Download as ppt, pdf, or txt
You might also like
- DC Motor Speed ControlDocument54 pagesDC Motor Speed ControlAbhishek Gupta100% (3)
- VFD BasicsDocument9 pagesVFD BasicsDinesh KumaraNo ratings yet
- Three Phase Induction Motor Using Single PhaseDocument8 pagesThree Phase Induction Motor Using Single PhasehezugNo ratings yet
- VD SeriesDocument4 pagesVD SeriesintrudentalertNo ratings yet
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- Presented By: Bheemanna Angadi (1OX13EE020) The Oxford College of Engg-BangaloreDocument17 pagesPresented By: Bheemanna Angadi (1OX13EE020) The Oxford College of Engg-BangaloreRashed AlbarakehNo ratings yet
- An-9019 Motor Drive System Using SPM InverterDocument25 pagesAn-9019 Motor Drive System Using SPM InverterasokanenNo ratings yet
- Unit-IV SSD PDFDocument22 pagesUnit-IV SSD PDFRam SankarNo ratings yet
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocument4 pagesDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoNo ratings yet
- Technology Template 16x9Document22 pagesTechnology Template 16x9Dare DevilNo ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- Working Principle of Variable Frequency Drive (VFD)Document4 pagesWorking Principle of Variable Frequency Drive (VFD)Thandayudhapani VeeraputhiranNo ratings yet
- Technical Seminar On VFDDocument17 pagesTechnical Seminar On VFDRadhika Priyadarshini100% (7)
- 2 Lva1 App6891Document13 pages2 Lva1 App6891gouravNo ratings yet
- The Voltech Handbook of PWM Motor DrivesDocument53 pagesThe Voltech Handbook of PWM Motor DrivesPovaS100% (1)
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Working Principleof Variable Frequency DriveDocument4 pagesWorking Principleof Variable Frequency DriveOsama Salem100% (1)
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- Variable Frequency Drives in A Power Plant: SynopsisDocument22 pagesVariable Frequency Drives in A Power Plant: SynopsisReuben VargheseNo ratings yet
- Component and Types of VFDDocument11 pagesComponent and Types of VFDArsalan Danish100% (1)
- VFD Types: Igbts ThyristorsDocument8 pagesVFD Types: Igbts ThyristorsAshok MoreNo ratings yet
- Igbt DC DriverDocument5 pagesIgbt DC Driverjimy_312No ratings yet
- AC Drive Theory and Application: Benefits of Using AC DrivesDocument8 pagesAC Drive Theory and Application: Benefits of Using AC DrivesRaghu KodiNo ratings yet
- Variable Frequency Drive or VFDDocument4 pagesVariable Frequency Drive or VFDramsingh2613No ratings yet
- Understanding Variable Speed Drives (Part 1)Document4 pagesUnderstanding Variable Speed Drives (Part 1)geav25653855No ratings yet
- v42 63Document5 pagesv42 63Bala KumarNo ratings yet
- Calculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorDocument18 pagesCalculation of Modulation Index of PWM Wave Form Feed To Inverter Feed Induction MotorSathishkumar MalipeddiNo ratings yet
- Chapter-1: Vissj Govt Polytechnic BhadravathiDocument22 pagesChapter-1: Vissj Govt Polytechnic Bhadravathipacha_569800No ratings yet
- What Is Frequency Inverter?Document3 pagesWhat Is Frequency Inverter?Dražen ĐukićNo ratings yet
- VFD Commissioning DeptDocument63 pagesVFD Commissioning DeptSam100% (2)
- Speed Control of DC Motor Using ChopperDocument7 pagesSpeed Control of DC Motor Using ChopperKoustav DasguptaNo ratings yet
- Purpose of Variable Frequency DrivesDocument25 pagesPurpose of Variable Frequency DrivesGaurav MobarNo ratings yet
- InverterDocument26 pagesInverteravijeet2828No ratings yet
- Infant Monitoring System Using Co2 Sensor-Project ReportDocument59 pagesInfant Monitoring System Using Co2 Sensor-Project ReportRajesh Kumar0% (1)
- Report On VFD For HT MotorDocument8 pagesReport On VFD For HT MotorDILEEPNo ratings yet
- Electic MotorsDocument22 pagesElectic MotorsAshutosh ShuklaNo ratings yet
- VFD Theory and CommissioningDocument44 pagesVFD Theory and Commissioningengkos koswaraNo ratings yet
- A New Topology For Unipolar Brushless DC Motor DriveDocument55 pagesA New Topology For Unipolar Brushless DC Motor Drivesrikaanth06No ratings yet
- Research To Study Variable Frequency Drive and Its Energy SavingsDocument4 pagesResearch To Study Variable Frequency Drive and Its Energy SavingsIjsrnet EditorialNo ratings yet
- Current Source InvertersDocument3 pagesCurrent Source InvertersgghussainNo ratings yet
- Lecture 6Document31 pagesLecture 6amanuel abrehaNo ratings yet
- Speed Control of DC MotorsDocument27 pagesSpeed Control of DC MotorsBabuKannanNo ratings yet
- Regarding Selection - WORD 97 FORMATDocument22 pagesRegarding Selection - WORD 97 FORMATSurya Prakash SinhaNo ratings yet
- Compressor Types, ClassificationDocument12 pagesCompressor Types, ClassificationNagaraj SubbiahNo ratings yet
- Synchronous Motor Drives: Open Loop V/F Control of Synchronous MotorDocument11 pagesSynchronous Motor Drives: Open Loop V/F Control of Synchronous MotorSaish Dalvi100% (1)
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Simulation Current Controlled: Converter-InverterDocument5 pagesSimulation Current Controlled: Converter-InverterVivek VickyNo ratings yet
- P. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDocument6 pagesP. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDivya ShriNo ratings yet
- Variable Frequency Drive: Seminar ReportDocument7 pagesVariable Frequency Drive: Seminar ReportPavan KamatNo ratings yet
- VFD 1Document17 pagesVFD 1Sujatha GoliNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDocument4 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterNirmalaNeeruNo ratings yet
- Variable Frequency Drives: Presented By: Rajarshi Ghose Dastidar. ROLL: 149. REGD. NO: 070906360Document54 pagesVariable Frequency Drives: Presented By: Rajarshi Ghose Dastidar. ROLL: 149. REGD. NO: 070906360Rajarshi Ghose Dastidar100% (2)
- Modern VVVF DrivesDocument5 pagesModern VVVF DrivesJohn BackmanNo ratings yet
- Power Efficient Motor Driver - VFD: Durgesh ChoudharyDocument4 pagesPower Efficient Motor Driver - VFD: Durgesh ChoudharyerpublicationNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Electrical Engineering Portal - Com Demand Factor Diversity Factor Utilization Factor Load FactorDocument12 pagesElectrical Engineering Portal - Com Demand Factor Diversity Factor Utilization Factor Load FactorBijay AgrawalNo ratings yet
- PAT Cycle-II - Target and Way ForwardDocument9 pagesPAT Cycle-II - Target and Way ForwardBijay AgrawalNo ratings yet
- Tools For Managing RiskDocument21 pagesTools For Managing RiskBijay AgrawalNo ratings yet
- Strategic Management & PolicyDocument13 pagesStrategic Management & PolicyBrian BoydNo ratings yet
- Project PlanningDocument16 pagesProject PlanningBijay AgrawalNo ratings yet
- STRATEGYDocument20 pagesSTRATEGYBijay AgrawalNo ratings yet
- Risk Handling StrategiesDocument18 pagesRisk Handling StrategiesBijay AgrawalNo ratings yet
- Risk Analysis and AssessmentDocument12 pagesRisk Analysis and AssessmentBijay AgrawalNo ratings yet
- Scope of ComprehensiveDocument12 pagesScope of ComprehensiveBijay AgrawalNo ratings yet
- Home Next: ConfidentialDocument14 pagesHome Next: ConfidentialBijay AgrawalNo ratings yet
- Competence Training Awareness of EmployeesDocument3 pagesCompetence Training Awareness of EmployeesBijay AgrawalNo ratings yet
- The Time Value of MoneyDocument5 pagesThe Time Value of MoneyBijay AgrawalNo ratings yet
- HR Focus QuestionnaireDocument2 pagesHR Focus QuestionnaireBijay AgrawalNo ratings yet
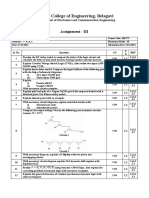
- Assignment III VLSIDocument2 pagesAssignment III VLSIAkshaykumar PatilNo ratings yet
- Lec-10 - Stuck at Fault DetectionDocument8 pagesLec-10 - Stuck at Fault Detectionabuzar raoNo ratings yet
- Technology in Education Technology Presentation in Blue Peach Illustrative StyleDocument37 pagesTechnology in Education Technology Presentation in Blue Peach Illustrative StyleAngel “Miley” SamileyNo ratings yet
- MB Manual Ga-B250m-Gaming5 eDocument44 pagesMB Manual Ga-B250m-Gaming5 eJuan Alcaraz SchinellaNo ratings yet
- Flying-Capacitor Based Hybrid LLC Converters With Input Voltage Auto-Balance Ability For High Voltage ApplicationsDocument11 pagesFlying-Capacitor Based Hybrid LLC Converters With Input Voltage Auto-Balance Ability For High Voltage ApplicationsBook4AllNo ratings yet
- NVIDIA Jetson Xavier NX System-on-Module: Volta GPU + Carmel ARM + 8 GB LPDDR4x + 16 GB eMMC 5.1Document39 pagesNVIDIA Jetson Xavier NX System-on-Module: Volta GPU + Carmel ARM + 8 GB LPDDR4x + 16 GB eMMC 5.1Vuk AntonicNo ratings yet
- Madrasah Tsanawiyah Miftahul Huda Majalengka Status Terakreditasi ADocument5 pagesMadrasah Tsanawiyah Miftahul Huda Majalengka Status Terakreditasi Aaziz ilmanudinNo ratings yet
- M&M 3Document20 pagesM&M 3sonu sabooNo ratings yet
- 25 KW Fast EV DC Charger Power StageDocument13 pages25 KW Fast EV DC Charger Power StageFarhanNo ratings yet
- LPD8 Editor User Guide: To Download and Install The Editor SoftwareDocument2 pagesLPD8 Editor User Guide: To Download and Install The Editor SoftwareNicola Dal saccoNo ratings yet
- Comparativo TransistoresDocument7 pagesComparativo TransistoresGustavo SanchezNo ratings yet
- MAX4208/MAX4209 Ultra-Low Offset/Drift, Precision Instrumentation Amplifiers With REF BufferDocument17 pagesMAX4208/MAX4209 Ultra-Low Offset/Drift, Precision Instrumentation Amplifiers With REF BufferAlfonso BlancoNo ratings yet
- Sequential Logic Design Practices: 5.1 Sequential Circuit Documentation StandardsDocument12 pagesSequential Logic Design Practices: 5.1 Sequential Circuit Documentation StandardsDipak NandeshwarNo ratings yet
- Brochure Wireless - 2020Document28 pagesBrochure Wireless - 2020MFNo ratings yet
- Idirect Evolution X1 Spec Sheet 102017Document1 pageIdirect Evolution X1 Spec Sheet 102017francescoli80No ratings yet
- 5.2.1.7 Vannessa Galindo - Examine The ARP TableDocument6 pages5.2.1.7 Vannessa Galindo - Examine The ARP TableVannessa Nataly Galindo RoaNo ratings yet
- Configuring A Raspberry Pi As An Intellivision Retro Gaming Console - Retronic DesignRetronic DesignDocument8 pagesConfiguring A Raspberry Pi As An Intellivision Retro Gaming Console - Retronic DesignRetronic Designlhsacchi6625No ratings yet
- Quick Guide - Testing / Commissioing: CPS IncDocument34 pagesQuick Guide - Testing / Commissioing: CPS IncFadi MuhamedNo ratings yet
- The OSI Model and The TCP/IP Protocol Suite: ExercisesDocument3 pagesThe OSI Model and The TCP/IP Protocol Suite: ExercisesManish Paliwal100% (1)
- Infineon Bts50055 1tma Ds v01 00 enDocument18 pagesInfineon Bts50055 1tma Ds v01 00 enCarlos Andres Garzon VargasNo ratings yet
- Black Stm32F4Vet6 Jtag and TFT: Board Pinouts PA0 Pin0Document1 pageBlack Stm32F4Vet6 Jtag and TFT: Board Pinouts PA0 Pin0jose mauricio velandia ramirez50% (2)
- Data Sheet: 74HC/HCT165Document10 pagesData Sheet: 74HC/HCT165Thế TùngNo ratings yet
- RRV4-65D-R6 Product SpecificationDocument5 pagesRRV4-65D-R6 Product SpecificationJhon EdissonNo ratings yet
- Lab1 111 PDFDocument16 pagesLab1 111 PDFGoran MiljkovicNo ratings yet
- EE230 Analog Lab 2Document4 pagesEE230 Analog Lab 2AnnirudhNo ratings yet
- S9S12HA32CLLDocument1 pageS9S12HA32CLLAutotronica CaxNo ratings yet
- Basic Electronics Quiz Questions (Even Sem)Document14 pagesBasic Electronics Quiz Questions (Even Sem)Asis PattanaikNo ratings yet
- Fiden Tial: Device SpecificationDocument1,011 pagesFiden Tial: Device Specificationolger huancara gasparaNo ratings yet
- EWCM 8900/9100/9900 Compressor Rack Controllers 13/18 DIN Installation GuideDocument2 pagesEWCM 8900/9100/9900 Compressor Rack Controllers 13/18 DIN Installation GuideDavid SanchezNo ratings yet
- Microwave DesignDocument121 pagesMicrowave DesignCj Llemos100% (1)