Download as pptx, pdf, or txt
You might also like
- A Practical Guide For Detecting Single-Phasing On A Three-Phase Power SystemDocument55 pagesA Practical Guide For Detecting Single-Phasing On A Three-Phase Power SystemGunadevan ChandrasekaranNo ratings yet
- 3.mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 pages3.mathematical Modeling of Mechanical Systems and Electrical SystemsMikiNo ratings yet
- EIS BoukampDocument97 pagesEIS BoukampMiraldaNo ratings yet
- 26 05 10 Electrical Testing QA QCDocument3 pages26 05 10 Electrical Testing QA QCTuong Nguyen Duc MinhNo ratings yet
- 3-Lecture 03 Translational Mechanical System3-SDocument23 pages3-Lecture 03 Translational Mechanical System3-SHamza KhanNo ratings yet
- Lecture 03 Translational Mechanical SystemsDocument23 pagesLecture 03 Translational Mechanical SystemsShehroze TalatNo ratings yet
- School of Electrical Engineering and Computer Science Department of Electrical EngineeringDocument24 pagesSchool of Electrical Engineering and Computer Science Department of Electrical EngineeringAbdur RafayNo ratings yet
- Modelling of Mechanical Systems - Control Systems - VIT VelloreDocument30 pagesModelling of Mechanical Systems - Control Systems - VIT VelloreHershita SahaNo ratings yet
- Control Systems Engineering: Modeling in The Frequency DomainDocument138 pagesControl Systems Engineering: Modeling in The Frequency Domainghulam mustafaNo ratings yet
- FALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IDocument14 pagesFALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IRupam KunduNo ratings yet
- Mechanical Systems: Translational RotationalDocument30 pagesMechanical Systems: Translational RotationalHussainNo ratings yet
- Control SystemsDocument105 pagesControl SystemsVenkatesan Satheeswaran100% (1)
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- Notes 3 Translational Mechanical System Transfer FunctionDocument13 pagesNotes 3 Translational Mechanical System Transfer FunctionApek Suasana50% (2)
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- W4 - Translational Mechanical System Transfer FunctionDocument15 pagesW4 - Translational Mechanical System Transfer FunctionMamoon KhanNo ratings yet
- Clo1-Mathematical Modelling - Translational Mechanical SystemDocument38 pagesClo1-Mathematical Modelling - Translational Mechanical SystemKasri AzizNo ratings yet
- Lec07 PDFDocument13 pagesLec07 PDFNasrullah YusupNo ratings yet
- Lecture 7 SsDocument17 pagesLecture 7 Ssyab AbateNo ratings yet
- Mechatronics Unit-6Document12 pagesMechatronics Unit-6nagsanthosh3No ratings yet
- 3 Mathematical Models of SystemsDocument35 pages3 Mathematical Models of SystemsDawa PenjorNo ratings yet
- Mathematical ModelDocument18 pagesMathematical Modelardius ebenezerNo ratings yet
- Chapter 5 - State Space RepresentationDocument37 pagesChapter 5 - State Space Representationvenosyah devanNo ratings yet
- Mathematical ModelDocument54 pagesMathematical ModelLEMANG GAMINGNo ratings yet
- Unit 2: Modeling in The Frequency Domain Part 5: Modeling Translational Mechanical SystemsDocument14 pagesUnit 2: Modeling in The Frequency Domain Part 5: Modeling Translational Mechanical SystemsANo ratings yet
- TF TestDocument10 pagesTF TestnemaderakeshNo ratings yet
- Wk8 Lectrure8 21nov2017 NewformatDocument14 pagesWk8 Lectrure8 21nov2017 Newformatهاني احمدNo ratings yet
- An Atlas of Engineering Dynamic Systems, Models, and Transfer FunctionsDocument37 pagesAn Atlas of Engineering Dynamic Systems, Models, and Transfer Functionshazem ab2009No ratings yet
- ch02 PDFDocument67 pagesch02 PDFSamNo ratings yet
- 2DOF Systems PDFDocument41 pages2DOF Systems PDFManavNo ratings yet
- Chapter 2Document7 pagesChapter 2Galal RabieNo ratings yet
- Eigen Value Problem - MDOF Free VibrationDocument18 pagesEigen Value Problem - MDOF Free Vibrationbhupender ghosliyaNo ratings yet
- Modelling of Mechanical System IIIDocument13 pagesModelling of Mechanical System IIIडॉ. इन्द्रसेन सिंहNo ratings yet
- 052 DOFand MdofDocument42 pages052 DOFand MdofAbdelhay ElomariNo ratings yet
- Topic03 StructuralDynamics PDFDocument62 pagesTopic03 StructuralDynamics PDFAlbert LiuNo ratings yet
- Modal AnalysisDocument14 pagesModal Analysismichael_r_reid652No ratings yet
- OL17 Chap2 TFopampMechDocument16 pagesOL17 Chap2 TFopampMechpchakraborty201072No ratings yet
- QBPT Test - Ii, - 05.04.2020Document13 pagesQBPT Test - Ii, - 05.04.2020DrNaresh SahuNo ratings yet
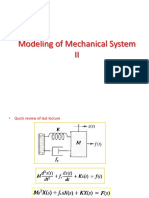
- Modeling of Mechanical System IIDocument11 pagesModeling of Mechanical System IIshrey saxenaNo ratings yet
- Castigliano's Compatibility Equation (Method of Least Work) - Redundant ForcesDocument4 pagesCastigliano's Compatibility Equation (Method of Least Work) - Redundant Forcesronnie oraleNo ratings yet
- Two-Degree-of-Freedom Systems: William J. Palm IIIDocument7 pagesTwo-Degree-of-Freedom Systems: William J. Palm IIIHensel KevinNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- Unit 2 Forced VibrationsDocument16 pagesUnit 2 Forced Vibrationsefgh21177No ratings yet
- Physics Final - My VersionDocument48 pagesPhysics Final - My VersiondfbdbNo ratings yet
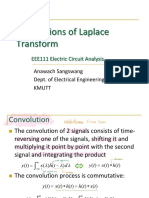
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- Lecture 3 ModelingDocument28 pagesLecture 3 ModelingSai AnoopNo ratings yet
- Lecture 3. Filtering in The Frequency DomainDocument123 pagesLecture 3. Filtering in The Frequency DomainAshish PatelNo ratings yet
- Signals and Systems (Practice Questions - Laplace Transform)Document26 pagesSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Lectur 10 UploadDocument13 pagesLectur 10 UploadYash RajNo ratings yet
- Simple Translational ProblemsDocument4 pagesSimple Translational ProblemsAbhay RanaNo ratings yet
- 2023 - Mathematical Modelling-Worked ExamplesDocument7 pages2023 - Mathematical Modelling-Worked ExamplesBoitumelo MolupeNo ratings yet
- Dynamic Systems EngineeringDocument13 pagesDynamic Systems EngineeringKimuli RayyanNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Mdof23-L-V16-Red 2Document113 pagesMdof23-L-V16-Red 2nfaayedNo ratings yet
- Ch1 3 ModelingDocument25 pagesCh1 3 ModelingSurendrapal SinghNo ratings yet
- EE207 Problem Set 1 IIT ROPARDocument7 pagesEE207 Problem Set 1 IIT ROPARsumithasreekumar5No ratings yet
- Chapter 3Document11 pagesChapter 3Galal RabieNo ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Lecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsDocument30 pagesLecture 06 Pole - Zeros and Time Response of First and 2nd Order SystemsAhmad RazaNo ratings yet
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionAhmad RazaNo ratings yet
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionAhmad RazaNo ratings yet
- Control Systems EngineeringDocument19 pagesControl Systems EngineeringAhmad RazaNo ratings yet
- 4-Electric Power GenerationDocument31 pages4-Electric Power GenerationCaribNo ratings yet
- Non-Ideal Gases: 3.1 Statistical Mechanics of Interacting Par-TiclesDocument56 pagesNon-Ideal Gases: 3.1 Statistical Mechanics of Interacting Par-TiclesRoy VeseyNo ratings yet
- Effective Parameters For Calculating Discharge Coef Sluice GatesDocument10 pagesEffective Parameters For Calculating Discharge Coef Sluice GatessebasfarsaNo ratings yet
- Experience of Specifying and Using Reactors in A Transmission NetworkDocument8 pagesExperience of Specifying and Using Reactors in A Transmission Networkmrjack1No ratings yet
- 3A.Wave Optics (198-224)Document27 pages3A.Wave Optics (198-224)Mohammed Junaid100% (1)
- Class 11 Chemistry New Book NotesDocument184 pagesClass 11 Chemistry New Book Notesadeeljameel810No ratings yet
- Microwave SpectrosDocument46 pagesMicrowave Spectros5fdt78kgscNo ratings yet
- ENSC3024 Ideal Gas Lab 1Document12 pagesENSC3024 Ideal Gas Lab 1Max ShervingtonNo ratings yet
- Synchronverters Inverters That Mimic Synchronous GeneratorsDocument34 pagesSynchronverters Inverters That Mimic Synchronous GeneratorsAbdou_AENo ratings yet
- Analysis by Displacement Methods (Slope Deflection and MomentDocument2 pagesAnalysis by Displacement Methods (Slope Deflection and Momentdisasa abebeNo ratings yet
- fb190329120134 PDFDocument131 pagesfb190329120134 PDFPoYing HuangNo ratings yet
- Navier Stokes EquationsDocument24 pagesNavier Stokes EquationsKarina Chavda100% (1)
- ELECTRIC CURRENTS IN ORGONE DEVICES (Part 2) - The Journal of Psychiatric Orgone TherapyDocument51 pagesELECTRIC CURRENTS IN ORGONE DEVICES (Part 2) - The Journal of Psychiatric Orgone TherapyRaul CamposNo ratings yet
- Problems Related To Pure BendingDocument15 pagesProblems Related To Pure BendingMuhammad Fazeel Khan0% (1)
- 2011 Physics Unit 3 Trial Exam: Chemology Education ServicesDocument36 pages2011 Physics Unit 3 Trial Exam: Chemology Education ServicesThanh TrươngNo ratings yet
- Isotopes PogilDocument5 pagesIsotopes Pogilapi-329661553100% (1)
- Work Energy PowerDocument5 pagesWork Energy PowerzetaamabelNo ratings yet
- Ch.3 Support Reactions of BeamsDocument5 pagesCh.3 Support Reactions of BeamsUmesh ShindeNo ratings yet
- Chapter 9: Center of Gravity and CentroidDocument10 pagesChapter 9: Center of Gravity and CentroidvictorNo ratings yet
- Antenna (Radio) : TerminologyDocument9 pagesAntenna (Radio) : Terminologymikeshinoda6No ratings yet
- Seismic Exploration Technique and ProcessingDocument211 pagesSeismic Exploration Technique and ProcessingDimas PradanaNo ratings yet
- Narayana Junior College. JR AIEEE & EAMCET IC. CDF Model Test.Document9 pagesNarayana Junior College. JR AIEEE & EAMCET IC. CDF Model Test.Vaishno Bharadwaj58% (19)
- Chapter 8 98Document7 pagesChapter 8 98Ravi KhandelwalNo ratings yet
- SOLUTION VECTOR ANALYSIS BY S M YUSUF PDF - Are You Looking For Solution VectorDocument6 pagesSOLUTION VECTOR ANALYSIS BY S M YUSUF PDF - Are You Looking For Solution VectorZara Malik67% (3)
- MotorStartTheory MasterDocument39 pagesMotorStartTheory MasterAlberto Suazo BasaezNo ratings yet
- Three Phase Induction RegulatorDocument5 pagesThree Phase Induction RegulatormohamedmohebNo ratings yet
- Secondary FlowDocument7 pagesSecondary Flowkallurkar23No ratings yet