Download as pptx, pdf, or txt
You might also like
- Chapter 6 Unit Test TrigDocument6 pagesChapter 6 Unit Test TrigAnanya Sharma - Lincoln Alexander SS (2132)No ratings yet
- Iso 8015 - 1985-12-15Document7 pagesIso 8015 - 1985-12-15Ionut FarcasNo ratings yet
- Quantum Theory of The Hydrogen AtomDocument72 pagesQuantum Theory of The Hydrogen AtomPallavi SinghNo ratings yet
- 2.1 Complex Maths and Laplace Transform ReviewDocument31 pages2.1 Complex Maths and Laplace Transform ReviewDawa PenjorNo ratings yet
- BS-VII MSc-IIIDocument64 pagesBS-VII MSc-IIIwajeehawisalNo ratings yet
- BS 3Document58 pagesBS 3abhishekNo ratings yet
- RemarksDocument2 pagesRemarksJosh ManNo ratings yet
- 316chem Chap 4Document62 pages316chem Chap 4jumana sayedNo ratings yet
- 785-Article Text-1542-1-10-20121201Document9 pages785-Article Text-1542-1-10-20121201Nina NisrinaNo ratings yet
- 22 Hydrogen AtomDocument37 pages22 Hydrogen AtomengshimaaNo ratings yet
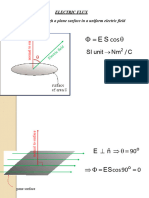
- ELECTRIC FLUX 1 Chapter1 04Document57 pagesELECTRIC FLUX 1 Chapter1 04Shubham TiwariNo ratings yet
- 4.1 Thick Cylinder and DisksDocument7 pages4.1 Thick Cylinder and DisksMohamad Amir HaziqNo ratings yet
- PPT6 (2) UpdatedDocument27 pagesPPT6 (2) UpdatedAdugnaw BiksNo ratings yet
- DR Sailaja U - PhysicsDocument78 pagesDR Sailaja U - PhysicsYocobSamandrewsNo ratings yet
- Angular Momentum and Linear Momentum - Circular Cylindrical CoordinatesDocument27 pagesAngular Momentum and Linear Momentum - Circular Cylindrical CoordinatesDaniel LeeNo ratings yet
- Assignment 2Document4 pagesAssignment 2Vemuri Lakshmi ganeshNo ratings yet
- MSO202 Lect 4Document18 pagesMSO202 Lect 4ab4azizNo ratings yet
- Central Potential: Another Important Problem in Quantum Mechanics Is The Central Potential ProblemDocument20 pagesCentral Potential: Another Important Problem in Quantum Mechanics Is The Central Potential Problemabdul rehmanNo ratings yet
- Chapter 4Document39 pagesChapter 4pcbmengNo ratings yet
- HW1Document1 pageHW1Can GümüşoğluNo ratings yet
- Lecture 13Document47 pagesLecture 13--No ratings yet
- Lecture 04Document13 pagesLecture 04sandrajychungNo ratings yet
- ), (X Cos L Cos L:), (Y Sin L Sin LDocument48 pages), (X Cos L Cos L:), (Y Sin L Sin Lعلي كامل الاسديNo ratings yet
- Chapter 1 - Basic Concepts: Atoms: Discovery of Atomic Structure Rutherford (1910)Document19 pagesChapter 1 - Basic Concepts: Atoms: Discovery of Atomic Structure Rutherford (1910)Anulisa DasNo ratings yet
- Polar CoordinatesDocument26 pagesPolar CoordinatesWASEEM_AKHTER50% (2)
- AtomicStrucure SlidesDocument17 pagesAtomicStrucure SlidessamebalutNo ratings yet
- Atomic Structure: CY 101-ChemistryDocument16 pagesAtomic Structure: CY 101-ChemistrypabitraNo ratings yet
- Lecture 02b 26092023 032729pmDocument6 pagesLecture 02b 26092023 032729pmvacedok521No ratings yet
- Smith ChartDocument28 pagesSmith ChartsniyaNo ratings yet
- JT 205:quantum Mechanics Assignement 3: Due: 16 of December 2021 Answer All QuestionsDocument3 pagesJT 205:quantum Mechanics Assignement 3: Due: 16 of December 2021 Answer All QuestionsMaitraNo ratings yet
- Nilsson DoctDocument27 pagesNilsson DoctranitaNo ratings yet
- Angular ConventionsDocument15 pagesAngular ConventionsAlexgriNo ratings yet
- Lecture 121111Document26 pagesLecture 121111--No ratings yet
- QM 5Document28 pagesQM 5nofec12886No ratings yet
- New EM8Document42 pagesNew EM8Gerson PNo ratings yet
- Lecture 5Document21 pagesLecture 5Yash RajNo ratings yet
- QMech HomeworkSolutionsDocument31 pagesQMech HomeworkSolutionsJimmy ShamsiNo ratings yet
- QMech HomeworkSolutions PDFDocument31 pagesQMech HomeworkSolutions PDFSankha100% (1)
- Creeping Flow Near A Rotating Sphere PDFDocument10 pagesCreeping Flow Near A Rotating Sphere PDFne gerek var anonimNo ratings yet
- QP6PPT 2015Document33 pagesQP6PPT 2015Johnny BraveNo ratings yet
- Polar Equations of ConicsDocument1 pagePolar Equations of Conicsthank highNo ratings yet
- Collective ModelDocument22 pagesCollective ModelYogendra MeenaNo ratings yet
- Equations of ElasticityDocument1 pageEquations of Elasticityjerome balanoyosNo ratings yet
- D G Kanhere, Center For Simulation and Modeling Pune UniversityDocument74 pagesD G Kanhere, Center For Simulation and Modeling Pune UniversitySelvakapoorNo ratings yet
- Rigid RotorDocument38 pagesRigid RotorSergeyNo ratings yet
- Physics 2B For Materials and Structural EngineeringDocument52 pagesPhysics 2B For Materials and Structural EngineeringAnonymous 9uu04elNo ratings yet
- Jcpoveda 04262010 PDFDocument17 pagesJcpoveda 04262010 PDFLuis Alfonso RuizNo ratings yet
- Orbital Elements of An Earth Satellite: Yoshihide KozaiDocument11 pagesOrbital Elements of An Earth Satellite: Yoshihide KozaiTom BradyNo ratings yet
- Chapter 5 Transmission LinesDocument33 pagesChapter 5 Transmission Lines123 georgeNo ratings yet
- Lecture 9 09 11 22Document32 pagesLecture 9 09 11 22Alkit SharmaNo ratings yet
- Chapter 2 Optical FiberDocument132 pagesChapter 2 Optical FiberAnnan_Faridi_517No ratings yet
- Geometrical Optics Lecture 8Document21 pagesGeometrical Optics Lecture 8Yu-Heng HuangNo ratings yet
- STiAP Self Assessment 3Document3 pagesSTiAP Self Assessment 3MorodirNo ratings yet
- HaseebthesisDocument8 pagesHaseebthesisMuhammad Xahoor KaluKhelNo ratings yet
- 31 - AntennasDocument45 pages31 - AntennasMuhammad Daniyal Ahmed BaigNo ratings yet
- Imaging Basics 6Document4 pagesImaging Basics 6rajasekhar617No ratings yet
- Radial and Angular Parts of Atomic OrbitalsDocument7 pagesRadial and Angular Parts of Atomic OrbitalsArchisman MisraNo ratings yet
- Lineas de Transmision PropagacionDocument30 pagesLineas de Transmision PropagacionAlexis PatricioNo ratings yet
- Lecture Notes 4MeanVarianceDocument44 pagesLecture Notes 4MeanVarianceJust some stuffNo ratings yet
- Radiation From Half Wave DipoleDocument22 pagesRadiation From Half Wave Dipolebchaitanya55No ratings yet
- MO Lecture Course-2 PDFDocument20 pagesMO Lecture Course-2 PDFaneeshssaNo ratings yet
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101From EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101No ratings yet
- Characterization of Single ParticleDocument29 pagesCharacterization of Single ParticlePiyush RajNo ratings yet
- Floor LoadDocument9 pagesFloor LoadAbhijit RanjanNo ratings yet
- Mtech. Finite Element AnalysisDocument11 pagesMtech. Finite Element Analysissimalaravi100% (2)
- Different Types of Polygons - Simple Convex - Simple Concave - Non-Simple: Self-Intersecting - With HolesDocument38 pagesDifferent Types of Polygons - Simple Convex - Simple Concave - Non-Simple: Self-Intersecting - With HolesthirumalaikumaranNo ratings yet
- Iso 1925 2001 Balancing VocabularyDocument33 pagesIso 1925 2001 Balancing VocabularyAka ShriNo ratings yet
- Sec 4 E Maths SA2 2018 CHIJ ST NicholasDocument59 pagesSec 4 E Maths SA2 2018 CHIJ ST NicholasSriram trashyouNo ratings yet
- MATH 7 Q3 Week 2 RBI:EditedDocument7 pagesMATH 7 Q3 Week 2 RBI:Editednylxyxzy0411 albNo ratings yet
- Booklet FINAL PARABOLA PDFDocument49 pagesBooklet FINAL PARABOLA PDFDhruv ModiNo ratings yet
- Arc Addition Postulate Segment of Circle Arc LengthDocument15 pagesArc Addition Postulate Segment of Circle Arc LengthLerio CostinNo ratings yet
- Math4 Q3M9 Differentiating Perimeter From Area RDAggalotDocument25 pagesMath4 Q3M9 Differentiating Perimeter From Area RDAggalotCleanne FloresNo ratings yet
- Lecture 6 Notes, Electromagnetic Theory I: 1. Associated Legendre PolynomialsDocument14 pagesLecture 6 Notes, Electromagnetic Theory I: 1. Associated Legendre PolynomialsMuzamil ShahNo ratings yet
- Quarter 3, Week 2: Mathematics 7 Activity SheetDocument4 pagesQuarter 3, Week 2: Mathematics 7 Activity SheetMariel Pastolero100% (1)
- (2008 2009) Mathematical Reflections The Next Two Years TocDocument3 pages(2008 2009) Mathematical Reflections The Next Two Years Tocd9916220% (1)
- 3na Pythagoras Theorem 1Document5 pages3na Pythagoras Theorem 1John GohNo ratings yet
- Scholastic Math Grde 3Document66 pagesScholastic Math Grde 3mouna100% (1)
- Chapter 12 - SI - Final SolutionsDocument10 pagesChapter 12 - SI - Final SolutionsDouglas FernandesNo ratings yet
- Section: A Consists of 20 Questions of I Mark EachDocument8 pagesSection: A Consists of 20 Questions of I Mark EachS.N. SwamiNo ratings yet
- Chapter Three Term Weighting and Similarity MeasuresDocument33 pagesChapter Three Term Weighting and Similarity MeasuresAlemayehu GetachewNo ratings yet
- General Kinetics of RotationDocument9 pagesGeneral Kinetics of Rotationdenver costalesNo ratings yet
- Euler Line ConstructionDocument3 pagesEuler Line Constructionneiljain421100% (1)
- Plane Survey Notes 2021Document92 pagesPlane Survey Notes 2021Mike mikeNo ratings yet
- Chapter 05Document26 pagesChapter 05Syed Faraz100% (1)
- Dynamics of Rigid Bodies: Kinematics Vs KineticsDocument2 pagesDynamics of Rigid Bodies: Kinematics Vs KineticsEd Adrian Navarro ParanganNo ratings yet
- Properties of Equality and Postulate: Lesson 2Document21 pagesProperties of Equality and Postulate: Lesson 2Kyle Cada IINo ratings yet
- FORMULA MF10 Further MathematicsDocument8 pagesFORMULA MF10 Further MathematicsRichie TangNo ratings yet
- JAMB Mathematics Past Questions - CLASSROOMDocument60 pagesJAMB Mathematics Past Questions - CLASSROOMAnofi YussufNo ratings yet
- MATH2Document5 pagesMATH2DayLe Ferrer Abapo100% (2)
- Group (Mathematics) : The Manipulations of This Rubik's Cube Form The Rubik's Cube GroupDocument20 pagesGroup (Mathematics) : The Manipulations of This Rubik's Cube Form The Rubik's Cube GroupsgxrgsysNo ratings yet