Download as ppt, pdf, or txt
You might also like
- Digital Design Interview QuestionsDocument47 pagesDigital Design Interview QuestionsSangameshwer Enterprises100% (1)
- EE 215 - Laboratory 4 - First Order Circuits: AuthorsDocument6 pagesEE 215 - Laboratory 4 - First Order Circuits: AuthorsÁo ĐenNo ratings yet
- The Basics of Analog SensorDocument6 pagesThe Basics of Analog Sensormatrixworld20No ratings yet
- Interview QuestionsDocument27 pagesInterview QuestionsRui ChenNo ratings yet
- Answer: Q1Document46 pagesAnswer: Q1amar2k904100% (3)
- Lab #1 Logic Gates: ObjectiveDocument6 pagesLab #1 Logic Gates: ObjectiveZbiggNo ratings yet
- Chapter 3Document48 pagesChapter 3Anonymous gML5pHNo ratings yet
- Nyquist-Rate A/D ConvertersDocument4 pagesNyquist-Rate A/D ConvertersAli AhmadNo ratings yet
- Digital Logic Level: Ms - Chit Su MonDocument74 pagesDigital Logic Level: Ms - Chit Su MonAjharuddin AnsariNo ratings yet
- Electronics Hardware Questions : Answers & Follow UpsDocument12 pagesElectronics Hardware Questions : Answers & Follow UpsJayachandra MakannavarNo ratings yet
- Counters and ClocksDocument12 pagesCounters and ClocksJoseGarciaRuizNo ratings yet
- Chapter 1: Digital Logic: I. OverviewDocument10 pagesChapter 1: Digital Logic: I. OverviewNihalNo ratings yet
- Digital Design Interview QuestionsDocument12 pagesDigital Design Interview QuestionsUday Udu100% (8)
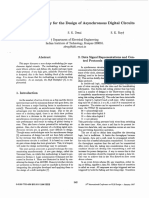
- A New Methodology The Design of Asynchronous Digital CircuitsDocument6 pagesA New Methodology The Design of Asynchronous Digital CircuitsAnupam DasNo ratings yet
- Lecture 6: Time-Dependent Behaviour of Digital Circuits: Source Load DDocument5 pagesLecture 6: Time-Dependent Behaviour of Digital Circuits: Source Load DTaqi Shah100% (1)
- Unit 3Document74 pagesUnit 3211220017No ratings yet
- Ch03 Digital LogicDocument53 pagesCh03 Digital LogicKarthikeyan RamajayamNo ratings yet
- ADCDACDocument180 pagesADCDACKireetiNo ratings yet
- Digital Logic DesignDocument3 pagesDigital Logic Designthatflamyguy2216No ratings yet
- Lecture2 DFDocument20 pagesLecture2 DFShimaa ZeinNo ratings yet
- Interview Questions 1Document40 pagesInterview Questions 1Shru GopalNo ratings yet
- Computer Networks (CS425) : Data EncodingDocument7 pagesComputer Networks (CS425) : Data EncodingAnish VeettiyankalNo ratings yet
- Project 2 ElectronicDocument23 pagesProject 2 ElectronicOmar Eduardo Rios GuzmanNo ratings yet
- Unit - 4 ADCDocument40 pagesUnit - 4 ADCECEHOD SECNo ratings yet
- CC118 Computer Organization and ArchitectureDocument4 pagesCC118 Computer Organization and Architecturesajan gcNo ratings yet
- CC118 Computer Organization and ArchitectureDocument4 pagesCC118 Computer Organization and Architecturesajan gcNo ratings yet
- Design and Characterization of NULL Convention Arithmetic Logic UnitsDocument7 pagesDesign and Characterization of NULL Convention Arithmetic Logic UnitsJayaram KumarNo ratings yet
- 3.physical Layer (Contd) - Data EncodingDocument6 pages3.physical Layer (Contd) - Data Encodingde veronNo ratings yet
- Laboratory Manual Course Code:Ece 201Document41 pagesLaboratory Manual Course Code:Ece 201Er Sacchu SrivastavaNo ratings yet
- VLSI & ASIC Digital Design Interview QuestionsDocument6 pagesVLSI & ASIC Digital Design Interview QuestionsRupesh Kumar DuttaNo ratings yet
- Design of Analog & Mixed Mode Vlsi Circuits 6 (Compatibility Mode)Document44 pagesDesign of Analog & Mixed Mode Vlsi Circuits 6 (Compatibility Mode)rahul_agarwal_15No ratings yet
- Cadence - Virtuoso: Amity UniversityDocument27 pagesCadence - Virtuoso: Amity UniversityAkhil Aggarwal100% (1)
- Working With The 555Document8 pagesWorking With The 555Sandhya DeviNo ratings yet
- EE215 Lab 4Document6 pagesEE215 Lab 4vhiep195No ratings yet
- MANUAL COMMUNICATION LAB-II, KEC-651,2020-21, Even SemDocument18 pagesMANUAL COMMUNICATION LAB-II, KEC-651,2020-21, Even SemPiyushNo ratings yet
- L #6: L C C S L G: Sfsu - E 301 - E L AB Ogic Ircuit Haracteristics and Imple Ogic AtesDocument11 pagesL #6: L C C S L G: Sfsu - E 301 - E L AB Ogic Ircuit Haracteristics and Imple Ogic AtesRudra MishraNo ratings yet
- Digital Circuits: A.Hari Ram Faculty-L&D (Technical) Corporate & Industry RelationsDocument64 pagesDigital Circuits: A.Hari Ram Faculty-L&D (Technical) Corporate & Industry RelationsJanani RangarajanNo ratings yet
- DAC AnalysisDocument19 pagesDAC Analysisమురళీధర్ ఆది ఆంధ్రుడుNo ratings yet
- Dac Adc FileDocument66 pagesDac Adc FileKhushbu JoshiNo ratings yet
- Com Bi National Logic CircuitsDocument28 pagesCom Bi National Logic CircuitshksaifeeNo ratings yet
- 2449 Ex3Document5 pages2449 Ex3lewissikanyika35No ratings yet
- ECEN 1400 Lab 6 Counters PDFDocument4 pagesECEN 1400 Lab 6 Counters PDFMK KhnNo ratings yet
- Digital Electronics Tutorial Sheet-1Document13 pagesDigital Electronics Tutorial Sheet-1shraddhabansalNo ratings yet
- Data Encoding: Digital Data To Analog SignalsDocument8 pagesData Encoding: Digital Data To Analog Signalsnilesh kumarNo ratings yet
- QP CODE 21103239 DE December 2021Document8 pagesQP CODE 21103239 DE December 2021AsjathNo ratings yet
- Digital Coding of Signals: ClippingDocument15 pagesDigital Coding of Signals: ClippingGurkaranjot SinghNo ratings yet
- Transistor Matching - Ian Fritz - Transmat0011 - 144Document5 pagesTransistor Matching - Ian Fritz - Transmat0011 - 144crackintheshatNo ratings yet
- Lecture 4 - Analogue To Digital ConversionDocument8 pagesLecture 4 - Analogue To Digital ConversionnoniNo ratings yet
- Analog To Digital ConverterDocument11 pagesAnalog To Digital ConverterFf Fr100% (1)
- Latches&FlipflopsDocument20 pagesLatches&FlipflopsAjay G Bellam100% (1)
- PIC16F84 Based LC MeterDocument3 pagesPIC16F84 Based LC MeterPravin Bhole100% (2)
- E2.11/ISE2.22 - Digital Electronics IIDocument3 pagesE2.11/ISE2.22 - Digital Electronics IIreddygjNo ratings yet
- Experiment: Vindhya Institute of Technology & ScienceDocument6 pagesExperiment: Vindhya Institute of Technology & ScienceGarima SarafNo ratings yet
- Reversible Logic Circuit Synthesis: Vivek V. Shende, Aditya K. Prasad, Igor L. Markov and John P. HayesDocument50 pagesReversible Logic Circuit Synthesis: Vivek V. Shende, Aditya K. Prasad, Igor L. Markov and John P. HayesL B Om PrakashNo ratings yet
- Experiment 6 Electronic SwitchingDocument18 pagesExperiment 6 Electronic SwitchingrekcahNo ratings yet
- PC Interfacing Fourth Level Lecture Twelve Adcs Converter With Parallel I/O InterfaceDocument8 pagesPC Interfacing Fourth Level Lecture Twelve Adcs Converter With Parallel I/O InterfaceaaaaNo ratings yet
- SDIC Important QuestionsDocument8 pagesSDIC Important Questionsgvlatchoumi11No ratings yet
- Computer Science Notes: Digital and Analogue Circuit DesignDocument52 pagesComputer Science Notes: Digital and Analogue Circuit DesignMuhammedNo ratings yet
- To Study Electronic Components Such As Resistors, Capacitors, Diodes, Transistors and IcsDocument20 pagesTo Study Electronic Components Such As Resistors, Capacitors, Diodes, Transistors and IcssamkousNo ratings yet
- Mips Practice QuestionsDocument5 pagesMips Practice QuestionsManzar AliNo ratings yet
- TNEFDocument47 pagesTNEFAlexandru Octavian GrosuNo ratings yet
- Taller Mdh-Horner 1 PDFDocument3 pagesTaller Mdh-Horner 1 PDFFelipe GustinNo ratings yet
- Web Design-Handbook PDFDocument56 pagesWeb Design-Handbook PDFMomo SemerkhetNo ratings yet
- Sample Paper Junior ClerkDocument6 pagesSample Paper Junior Clerkqaiser shakoorNo ratings yet
- Adsterra Native Ads GuideDocument2 pagesAdsterra Native Ads GuideManu SiaNo ratings yet
- Search Technology 85519 13oct2017Document246 pagesSearch Technology 85519 13oct2017Anonymous oIfA1zfNo ratings yet
- WWW Proxycap ComDocument5 pagesWWW Proxycap ComMauricio QuimizNo ratings yet
- How To Get Text and A Variable in A Messagebox - Stack OverflowDocument3 pagesHow To Get Text and A Variable in A Messagebox - Stack OverflowKrishanu ModakNo ratings yet
- Oxford Instruments EDX Instruction ManualDocument1 pageOxford Instruments EDX Instruction ManualGruffbabyNo ratings yet
- Midterm ExamDocument6 pagesMidterm ExamelmoreillyNo ratings yet
- Main SCMDocument3,420 pagesMain SCMJoãoXavierNo ratings yet
- Powers Hell Command Tore NameDocument3 pagesPowers Hell Command Tore NameRevan GNo ratings yet
- LTK - A Lisp Binding To The TK Toolkit: Peter Herth February 5, 2006Document65 pagesLTK - A Lisp Binding To The TK Toolkit: Peter Herth February 5, 2006Yordan Sullca PalominoNo ratings yet
- Lesson 1 Introduction To IctDocument35 pagesLesson 1 Introduction To IctDandreb Sardan100% (1)
- Programming Robots Inc 2011Document13 pagesProgramming Robots Inc 2011Ghassan MansourNo ratings yet
- DS - CO1007 - SEM - 232 - Assignment (Draft)Document6 pagesDS - CO1007 - SEM - 232 - Assignment (Draft)Khoa NguyễnNo ratings yet
- Gis in Defense PDFDocument72 pagesGis in Defense PDFAnonymous ciVEOMl83No ratings yet
- CB3491 NotesDocument192 pagesCB3491 NotesANITHARANI KNo ratings yet
- DP7000Document1 pageDP7000namhtsNo ratings yet
- Coins Pro APIDocument63 pagesCoins Pro APIJason PaquibulanNo ratings yet
- Kendall Sad9 Cpu 14 PDFDocument5 pagesKendall Sad9 Cpu 14 PDFBrandon DawggNo ratings yet
- Artificial Intelligence Question SetDocument2 pagesArtificial Intelligence Question Setbhesh chaudharyNo ratings yet
- HRIS@NissanDocument18 pagesHRIS@NissanPrashant SaxenaNo ratings yet
- 2:1: The Logic of Compound StatementsDocument2 pages2:1: The Logic of Compound StatementsNicholasLaffeyNo ratings yet
- Raid 6 Resync: Tests & TweaksDocument3 pagesRaid 6 Resync: Tests & TweaksaidanlinzNo ratings yet
- No. Page No.: 1.2 Database Management System 1.2 Information Retrieval and Database Querying 1.3 Ranking Based QueryingDocument27 pagesNo. Page No.: 1.2 Database Management System 1.2 Information Retrieval and Database Querying 1.3 Ranking Based QueryingPraman TyagiNo ratings yet
- Industry Framework and InfrastructureDocument14 pagesIndustry Framework and InfrastructureAshwani TyagiNo ratings yet
- OpenFrame Base 7 Fix#3 TSAM Guide v2.1.4 enDocument80 pagesOpenFrame Base 7 Fix#3 TSAM Guide v2.1.4 enborisg3No ratings yet
- Electronic BookDocument711 pagesElectronic Bookmhenley8059No ratings yet