
Hyoki Lee, Zach Zens Dr. Kim Pierson PH.D., Dr. Peter Bui PH.D
Hyoki Lee, Zach Zens Dr. Kim Pierson PH.D., Dr. Peter Bui PH.D
You might also like
- Communication Networks A Concise Introduction PDFDocument2 pagesCommunication Networks A Concise Introduction PDFBettyNo ratings yet
- Case Study Applying Expert Systems Technology To Testing Phase of Software Life CycleDocument5 pagesCase Study Applying Expert Systems Technology To Testing Phase of Software Life CycleNisha JhaNo ratings yet
- Software UavDocument6 pagesSoftware UavosbertswiderekbainomugishaNo ratings yet
- Micro Air Vehicle Link MAVlink in A Nutshell A SurDocument23 pagesMicro Air Vehicle Link MAVlink in A Nutshell A SurthendyNo ratings yet
- Paper C PDFDocument7 pagesPaper C PDFPhulturoo KhanNo ratings yet
- Research Article: COOPS: A Code Obfuscation Method Based On Obscuring Program SemanticsDocument15 pagesResearch Article: COOPS: A Code Obfuscation Method Based On Obscuring Program Semanticseto413199No ratings yet
- DC 9225 Exp2Document4 pagesDC 9225 Exp2Sankalp RaneNo ratings yet
- 4575Document10 pages4575RajeshNo ratings yet
- Implementationof Online Control Customizationwithinthe OpenDocument24 pagesImplementationof Online Control Customizationwithinthe OpenmohamedNo ratings yet
- TR 1338Document43 pagesTR 1338AlnatumNo ratings yet
- 10.18429 - JACoW ICALEPCS2019 WESH4003Document5 pages10.18429 - JACoW ICALEPCS2019 WESH4003Islam HemdanNo ratings yet
- The Java CAN A Java Gateway To Fieldbus CommunicationDocument7 pagesThe Java CAN A Java Gateway To Fieldbus CommunicationLuana SantosNo ratings yet
- The Java CAN A Java Gateway To Fieldbus CommunicationDocument7 pagesThe Java CAN A Java Gateway To Fieldbus CommunicationLuana SantosNo ratings yet
- Schwartz Remote Paper PDFDocument9 pagesSchwartz Remote Paper PDFrobertNo ratings yet
- Software Defect Prediction Via Convolutional Neural NetworkDocument11 pagesSoftware Defect Prediction Via Convolutional Neural NetworksmitapallaviNo ratings yet
- Switchware ArchitectureDocument9 pagesSwitchware ArchitectureVamshiKrishnaNo ratings yet
- Serial Communication Protocol For Embedded Applica PDFDocument4 pagesSerial Communication Protocol For Embedded Applica PDFMarco RamirezNo ratings yet
- Ravish ResumeDocument3 pagesRavish Resumeshakeeb ahmedNo ratings yet
- Qual Net TutorialDocument60 pagesQual Net TutorialBitan PramanikNo ratings yet
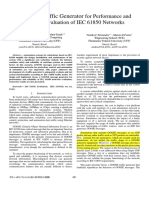
- Geese: A Traffic Generator: For Performance and Security Evaluation of IEC 61850 NetworksDocument6 pagesGeese: A Traffic Generator: For Performance and Security Evaluation of IEC 61850 NetworksAlemat TesfayNo ratings yet
- Vaps Ncom EstudieDocument6 pagesVaps Ncom EstudieHigor MaiaNo ratings yet
- 2015 - Authentication of MAV Communication Using Caesar Cipher CryptographyDocument6 pages2015 - Authentication of MAV Communication Using Caesar Cipher CryptographyHaris KhanNo ratings yet
- PARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingDocument3 pagesPARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingarchikakatiyarNo ratings yet
- Lec 15-16Document33 pagesLec 15-16Salma SolimanNo ratings yet
- BedRock Systems Ebook - Developing With Formal MethodsDocument14 pagesBedRock Systems Ebook - Developing With Formal MethodsjtpaaschNo ratings yet
- An MPEG 2 Decoder Case Study As A DriverDocument5 pagesAn MPEG 2 Decoder Case Study As A DriverHariniNo ratings yet
- Network Automation and Abstraction Using Python PRDocument9 pagesNetwork Automation and Abstraction Using Python PRzeeshanec09No ratings yet
- Privacy Preserving On Mobile Health Data in CloudDocument46 pagesPrivacy Preserving On Mobile Health Data in CloudVinoth ChitraNo ratings yet
- Network Automation and Abstraction Using Python Programming MethodsDocument9 pagesNetwork Automation and Abstraction Using Python Programming MethodsLAngel ReyesNo ratings yet
- Suspicious EmailDocument44 pagesSuspicious EmailishitaNo ratings yet
- PISCES: A Programmable, Protocol-Independent Software SwitchDocument14 pagesPISCES: A Programmable, Protocol-Independent Software SwitchRaplinNo ratings yet
- The Case For Reflective MiddlewareDocument10 pagesThe Case For Reflective Middlewarepj4allNo ratings yet
- Bring Ip Verification Closer To SocDocument9 pagesBring Ip Verification Closer To SocpriyajeejoNo ratings yet
- 1.IOT Application For Real-Time Monitor of PLC Data Using EPICSDocument5 pages1.IOT Application For Real-Time Monitor of PLC Data Using EPICSMaria CamargoNo ratings yet
- Chandra ResumeDocument6 pagesChandra ResumeAnitha ReddyNo ratings yet
- Compiling Occam Into Field-Programmable Gate Arrays: Ian Page and Wayne LukDocument13 pagesCompiling Occam Into Field-Programmable Gate Arrays: Ian Page and Wayne LukTamiltamil TamilNo ratings yet
- Amanrakesh ResumeDocument3 pagesAmanrakesh ResumeAman SrivastavaNo ratings yet
- A Survey On Application Layer Protocols For The Internet of Things Transaction On IoT and Cloud ComputingDocument7 pagesA Survey On Application Layer Protocols For The Internet of Things Transaction On IoT and Cloud ComputingMaria GonzalezNo ratings yet
- Software Defined RadioDocument28 pagesSoftware Defined RadioClassic PrintersNo ratings yet
- Machine Vision Using LabviewDocument8 pagesMachine Vision Using LabviewLokesh DnNo ratings yet
- SR - Sofware Engineer/ManagerDocument4 pagesSR - Sofware Engineer/Managerapi-121383275No ratings yet
- Transfer of Advanced Asaac SW Technology Onto The Eurofighter/TyphoonDocument5 pagesTransfer of Advanced Asaac SW Technology Onto The Eurofighter/TyphoonQuân LêNo ratings yet
- Amanrakesh ResumeDocument3 pagesAmanrakesh ResumeAman SrivastavaNo ratings yet
- Implementing The CANopen Protocol in A Multiple Node System in The BioBike For Motor Position ControlDocument7 pagesImplementing The CANopen Protocol in A Multiple Node System in The BioBike For Motor Position ControlVedant PrustyNo ratings yet
- Service Proxy With Load Balancing and Autoscaling For A Distributed Virtualization SystemDocument10 pagesService Proxy With Load Balancing and Autoscaling For A Distributed Virtualization SystemPablo PessolaniNo ratings yet
- A Software Architecture For Zero-Copy RPC in Java: Chi-Chao Chang and Thorsten Von EickenDocument16 pagesA Software Architecture For Zero-Copy RPC in Java: Chi-Chao Chang and Thorsten Von EickenWilfredo FelixNo ratings yet
- ABSTRACTDocument16 pagesABSTRACTHorlars LeeNo ratings yet
- "Drawing" Cryptosystems With CAL: PracticalitiesDocument1 page"Drawing" Cryptosystems With CAL: PracticalitiesWajdi ElhamziNo ratings yet
- Naveen ResumeDocument4 pagesNaveen ResumenaveenNo ratings yet
- Systemverilog Based Verification Environment For Wishbone Interface of Ahb-Wishbone BridgeDocument4 pagesSystemverilog Based Verification Environment For Wishbone Interface of Ahb-Wishbone Bridgemeghna veggalamNo ratings yet
- Go Mac PapDocument5 pagesGo Mac Papsyedsalman1984No ratings yet
- Sowmya TK Senior Software Engineer: ObjectiveDocument4 pagesSowmya TK Senior Software Engineer: Objectivesowmya tkNo ratings yet
- Wapnil Hanadrakant OndeDocument3 pagesWapnil Hanadrakant OndeRashmi TalrejaNo ratings yet
- Model Based Distributed Testing of Object Oriented Programs: SciencedirectDocument8 pagesModel Based Distributed Testing of Object Oriented Programs: SciencedirectDendyNo ratings yet
- Compiler Technology For Future MicroprocessorsDocument52 pagesCompiler Technology For Future MicroprocessorsBiswajit DasNo ratings yet
- Flowstalker: Comprehensive Traffic Flow Monitoring On The Data Plane Using P4Document6 pagesFlowstalker: Comprehensive Traffic Flow Monitoring On The Data Plane Using P4Angel Nicolas Arotoma PraviaNo ratings yet
- Hardware-Software Debugging Techniques For Reconfigurable Systems-on-ChipDocument6 pagesHardware-Software Debugging Techniques For Reconfigurable Systems-on-Chipsankar SNo ratings yet
- J2EE Software EnvironmentDocument20 pagesJ2EE Software EnvironmentsureshNo ratings yet
- SDN: Management and Orchestration Considerations: White PaperDocument13 pagesSDN: Management and Orchestration Considerations: White PaperTaha AlhatmiNo ratings yet
- Travel Bill Tracking SystemDocument69 pagesTravel Bill Tracking SystemVKM201350% (2)
- Mastering Python Network Automation: Automating Container Orchestration, Configuration, and Networking with Terraform, Calico, HAProxy, and IstioFrom EverandMastering Python Network Automation: Automating Container Orchestration, Configuration, and Networking with Terraform, Calico, HAProxy, and IstioNo ratings yet
- AWP Assignments NptelDocument26 pagesAWP Assignments NptelkolisettyvsureshNo ratings yet
- Tutorial - Globe at Home R01 Full Admin Access. - Pinoy Internet and Technology ForumsDocument8 pagesTutorial - Globe at Home R01 Full Admin Access. - Pinoy Internet and Technology ForumsAlfred Jamelarin0% (1)
- Lecture #2 Fundamentals of Cellular CommunicationDocument5 pagesLecture #2 Fundamentals of Cellular CommunicationMrs. Vasanthi Muniasamy100% (1)
- Nokia Siemens Networks Flexi MR 10 BTS Datasheet 19022013Document5 pagesNokia Siemens Networks Flexi MR 10 BTS Datasheet 19022013Joao SilvaNo ratings yet
- NSC 2007Document5 pagesNSC 2007andhracollegesNo ratings yet
- Implementing Complex MP-BGP Over-Lapping VPNsDocument67 pagesImplementing Complex MP-BGP Over-Lapping VPNskasqureshiNo ratings yet
- Wifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual CarefullyDocument24 pagesWifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual Carefullykari.junttilaNo ratings yet
- Music On Hold OverviewDocument36 pagesMusic On Hold OverviewgabeNo ratings yet
- Dap-1320 Manual 1.1 en PDFDocument72 pagesDap-1320 Manual 1.1 en PDFblezz2008No ratings yet
- Huawei Videoconferencing Recording and Streaming Engine RSE6500 DatasheetDocument2 pagesHuawei Videoconferencing Recording and Streaming Engine RSE6500 DatasheetAnonymous G1iPoNOKNo ratings yet
- Ceragon FibeAir 1500 - Operation and Installation ManualDocument137 pagesCeragon FibeAir 1500 - Operation and Installation ManualBrunoRFNo ratings yet
- Network Monitoring SystemDocument23 pagesNetwork Monitoring Systemjack_16No ratings yet
- Satellite NIM Tuner Module: Product RangeDocument2 pagesSatellite NIM Tuner Module: Product RangeHedenarol Ramirez RojasNo ratings yet
- Interoperable, Secure Group CommunicationDocument8 pagesInteroperable, Secure Group CommunicationraghavchNo ratings yet
- CCIE Security IGP, EGP AuthenticationDocument26 pagesCCIE Security IGP, EGP AuthenticationMd. Rashedul AlamNo ratings yet
- Panasonic KX ts3mxbDocument25 pagesPanasonic KX ts3mxbfahmy najibNo ratings yet
- 09 Huawei CloudEngine S6730-H Series Switches DatasheetDocument24 pages09 Huawei CloudEngine S6730-H Series Switches Datasheetjavier berengueNo ratings yet
- Multi Factor Authentication Whitepaper Arx - Intellect DesignDocument12 pagesMulti Factor Authentication Whitepaper Arx - Intellect DesignIntellect DesignNo ratings yet
- SkyEdge II ProDocument2 pagesSkyEdge II ProNo2MonkeyNo ratings yet
- Microstrip Patch Antenna (3.5 GHZ) : Ansari Fahad Bilal ZaheeruddinDocument5 pagesMicrostrip Patch Antenna (3.5 GHZ) : Ansari Fahad Bilal Zaheeruddinkadambari shindeNo ratings yet
- Lte Epc Ims Call FlowDocument17 pagesLte Epc Ims Call FlowSudip Bhowmik100% (1)
- 3.ZXMP M900Document70 pages3.ZXMP M900eyasu abebe adoNo ratings yet
- Leica GS15 BaseDocument7 pagesLeica GS15 Baseedusilva30No ratings yet
- Infinibad Cheat SheetDocument2 pagesInfinibad Cheat SheetSudhakar LakkarajuNo ratings yet
- Cisco Profinet-White-PaperDocument6 pagesCisco Profinet-White-Paperpatel_rajendraNo ratings yet
- Paradox 738 EX Programming GuideDocument12 pagesParadox 738 EX Programming GuideDan RaducanuNo ratings yet
- Dgca Module 13 July 17 1ST Session PDFDocument2 pagesDgca Module 13 July 17 1ST Session PDFa panda0% (1)
- NEC Topaz Quick Reference GuideDocument11 pagesNEC Topaz Quick Reference GuideAbdoukaderYassinNo ratings yet
- TEMS Discovery Device 11.1.2 Release Note PDFDocument18 pagesTEMS Discovery Device 11.1.2 Release Note PDFntphong0401@yahoo.com.vnNo ratings yet























































































Download as pptx, pdf, or txt
You might also like
- Communication Networks A Concise Introduction PDFDocument2 pagesCommunication Networks A Concise Introduction PDFBettyNo ratings yet
- Case Study Applying Expert Systems Technology To Testing Phase of Software Life CycleDocument5 pagesCase Study Applying Expert Systems Technology To Testing Phase of Software Life CycleNisha JhaNo ratings yet
- Software UavDocument6 pagesSoftware UavosbertswiderekbainomugishaNo ratings yet
- Micro Air Vehicle Link MAVlink in A Nutshell A SurDocument23 pagesMicro Air Vehicle Link MAVlink in A Nutshell A SurthendyNo ratings yet
- Paper C PDFDocument7 pagesPaper C PDFPhulturoo KhanNo ratings yet
- Research Article: COOPS: A Code Obfuscation Method Based On Obscuring Program SemanticsDocument15 pagesResearch Article: COOPS: A Code Obfuscation Method Based On Obscuring Program Semanticseto413199No ratings yet
- DC 9225 Exp2Document4 pagesDC 9225 Exp2Sankalp RaneNo ratings yet
- 4575Document10 pages4575RajeshNo ratings yet
- Implementationof Online Control Customizationwithinthe OpenDocument24 pagesImplementationof Online Control Customizationwithinthe OpenmohamedNo ratings yet
- TR 1338Document43 pagesTR 1338AlnatumNo ratings yet
- 10.18429 - JACoW ICALEPCS2019 WESH4003Document5 pages10.18429 - JACoW ICALEPCS2019 WESH4003Islam HemdanNo ratings yet
- The Java CAN A Java Gateway To Fieldbus CommunicationDocument7 pagesThe Java CAN A Java Gateway To Fieldbus CommunicationLuana SantosNo ratings yet
- The Java CAN A Java Gateway To Fieldbus CommunicationDocument7 pagesThe Java CAN A Java Gateway To Fieldbus CommunicationLuana SantosNo ratings yet
- Schwartz Remote Paper PDFDocument9 pagesSchwartz Remote Paper PDFrobertNo ratings yet
- Software Defect Prediction Via Convolutional Neural NetworkDocument11 pagesSoftware Defect Prediction Via Convolutional Neural NetworksmitapallaviNo ratings yet
- Switchware ArchitectureDocument9 pagesSwitchware ArchitectureVamshiKrishnaNo ratings yet
- Serial Communication Protocol For Embedded Applica PDFDocument4 pagesSerial Communication Protocol For Embedded Applica PDFMarco RamirezNo ratings yet
- Ravish ResumeDocument3 pagesRavish Resumeshakeeb ahmedNo ratings yet
- Qual Net TutorialDocument60 pagesQual Net TutorialBitan PramanikNo ratings yet
- Geese: A Traffic Generator: For Performance and Security Evaluation of IEC 61850 NetworksDocument6 pagesGeese: A Traffic Generator: For Performance and Security Evaluation of IEC 61850 NetworksAlemat TesfayNo ratings yet
- Vaps Ncom EstudieDocument6 pagesVaps Ncom EstudieHigor MaiaNo ratings yet
- 2015 - Authentication of MAV Communication Using Caesar Cipher CryptographyDocument6 pages2015 - Authentication of MAV Communication Using Caesar Cipher CryptographyHaris KhanNo ratings yet
- PARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingDocument3 pagesPARAM Shavak: High Performance Computing (HPC), Grid and Cloud ComputingarchikakatiyarNo ratings yet
- Lec 15-16Document33 pagesLec 15-16Salma SolimanNo ratings yet
- BedRock Systems Ebook - Developing With Formal MethodsDocument14 pagesBedRock Systems Ebook - Developing With Formal MethodsjtpaaschNo ratings yet
- An MPEG 2 Decoder Case Study As A DriverDocument5 pagesAn MPEG 2 Decoder Case Study As A DriverHariniNo ratings yet
- Network Automation and Abstraction Using Python PRDocument9 pagesNetwork Automation and Abstraction Using Python PRzeeshanec09No ratings yet
- Privacy Preserving On Mobile Health Data in CloudDocument46 pagesPrivacy Preserving On Mobile Health Data in CloudVinoth ChitraNo ratings yet
- Network Automation and Abstraction Using Python Programming MethodsDocument9 pagesNetwork Automation and Abstraction Using Python Programming MethodsLAngel ReyesNo ratings yet
- Suspicious EmailDocument44 pagesSuspicious EmailishitaNo ratings yet
- PISCES: A Programmable, Protocol-Independent Software SwitchDocument14 pagesPISCES: A Programmable, Protocol-Independent Software SwitchRaplinNo ratings yet
- The Case For Reflective MiddlewareDocument10 pagesThe Case For Reflective Middlewarepj4allNo ratings yet
- Bring Ip Verification Closer To SocDocument9 pagesBring Ip Verification Closer To SocpriyajeejoNo ratings yet
- 1.IOT Application For Real-Time Monitor of PLC Data Using EPICSDocument5 pages1.IOT Application For Real-Time Monitor of PLC Data Using EPICSMaria CamargoNo ratings yet
- Chandra ResumeDocument6 pagesChandra ResumeAnitha ReddyNo ratings yet
- Compiling Occam Into Field-Programmable Gate Arrays: Ian Page and Wayne LukDocument13 pagesCompiling Occam Into Field-Programmable Gate Arrays: Ian Page and Wayne LukTamiltamil TamilNo ratings yet
- Amanrakesh ResumeDocument3 pagesAmanrakesh ResumeAman SrivastavaNo ratings yet
- A Survey On Application Layer Protocols For The Internet of Things Transaction On IoT and Cloud ComputingDocument7 pagesA Survey On Application Layer Protocols For The Internet of Things Transaction On IoT and Cloud ComputingMaria GonzalezNo ratings yet
- Software Defined RadioDocument28 pagesSoftware Defined RadioClassic PrintersNo ratings yet
- Machine Vision Using LabviewDocument8 pagesMachine Vision Using LabviewLokesh DnNo ratings yet
- SR - Sofware Engineer/ManagerDocument4 pagesSR - Sofware Engineer/Managerapi-121383275No ratings yet
- Transfer of Advanced Asaac SW Technology Onto The Eurofighter/TyphoonDocument5 pagesTransfer of Advanced Asaac SW Technology Onto The Eurofighter/TyphoonQuân LêNo ratings yet
- Amanrakesh ResumeDocument3 pagesAmanrakesh ResumeAman SrivastavaNo ratings yet
- Implementing The CANopen Protocol in A Multiple Node System in The BioBike For Motor Position ControlDocument7 pagesImplementing The CANopen Protocol in A Multiple Node System in The BioBike For Motor Position ControlVedant PrustyNo ratings yet
- Service Proxy With Load Balancing and Autoscaling For A Distributed Virtualization SystemDocument10 pagesService Proxy With Load Balancing and Autoscaling For A Distributed Virtualization SystemPablo PessolaniNo ratings yet
- A Software Architecture For Zero-Copy RPC in Java: Chi-Chao Chang and Thorsten Von EickenDocument16 pagesA Software Architecture For Zero-Copy RPC in Java: Chi-Chao Chang and Thorsten Von EickenWilfredo FelixNo ratings yet
- ABSTRACTDocument16 pagesABSTRACTHorlars LeeNo ratings yet
- "Drawing" Cryptosystems With CAL: PracticalitiesDocument1 page"Drawing" Cryptosystems With CAL: PracticalitiesWajdi ElhamziNo ratings yet
- Naveen ResumeDocument4 pagesNaveen ResumenaveenNo ratings yet
- Systemverilog Based Verification Environment For Wishbone Interface of Ahb-Wishbone BridgeDocument4 pagesSystemverilog Based Verification Environment For Wishbone Interface of Ahb-Wishbone Bridgemeghna veggalamNo ratings yet
- Go Mac PapDocument5 pagesGo Mac Papsyedsalman1984No ratings yet
- Sowmya TK Senior Software Engineer: ObjectiveDocument4 pagesSowmya TK Senior Software Engineer: Objectivesowmya tkNo ratings yet
- Wapnil Hanadrakant OndeDocument3 pagesWapnil Hanadrakant OndeRashmi TalrejaNo ratings yet
- Model Based Distributed Testing of Object Oriented Programs: SciencedirectDocument8 pagesModel Based Distributed Testing of Object Oriented Programs: SciencedirectDendyNo ratings yet
- Compiler Technology For Future MicroprocessorsDocument52 pagesCompiler Technology For Future MicroprocessorsBiswajit DasNo ratings yet
- Flowstalker: Comprehensive Traffic Flow Monitoring On The Data Plane Using P4Document6 pagesFlowstalker: Comprehensive Traffic Flow Monitoring On The Data Plane Using P4Angel Nicolas Arotoma PraviaNo ratings yet
- Hardware-Software Debugging Techniques For Reconfigurable Systems-on-ChipDocument6 pagesHardware-Software Debugging Techniques For Reconfigurable Systems-on-Chipsankar SNo ratings yet
- J2EE Software EnvironmentDocument20 pagesJ2EE Software EnvironmentsureshNo ratings yet
- SDN: Management and Orchestration Considerations: White PaperDocument13 pagesSDN: Management and Orchestration Considerations: White PaperTaha AlhatmiNo ratings yet
- Travel Bill Tracking SystemDocument69 pagesTravel Bill Tracking SystemVKM201350% (2)
- Mastering Python Network Automation: Automating Container Orchestration, Configuration, and Networking with Terraform, Calico, HAProxy, and IstioFrom EverandMastering Python Network Automation: Automating Container Orchestration, Configuration, and Networking with Terraform, Calico, HAProxy, and IstioNo ratings yet
- AWP Assignments NptelDocument26 pagesAWP Assignments NptelkolisettyvsureshNo ratings yet
- Tutorial - Globe at Home R01 Full Admin Access. - Pinoy Internet and Technology ForumsDocument8 pagesTutorial - Globe at Home R01 Full Admin Access. - Pinoy Internet and Technology ForumsAlfred Jamelarin0% (1)
- Lecture #2 Fundamentals of Cellular CommunicationDocument5 pagesLecture #2 Fundamentals of Cellular CommunicationMrs. Vasanthi Muniasamy100% (1)
- Nokia Siemens Networks Flexi MR 10 BTS Datasheet 19022013Document5 pagesNokia Siemens Networks Flexi MR 10 BTS Datasheet 19022013Joao SilvaNo ratings yet
- NSC 2007Document5 pagesNSC 2007andhracollegesNo ratings yet
- Implementing Complex MP-BGP Over-Lapping VPNsDocument67 pagesImplementing Complex MP-BGP Over-Lapping VPNskasqureshiNo ratings yet
- Wifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual CarefullyDocument24 pagesWifi Smart: Thank You For Choosing Our Product. For Proper Operation, Please Read and Keep This Manual Carefullykari.junttilaNo ratings yet
- Music On Hold OverviewDocument36 pagesMusic On Hold OverviewgabeNo ratings yet
- Dap-1320 Manual 1.1 en PDFDocument72 pagesDap-1320 Manual 1.1 en PDFblezz2008No ratings yet
- Huawei Videoconferencing Recording and Streaming Engine RSE6500 DatasheetDocument2 pagesHuawei Videoconferencing Recording and Streaming Engine RSE6500 DatasheetAnonymous G1iPoNOKNo ratings yet
- Ceragon FibeAir 1500 - Operation and Installation ManualDocument137 pagesCeragon FibeAir 1500 - Operation and Installation ManualBrunoRFNo ratings yet
- Network Monitoring SystemDocument23 pagesNetwork Monitoring Systemjack_16No ratings yet
- Satellite NIM Tuner Module: Product RangeDocument2 pagesSatellite NIM Tuner Module: Product RangeHedenarol Ramirez RojasNo ratings yet
- Interoperable, Secure Group CommunicationDocument8 pagesInteroperable, Secure Group CommunicationraghavchNo ratings yet
- CCIE Security IGP, EGP AuthenticationDocument26 pagesCCIE Security IGP, EGP AuthenticationMd. Rashedul AlamNo ratings yet
- Panasonic KX ts3mxbDocument25 pagesPanasonic KX ts3mxbfahmy najibNo ratings yet
- 09 Huawei CloudEngine S6730-H Series Switches DatasheetDocument24 pages09 Huawei CloudEngine S6730-H Series Switches Datasheetjavier berengueNo ratings yet
- Multi Factor Authentication Whitepaper Arx - Intellect DesignDocument12 pagesMulti Factor Authentication Whitepaper Arx - Intellect DesignIntellect DesignNo ratings yet
- SkyEdge II ProDocument2 pagesSkyEdge II ProNo2MonkeyNo ratings yet
- Microstrip Patch Antenna (3.5 GHZ) : Ansari Fahad Bilal ZaheeruddinDocument5 pagesMicrostrip Patch Antenna (3.5 GHZ) : Ansari Fahad Bilal Zaheeruddinkadambari shindeNo ratings yet
- Lte Epc Ims Call FlowDocument17 pagesLte Epc Ims Call FlowSudip Bhowmik100% (1)
- 3.ZXMP M900Document70 pages3.ZXMP M900eyasu abebe adoNo ratings yet
- Leica GS15 BaseDocument7 pagesLeica GS15 Baseedusilva30No ratings yet
- Infinibad Cheat SheetDocument2 pagesInfinibad Cheat SheetSudhakar LakkarajuNo ratings yet
- Cisco Profinet-White-PaperDocument6 pagesCisco Profinet-White-Paperpatel_rajendraNo ratings yet
- Paradox 738 EX Programming GuideDocument12 pagesParadox 738 EX Programming GuideDan RaducanuNo ratings yet
- Dgca Module 13 July 17 1ST Session PDFDocument2 pagesDgca Module 13 July 17 1ST Session PDFa panda0% (1)
- NEC Topaz Quick Reference GuideDocument11 pagesNEC Topaz Quick Reference GuideAbdoukaderYassinNo ratings yet
- TEMS Discovery Device 11.1.2 Release Note PDFDocument18 pagesTEMS Discovery Device 11.1.2 Release Note PDFntphong0401@yahoo.com.vnNo ratings yet