Download as ppt, pdf, or txt
You might also like
- ME2142E Feedback Control Systems-CheatsheetDocument2 pagesME2142E Feedback Control Systems-CheatsheetPhyo Wai Aung67% (9)
- Lindgren, Georg - Rootzen, Holger - Sandsten, Maria - Stationary Stochastic Processes For Scientists and Engineers-CRC Press (2013)Document316 pagesLindgren, Georg - Rootzen, Holger - Sandsten, Maria - Stationary Stochastic Processes For Scientists and Engineers-CRC Press (2013)AnastasijaNo ratings yet
- Forecasting PDFDocument101 pagesForecasting PDFandresacastroNo ratings yet
- 1997 (Jack Johnston, John Dinardo) Econometric Methods PDFDocument514 pages1997 (Jack Johnston, John Dinardo) Econometric Methods PDFtitan10084% (19)
- Regression in MarketingDocument90 pagesRegression in Marketingmesay83No ratings yet
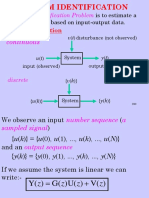
- Continuous: System Identification ProblemDocument41 pagesContinuous: System Identification Problemboulainine houriaNo ratings yet
- TVTIx Chapter3 EACT631 AdaptiveControl1Document45 pagesTVTIx Chapter3 EACT631 AdaptiveControl1abata yohannesNo ratings yet
- EE5103/ME5403 Lecture Six Predictive Control: Solution To Tracking ProblemDocument44 pagesEE5103/ME5403 Lecture Six Predictive Control: Solution To Tracking ProblemFeiNo ratings yet
- Formulas FractionalDocument20 pagesFormulas FractionalShivamNo ratings yet
- Chap53 ARMADocument19 pagesChap53 ARMAGeneral MasterNo ratings yet
- Assignment 1: 1. Example SectionDocument3 pagesAssignment 1: 1. Example SectionYonas D. EbrenNo ratings yet
- J. Hetthéssy, A. Barta, R. Bars: DeadDocument5 pagesJ. Hetthéssy, A. Barta, R. Bars: DeadArulrajNo ratings yet
- Identification of Linear SystemsDocument21 pagesIdentification of Linear Systemsanon_11806628No ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- 4-Simple Banget Linear RegressionnDocument8 pages4-Simple Banget Linear RegressionnWiga Maulana BaihaqiNo ratings yet
- 446-08 Block Diagrams (N) - HandoutDocument7 pages446-08 Block Diagrams (N) - HandoutFrancisco HurtadoNo ratings yet
- Formulas For Control System Design: State SpaceDocument3 pagesFormulas For Control System Design: State SpacehanythekingNo ratings yet
- Web Practice Exam 1Document11 pagesWeb Practice Exam 1Gnanaraj100% (1)
- State Space Analysis: Common Data For Questions 3 & 4Document6 pagesState Space Analysis: Common Data For Questions 3 & 4Amey TaruNo ratings yet
- Fionaw Linear Algebra Math 232Document4 pagesFionaw Linear Algebra Math 232Kimondo KingNo ratings yet
- Lab 3Document6 pagesLab 3talal pervaizNo ratings yet
- Yt Yt Ut Ut: Adaptive Control Homework 05 Pole-Placement Design and Indirect STRDocument2 pagesYt Yt Ut Ut: Adaptive Control Homework 05 Pole-Placement Design and Indirect STRlaw0516No ratings yet
- Construction Protocol of Circle Area and Circumference in GeogebraDocument3 pagesConstruction Protocol of Circle Area and Circumference in GeogebraJanak Singh KarkiNo ratings yet
- Laplace TransformDocument68 pagesLaplace TransformNishat Jahan TarannumNo ratings yet
- Extensions Beyond Linear Regression: Topics in Data ScienceDocument66 pagesExtensions Beyond Linear Regression: Topics in Data ScienceKadirNo ratings yet
- NonlinearAdaptiveCtrl Final Exam 1st Semester 1920 SolutionDocument5 pagesNonlinearAdaptiveCtrl Final Exam 1st Semester 1920 SolutionVương Phước HoàngNo ratings yet
- Handling Non-Convexities: Entrepreneurship and Financial FrictionsDocument5 pagesHandling Non-Convexities: Entrepreneurship and Financial FrictionsSaptarshi MukherjeeNo ratings yet
- Soliton RefDocument13 pagesSoliton RefasharspillaiNo ratings yet
- Exfall2021 With SolutionsDocument8 pagesExfall2021 With SolutionsJulius DesertusNo ratings yet
- Numerical Analysis: Solving Systems of Linear EquationsDocument10 pagesNumerical Analysis: Solving Systems of Linear EquationsSarbesh ChaudharyNo ratings yet
- Cheat Sheet Fionaw - Linear Algebra Math 232Document4 pagesCheat Sheet Fionaw - Linear Algebra Math 232SATHE SNo ratings yet
- EEE3094S Exam Nov 2018Document5 pagesEEE3094S Exam Nov 2018Stalin KosterNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Model Based Spectral AnalysisDocument26 pagesModel Based Spectral AnalysisSathish Narayana RaoNo ratings yet
- 7 I LB 2 V VL I1 YYl SYBXSTIDocument23 pages7 I LB 2 V VL I1 YYl SYBXSTIGingka HaganeNo ratings yet
- Generalised Minimum Variance ControllerDocument32 pagesGeneralised Minimum Variance Controllerenzo velasquezNo ratings yet
- Lecture 7 & 8 (Stability Analysis)Document35 pagesLecture 7 & 8 (Stability Analysis)muhammad hamzaNo ratings yet
- Recursive Least Squares Algorithm For Nonlinear Dual-Rate Systems Using Missing-Output Estimation ModelDocument20 pagesRecursive Least Squares Algorithm For Nonlinear Dual-Rate Systems Using Missing-Output Estimation ModelTín Trần TrungNo ratings yet
- Stat 565: Some Basic Time Series ModelsDocument34 pagesStat 565: Some Basic Time Series Modelsmasudul9islamNo ratings yet
- 30 580ln Fa08 PDFDocument14 pages30 580ln Fa08 PDFPedroNo ratings yet
- Tables For Cas Exam Mas-IiDocument18 pagesTables For Cas Exam Mas-IiPhat LocNo ratings yet
- Testing Residuals For White Noise in Time SeriesDocument16 pagesTesting Residuals For White Noise in Time Seriesali_alfaNo ratings yet
- LPVcourse PDFDocument73 pagesLPVcourse PDFYaye RodriguezNo ratings yet
- S - S Final Paper 1Document3 pagesS - S Final Paper 1SumitNo ratings yet
- Digital Control SystemsDocument8 pagesDigital Control SystemsBebo DiaNo ratings yet
- Block Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellDocument19 pagesBlock Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellAnn RazonNo ratings yet
- Digital Signal Processing LabDocument6 pagesDigital Signal Processing LabrahehaqguestsNo ratings yet
- Experiment Lab Report 4Document15 pagesExperiment Lab Report 4Mushfiqul HoqueNo ratings yet
- EEE354 Assignment Answer SchemeDocument7 pagesEEE354 Assignment Answer SchemeIzzat AzmanNo ratings yet
- Review 1Document13 pagesReview 1QwilleranNo ratings yet
- GATE-Electronics & Comm (ECE) - 2008Document29 pagesGATE-Electronics & Comm (ECE) - 2008Shirshendu PanditNo ratings yet
- 06 ARMA PropertiesDocument34 pages06 ARMA PropertiesLucía AndreozziNo ratings yet
- Matlab Code BasicsDocument4 pagesMatlab Code BasicsDheeraj SharmaNo ratings yet
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- #QF604 MCQ Practice Test 5Document4 pages#QF604 MCQ Practice Test 5johnnylou592No ratings yet
- Lab 4Document15 pagesLab 4Aliqpsk AlasadyNo ratings yet
- Elec9731 LM2Document44 pagesElec9731 LM2wyx840927627No ratings yet
- Digital Signal Processing Systems, Basic Filtering Types, and Digital Filter RealizationsDocument21 pagesDigital Signal Processing Systems, Basic Filtering Types, and Digital Filter RealizationsmelkiNo ratings yet
- Chap 8Document39 pagesChap 8balkyderNo ratings yet
- Lecture 1Document3 pagesLecture 1حسن عارف شمس اللهNo ratings yet
- 17 MSE280 Assignment 1Document4 pages17 MSE280 Assignment 1ishaan28No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Semiconductor Manufacturing Technology: OxidationDocument50 pagesSemiconductor Manufacturing Technology: Oxidationboulainine houriaNo ratings yet
- Semiconductor Manufacturing Technology: OxidationDocument50 pagesSemiconductor Manufacturing Technology: Oxidationboulainine houriaNo ratings yet
- Finite Impulse Response FiltersDocument24 pagesFinite Impulse Response Filtersboulainine houriaNo ratings yet
- Continuous: System Identification ProblemDocument41 pagesContinuous: System Identification Problemboulainine houriaNo ratings yet
- Digital Signal Processing: Electrical Engineering Department Iran University of Science & TechDocument40 pagesDigital Signal Processing: Electrical Engineering Department Iran University of Science & Techboulainine houriaNo ratings yet
- DTFT PropertiesDocument53 pagesDTFT Propertiesboulainine houriaNo ratings yet
- Lecture 3: March 6, 2007: TopicDocument37 pagesLecture 3: March 6, 2007: Topicboulainine houriaNo ratings yet
- Basic IIR Digital Filter StructuresDocument69 pagesBasic IIR Digital Filter Structuresboulainine houriaNo ratings yet
- Chap6-Digital Filter StructuresDocument11 pagesChap6-Digital Filter Structuresboulainine houriaNo ratings yet
- ADSP Lectures CoditoDocument107 pagesADSP Lectures CoditoArun Balajee VasudevanNo ratings yet
- Afmtools PDFDocument28 pagesAfmtools PDFRizki MaulanaNo ratings yet
- Data Analytics - Object Segmentation UNIT-IVDocument33 pagesData Analytics - Object Segmentation UNIT-IV19524 AlekhyaNo ratings yet
- Hevia ARMA EstimationDocument6 pagesHevia ARMA EstimationAnthanksNo ratings yet
- 3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Document5 pages3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Ana ScaletNo ratings yet
- Caballero Et Al., 2002Document14 pagesCaballero Et Al., 2002Sara Maria Rincon BogotaNo ratings yet
- (Anas+Osho+Umar) Food Price InflationDocument13 pages(Anas+Osho+Umar) Food Price InflationAnas IbrahimNo ratings yet
- ARIMA Model Selection in Matlab: Radek Hřebík, Jana SekničkováDocument6 pagesARIMA Model Selection in Matlab: Radek Hřebík, Jana SekničkováR.A.MNo ratings yet
- ARIMA Models For Bus Travel Time PredictionDocument11 pagesARIMA Models For Bus Travel Time Predictioncristian_masterNo ratings yet
- Hurricane Prediction ReportDocument12 pagesHurricane Prediction Reportapi-202492975No ratings yet
- ARIMA Models in Python Chapter1Document38 pagesARIMA Models in Python Chapter1FgpeqwNo ratings yet
- Pawlus 2013 InvestigationDocument29 pagesPawlus 2013 InvestigationMomo PierreNo ratings yet
- GMM and OLS Estimation and Inference For New Keynesian Phillips CurveDocument26 pagesGMM and OLS Estimation and Inference For New Keynesian Phillips CurveQuang Kien TaNo ratings yet
- The Box-Jenkins Methodology For RIMA ModelsDocument180 pagesThe Box-Jenkins Methodology For RIMA ModelsAdil Bin KhalidNo ratings yet
- AR Z-Transform PDFDocument48 pagesAR Z-Transform PDFshereenkhan1200% (1)
- Package Earlywarnings': R Topics DocumentedDocument16 pagesPackage Earlywarnings': R Topics Documentedjohan oldmanNo ratings yet
- ATM Cash Prediction Using Time Series ApproachDocument7 pagesATM Cash Prediction Using Time Series ApproachDanielNo ratings yet
- Further Questions For EC306 Sam Astill and Alex Karalis IsaacDocument5 pagesFurther Questions For EC306 Sam Astill and Alex Karalis Isaachectorgm77No ratings yet
- Forecasting Exchange Rates Using Time Series Analysis: The Sample of The Currency of KazakhstanDocument8 pagesForecasting Exchange Rates Using Time Series Analysis: The Sample of The Currency of Kazakhstantheo leburuNo ratings yet
- Homework 2 Solutions: Joe Neeman September 22, 2010Document8 pagesHomework 2 Solutions: Joe Neeman September 22, 2010ShuX13No ratings yet
- The Use of Triple Exponential Smoothing MethodDocument5 pagesThe Use of Triple Exponential Smoothing MethodRenjun GanNo ratings yet
- Stationarity, Cointegration: Arnaud Chevalier University College Dublin January 2004Document52 pagesStationarity, Cointegration: Arnaud Chevalier University College Dublin January 2004Josh2002No ratings yet
- Koyck - Polynomial DL (PDL) : - A Form of Short-Term Model - Explanatory Variables - Three ComponentsDocument5 pagesKoyck - Polynomial DL (PDL) : - A Form of Short-Term Model - Explanatory Variables - Three ComponentsmazamniaziNo ratings yet
- Backtesting in Excel - Help CenterDocument11 pagesBacktesting in Excel - Help CenterKiongboh AngNo ratings yet
- Modul 6. ARIMA Box-Jenkins Part 2Document21 pagesModul 6. ARIMA Box-Jenkins Part 2Muhammad Arief FatkhurrahmanNo ratings yet
- A Parametric Feature Extraction and Classification Strategy For Brain-Computer InterfacingDocument6 pagesA Parametric Feature Extraction and Classification Strategy For Brain-Computer InterfacingAngel Omar Martinez MataNo ratings yet