheetDocument20 pagesTheory of Machines - LabSheetBitzerNo ratings yet
- 15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsDocument21 pages15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsAashrith VNo ratings yet
- Me273 Unit2 Kinetics Unit2Document30 pagesMe273 Unit2 Kinetics Unit2Prince ObengNo ratings yet
- Statics and Dynamics Chapter 3Document22 pagesStatics and Dynamics Chapter 3Sh ErazNo ratings yet
- CH 3 EquilibriumDocument22 pagesCH 3 Equilibriummohamad fitri F2008No ratings yet
- Force Vectors: Scalars and Vectors 2D and 3D Force SystemsDocument20 pagesForce Vectors: Scalars and Vectors 2D and 3D Force Systemsdanaluca2753No ratings yet
- g481 1 2 3 EquilibriumDocument9 pagesg481 1 2 3 Equilibriumapi-236179294No ratings yet
- SSC-Theory of MachineDocument75 pagesSSC-Theory of MachineSteph Dela MujerNo ratings yet
- Force System and ResultantDocument20 pagesForce System and ResultantMyra GarciaNo ratings yet
- Mom 15Document64 pagesMom 15Najwan AzitNo ratings yet
- Mechanics of Machines: Acceleration AnalysisDocument19 pagesMechanics of Machines: Acceleration AnalysisNajwan AzitNo ratings yet
- Mom 13Document27 pagesMom 13Najwan AzitNo ratings yet
- Mechanics of Machines: DR Tuan Mohammad Yusoff ShahDocument31 pagesMechanics of Machines: DR Tuan Mohammad Yusoff ShahNajwan AzitNo ratings yet
- Mechanics of Machines: Degrees of Freedom & Motion ActuatorsDocument36 pagesMechanics of Machines: Degrees of Freedom & Motion ActuatorsNajwan AzitNo ratings yet
- Mechanics of Machines: 4-Bar Linkages & Other Common MechanismsDocument29 pagesMechanics of Machines: 4-Bar Linkages & Other Common MechanismsNajwan AzitNo ratings yet
- Mom 11Document10 pagesMom 11Najwan AzitNo ratings yet
- Mom 07Document28 pagesMom 07Najwan AzitNo ratings yet
- Mom 08Document18 pagesMom 08Najwan AzitNo ratings yet
- Euro Iv - Himalayan Ls410 Service ManualDocument130 pagesEuro Iv - Himalayan Ls410 Service ManualANOOPVA100% (1)
- GlossaryDocument4 pagesGlossaryagvassNo ratings yet
- 07 Konik Helisel Disli Tip Reduktorlu Motorlar Katalog PDFDocument226 pages07 Konik Helisel Disli Tip Reduktorlu Motorlar Katalog PDFmustofamustofamustofNo ratings yet
- Design of Gearbox (Speed Reducers) : Motor Machine Tools & Engine Road WheelsDocument19 pagesDesign of Gearbox (Speed Reducers) : Motor Machine Tools & Engine Road WheelsSurya Prakash100% (5)
- Yanmar PDFDocument13 pagesYanmar PDFmarcosluna6850% (2)
- Series: Cti-Certified Induced Draught Counterflow Pultruded FRP Cooling TowerDocument12 pagesSeries: Cti-Certified Induced Draught Counterflow Pultruded FRP Cooling TowerAnbarasan NagarajanNo ratings yet
- Design and FabricationDocument61 pagesDesign and FabricationAshish KohaleNo ratings yet
- Cat 14 M Motor GraderDocument28 pagesCat 14 M Motor GraderYudhi Salman Dwi Satya0% (2)
- 2-4d92660558690 2 PDFDocument2 pages2-4d92660558690 2 PDFCindy AyenNo ratings yet
- Exage 2500fd 13exg2500fd-RkvDocument1 pageExage 2500fd 13exg2500fd-RkvLeonardo ManzoNo ratings yet
- Gearbox DesignDocument6 pagesGearbox DesignSumit ShindeNo ratings yet
- Elements of Gear Technology PDFDocument10 pagesElements of Gear Technology PDFGaneshan Mathan RajNo ratings yet
- Contact AnalysisDocument13 pagesContact AnalysiselectronicssucksNo ratings yet
- Tdi T50Y Service PDFDocument18 pagesTdi T50Y Service PDFJosé BelisarioNo ratings yet
- Power Shovel XC4100 P&H SpecDocument2 pagesPower Shovel XC4100 P&H SpecChristian Situmeang100% (1)
- Scansteering CatDocument16 pagesScansteering CatosamaNo ratings yet
- 12 - Hofmann - Self Aligning Drives Brochure - A4Document2 pages12 - Hofmann - Self Aligning Drives Brochure - A4Jorge VillalobosNo ratings yet
- Lecture 5 - Pumps PDFDocument8 pagesLecture 5 - Pumps PDFKyle SarmientoNo ratings yet
- Design of Transmission SystemsDocument3 pagesDesign of Transmission SystemsSaravanan KumarNo ratings yet
- Hybrid Transaxles and TransmissionsDocument109 pagesHybrid Transaxles and Transmissionscossatot100% (8)
- SSP - 225 Electro-Mechanical Power Steering SystemDocument24 pagesSSP - 225 Electro-Mechanical Power Steering SystemtekNo ratings yet
- ZF 4HP20 (LMO) : 4 SPEED FWD (Electronic Control) Code: 1019 000 XXXDocument5 pagesZF 4HP20 (LMO) : 4 SPEED FWD (Electronic Control) Code: 1019 000 XXXМихаил КаминскийNo ratings yet
- Variation of Root Bending Stress With Hob Nose Radius and Protuberance Based On Iso and Fem Methods For Spur GearsDocument18 pagesVariation of Root Bending Stress With Hob Nose Radius and Protuberance Based On Iso and Fem Methods For Spur GearsvijaykumarnNo ratings yet
- Gearing - ProblemsDocument7 pagesGearing - ProblemsmanuNo ratings yet
- Catalogo de Piezas Español 644jDocument700 pagesCatalogo de Piezas Español 644jELIZBANNo ratings yet
- I30 Parts Manual PDFDocument16 pagesI30 Parts Manual PDFDexter BothaNo ratings yet
- Main Landing Gear - Maintenance PracticesDocument22 pagesMain Landing Gear - Maintenance PracticesFrancisco GonzalezNo ratings yet
- Mechanical Reasoning Free Sample QuestionsDocument5 pagesMechanical Reasoning Free Sample QuestionsRahul PranzalNo ratings yet