
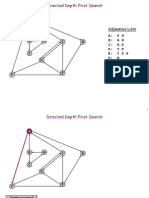
BFS & DFS
BFS & DFS
You might also like
- Treble Clef B-I-N-G-O: Note in The Space Treble Clef Note On The Line E, G, B, D, F F, A, C, EDocument5 pagesTreble Clef B-I-N-G-O: Note in The Space Treble Clef Note On The Line E, G, B, D, F F, A, C, EDanaila MariusNo ratings yet
- Self Reference CriterionDocument2 pagesSelf Reference CriterionJaemarie CamachoNo ratings yet
- Eng102 Fallacy HandoutsDocument2 pagesEng102 Fallacy Handoutsjeanninestanko0% (1)
- 51demo BfsDocument50 pages51demo Bfsroushan singhNo ratings yet
- 51demo BfsDocument50 pages51demo BfsJorge PradoNo ratings yet
- 51demo BfsDocument50 pages51demo Bfsanand_seshamNo ratings yet
- 51demo BfsDocument50 pages51demo BfsSavio De SouzaNo ratings yet
- Study Material2Document50 pagesStudy Material2Praju ThoratNo ratings yet
- A B D C: FrontDocument50 pagesA B D C: Frontsuprems006No ratings yet
- Breadth First SearchDocument50 pagesBreadth First SearchTancicleide GomesNo ratings yet
- A B D C: FrontDocument50 pagesA B D C: Frontkrsna2studyNo ratings yet
- A B D C: FrontDocument50 pagesA B D C: Front_Nishant_No ratings yet
- A B D C: FrontDocument50 pagesA B D C: FrontCarlos SrinivasanNo ratings yet
- 51demo BfsDocument50 pages51demo BfsJohn JJ CorsiNo ratings yet
- Review: Search Problem Formulation Review: Search Problem FormulationDocument59 pagesReview: Search Problem Formulation Review: Search Problem Formulationria jainNo ratings yet
- Presentation of Artificial IntligenceDocument42 pagesPresentation of Artificial IntligenceTahira YasmeenNo ratings yet
- State Space Search:: Breadth First and Depth FirstDocument20 pagesState Space Search:: Breadth First and Depth FirstvibhushaNo ratings yet
- 03 Uninformed SearchDocument115 pages03 Uninformed SearchNAFIZUR RAHMANNo ratings yet
- Bfs Dfs DemoDocument79 pagesBfs Dfs DemoBabuji BaskaranNo ratings yet
- Artificial IntelligenceDocument37 pagesArtificial IntelligenceKiran MudaliyarNo ratings yet
- Lecture 11 CSC 221 Graphs Searching - Traversal 28122022 013556pm 15122023 110255amDocument61 pagesLecture 11 CSC 221 Graphs Searching - Traversal 28122022 013556pm 15122023 110255amhammadalamgir778No ratings yet
- Expert SystemDocument124 pagesExpert SystemYogananda (MVGR EEE)No ratings yet
- B First Bin Tree Trav AlgDocument28 pagesB First Bin Tree Trav AlgJoe ManleyNo ratings yet
- Lecture5 Basic Traversal and Search TechniquesDocument68 pagesLecture5 Basic Traversal and Search Techniquesmna shourov100% (1)
- Searching Strategies. AI PlanningDocument92 pagesSearching Strategies. AI PlanningWaseem QassabNo ratings yet
- Problem Solving by SearchDocument37 pagesProblem Solving by SearchJust FunNo ratings yet
- Artificial Intelligence Lecture No. 7,8Document75 pagesArtificial Intelligence Lecture No. 7,8Syed SamiNo ratings yet
- CS632 Lecture 05Document23 pagesCS632 Lecture 05Muhammad AbubakarNo ratings yet
- Traversal: Linear Data Structures Linked Lists ArraysDocument3 pagesTraversal: Linear Data Structures Linked Lists ArraysAnbarasan PeriasamyNo ratings yet
- Lec 13Document27 pagesLec 13무나No ratings yet
- FAL (2022-23) CSE3002 ETH AP2022232000601 Reference Material I 10-Sep-2022 DFS BFSDocument41 pagesFAL (2022-23) CSE3002 ETH AP2022232000601 Reference Material I 10-Sep-2022 DFS BFSSagar ReddyNo ratings yet
- Travesal MethodsDocument14 pagesTravesal MethodsOdirile MasogoNo ratings yet
- Read Weiss, 9.6 Depth-First Search and 10.5 Backtracking AlgorithmsDocument27 pagesRead Weiss, 9.6 Depth-First Search and 10.5 Backtracking AlgorithmsmuditNo ratings yet
- Lecture On AI - Uninformed SearchDocument17 pagesLecture On AI - Uninformed SearchGangaram SiddamNo ratings yet
- Binary Tree Travers AlDocument79 pagesBinary Tree Travers AlAman Pushpinder BirdiNo ratings yet
- Seven Position of C Major Diatonic Scale PDFDocument1 pageSeven Position of C Major Diatonic Scale PDFjohnNo ratings yet
- 5.demo Dfs UndirectedDocument30 pages5.demo Dfs UndirectedShah jalalNo ratings yet
- Binary Tree and Its TraversalDocument67 pagesBinary Tree and Its TraversalsnehaNo ratings yet
- Search in AIDocument31 pagesSearch in AISubham BairagyaNo ratings yet
- AI File - 04 PDFDocument50 pagesAI File - 04 PDFNahim's kitchenNo ratings yet
- Lec 11 (DFS and BFS)Document53 pagesLec 11 (DFS and BFS)Hemant SahuNo ratings yet
- UninformedSearch271 sq2010 3Document39 pagesUninformedSearch271 sq2010 3RolandoNo ratings yet
- Unit 4 - Uninformed Search TechniquesDocument24 pagesUnit 4 - Uninformed Search TechniquessimoncowelliamNo ratings yet
- AIR - MCQ's (Unit 1-6)Document20 pagesAIR - MCQ's (Unit 1-6)sourabh utpatNo ratings yet
- Problem Solving by SearchingDocument47 pagesProblem Solving by SearchingAhmed KhaledNo ratings yet
- BASIC READING D37 (Alphabet Review 2)Document9 pagesBASIC READING D37 (Alphabet Review 2)Red TortosaNo ratings yet
- What Is Traversal?Document14 pagesWhat Is Traversal?deepinder singhNo ratings yet
- 03 HsearchDocument61 pages03 Hsearchhimawari.learner007No ratings yet
- Lec3 4Document54 pagesLec3 4MazharulislamNo ratings yet
- Lecture On AI - Uninformed Search MechanismsDocument8 pagesLecture On AI - Uninformed Search MechanismsSujit DungaNo ratings yet
- Tree SearchingDocument16 pagesTree SearchingNitesh MishraNo ratings yet
- Unit Vi TreesDocument79 pagesUnit Vi TreesWil SonNo ratings yet
- FAI Module 2Document24 pagesFAI Module 2hackercreations0No ratings yet
- Uninf Searchspring 07Document40 pagesUninf Searchspring 07Ying YangNo ratings yet
- Data Structures & Algorithms (CS-212) : Week 9: TreesDocument57 pagesData Structures & Algorithms (CS-212) : Week 9: TreesMalik Ghulam HurNo ratings yet
- Sking For and Giving Directions.Document5 pagesSking For and Giving Directions.Alejandra Duarte GuzmanNo ratings yet
- Unit 4 - TreesDocument162 pagesUnit 4 - Treesanmolbansal1969No ratings yet
- UPDATED ASD 2-2A ELEVATIONS - 082019-Model 1Document1 pageUPDATED ASD 2-2A ELEVATIONS - 082019-Model 1ds18.albertcastroNo ratings yet
- Demo Dfs Directed 1Document18 pagesDemo Dfs Directed 1_Nishant_No ratings yet
- Score Reading/ Ensemble Performance: Lesson Aim Learn The Notes of The Bass Clef Learn The Meaning of The Term Ostinato'Document11 pagesScore Reading/ Ensemble Performance: Lesson Aim Learn The Notes of The Bass Clef Learn The Meaning of The Term Ostinato'api-19785139No ratings yet
- DAA Notes - 0 95 124Document30 pagesDAA Notes - 0 95 124MR.M.MURALI KRISHNANNo ratings yet
- 2019 (Gatsov-Nedelcheva) Pietrele 2 Lithic-Industry (Small)Document177 pages2019 (Gatsov-Nedelcheva) Pietrele 2 Lithic-Industry (Small)Clive BonsallNo ratings yet
- Financial Behavior of Millenial Genration On Investment DecisionDocument8 pagesFinancial Behavior of Millenial Genration On Investment DecisionYuslia Nandha Anasta SariNo ratings yet
- Gas Kiln ManualDocument28 pagesGas Kiln ManualNenadBojovicNo ratings yet
- Economics:Presentation On Law of Equi Marginal Utility...Document11 pagesEconomics:Presentation On Law of Equi Marginal Utility...vinay rakshithNo ratings yet
- Ada358766 (1) (2021 - 06 - 28 00 - 45 - 34 Utc)Document370 pagesAda358766 (1) (2021 - 06 - 28 00 - 45 - 34 Utc)Nicodemos de JesusNo ratings yet
- F520Document2 pagesF520Marcos AldrovandiNo ratings yet
- TIP35/35A/35B/35C: Silicon NPN Power TransistorsDocument4 pagesTIP35/35A/35B/35C: Silicon NPN Power TransistorsJose David Perez ParadaNo ratings yet
- 214.039 Operation of Sieve Shaker2012Document3 pages214.039 Operation of Sieve Shaker2012Pradeep KumarNo ratings yet
- 2. New lesson a. Matrix: Số câu: 8 Số điểm:2 Tỉ lệ %: 20%Document5 pages2. New lesson a. Matrix: Số câu: 8 Số điểm:2 Tỉ lệ %: 20%Hoàng LêNo ratings yet
- 368 Truth Table Abbreviated Cheat SheetDocument2 pages368 Truth Table Abbreviated Cheat SheetLauren PickNo ratings yet
- Atlas 3CR12 DatasheetDocument3 pagesAtlas 3CR12 DatasheettridatylNo ratings yet
- Loba Chemie Price List 2018-19 PDFDocument288 pagesLoba Chemie Price List 2018-19 PDFdelta lab sangliNo ratings yet
- Internal Aids To Construction: Project BY: Mansi Verma 133/18Document18 pagesInternal Aids To Construction: Project BY: Mansi Verma 133/18Mansi VermaNo ratings yet
- Reciprocating Compressor Power Calculation Part 2Document6 pagesReciprocating Compressor Power Calculation Part 2Rifka Aisyah0% (1)
- System LogDocument199 pagesSystem LogAustinNo ratings yet
- Cl400e VDocument2 pagesCl400e VCá ThuNo ratings yet
- The Gmo Emperor Has No Clothes PDFDocument251 pagesThe Gmo Emperor Has No Clothes PDFkouadio yao Armand100% (1)
- Quick Start PF70Document18 pagesQuick Start PF70selvan_rsk761No ratings yet
- Ansys Fluent Brings CFD Performance With Intel Processors and FabricsDocument8 pagesAnsys Fluent Brings CFD Performance With Intel Processors and FabricsSaid FerdjallahNo ratings yet
- Design of Gear BoxDocument19 pagesDesign of Gear BoxSUMIT MALUSARE100% (1)
- 33 Relative and TrueDocument32 pages33 Relative and TrueArun Ketu SethNo ratings yet
- Foundation Design ProjectDocument31 pagesFoundation Design ProjectChoco Late100% (1)
- Childhood and Growing UpDocument181 pagesChildhood and Growing UpManichander100% (2)
- ART300Document45 pagesART300Gerlyn OrdonioNo ratings yet
- RectiDocument7 pagesRectiaskj78100% (1)
- Suitcase X-Treme 12Vs: Ce and Non-Ce ModelsDocument44 pagesSuitcase X-Treme 12Vs: Ce and Non-Ce ModelsBaskoro PMCKNo ratings yet
- Staad Pro Stainless Steel ReportDocument29 pagesStaad Pro Stainless Steel ReportRaviteja Girijala100% (1)
- Acoustic PhoneticsDocument19 pagesAcoustic PhoneticsRihane El Alaoui100% (1)























































































Download as ppt, pdf, or txt
You might also like
- Treble Clef B-I-N-G-O: Note in The Space Treble Clef Note On The Line E, G, B, D, F F, A, C, EDocument5 pagesTreble Clef B-I-N-G-O: Note in The Space Treble Clef Note On The Line E, G, B, D, F F, A, C, EDanaila MariusNo ratings yet
- Self Reference CriterionDocument2 pagesSelf Reference CriterionJaemarie CamachoNo ratings yet
- Eng102 Fallacy HandoutsDocument2 pagesEng102 Fallacy Handoutsjeanninestanko0% (1)
- 51demo BfsDocument50 pages51demo Bfsroushan singhNo ratings yet
- 51demo BfsDocument50 pages51demo BfsJorge PradoNo ratings yet
- 51demo BfsDocument50 pages51demo Bfsanand_seshamNo ratings yet
- 51demo BfsDocument50 pages51demo BfsSavio De SouzaNo ratings yet
- Study Material2Document50 pagesStudy Material2Praju ThoratNo ratings yet
- A B D C: FrontDocument50 pagesA B D C: Frontsuprems006No ratings yet
- Breadth First SearchDocument50 pagesBreadth First SearchTancicleide GomesNo ratings yet
- A B D C: FrontDocument50 pagesA B D C: Frontkrsna2studyNo ratings yet
- A B D C: FrontDocument50 pagesA B D C: Front_Nishant_No ratings yet
- A B D C: FrontDocument50 pagesA B D C: FrontCarlos SrinivasanNo ratings yet
- 51demo BfsDocument50 pages51demo BfsJohn JJ CorsiNo ratings yet
- Review: Search Problem Formulation Review: Search Problem FormulationDocument59 pagesReview: Search Problem Formulation Review: Search Problem Formulationria jainNo ratings yet
- Presentation of Artificial IntligenceDocument42 pagesPresentation of Artificial IntligenceTahira YasmeenNo ratings yet
- State Space Search:: Breadth First and Depth FirstDocument20 pagesState Space Search:: Breadth First and Depth FirstvibhushaNo ratings yet
- 03 Uninformed SearchDocument115 pages03 Uninformed SearchNAFIZUR RAHMANNo ratings yet
- Bfs Dfs DemoDocument79 pagesBfs Dfs DemoBabuji BaskaranNo ratings yet
- Artificial IntelligenceDocument37 pagesArtificial IntelligenceKiran MudaliyarNo ratings yet
- Lecture 11 CSC 221 Graphs Searching - Traversal 28122022 013556pm 15122023 110255amDocument61 pagesLecture 11 CSC 221 Graphs Searching - Traversal 28122022 013556pm 15122023 110255amhammadalamgir778No ratings yet
- Expert SystemDocument124 pagesExpert SystemYogananda (MVGR EEE)No ratings yet
- B First Bin Tree Trav AlgDocument28 pagesB First Bin Tree Trav AlgJoe ManleyNo ratings yet
- Lecture5 Basic Traversal and Search TechniquesDocument68 pagesLecture5 Basic Traversal and Search Techniquesmna shourov100% (1)
- Searching Strategies. AI PlanningDocument92 pagesSearching Strategies. AI PlanningWaseem QassabNo ratings yet
- Problem Solving by SearchDocument37 pagesProblem Solving by SearchJust FunNo ratings yet
- Artificial Intelligence Lecture No. 7,8Document75 pagesArtificial Intelligence Lecture No. 7,8Syed SamiNo ratings yet
- CS632 Lecture 05Document23 pagesCS632 Lecture 05Muhammad AbubakarNo ratings yet
- Traversal: Linear Data Structures Linked Lists ArraysDocument3 pagesTraversal: Linear Data Structures Linked Lists ArraysAnbarasan PeriasamyNo ratings yet
- Lec 13Document27 pagesLec 13무나No ratings yet
- FAL (2022-23) CSE3002 ETH AP2022232000601 Reference Material I 10-Sep-2022 DFS BFSDocument41 pagesFAL (2022-23) CSE3002 ETH AP2022232000601 Reference Material I 10-Sep-2022 DFS BFSSagar ReddyNo ratings yet
- Travesal MethodsDocument14 pagesTravesal MethodsOdirile MasogoNo ratings yet
- Read Weiss, 9.6 Depth-First Search and 10.5 Backtracking AlgorithmsDocument27 pagesRead Weiss, 9.6 Depth-First Search and 10.5 Backtracking AlgorithmsmuditNo ratings yet
- Lecture On AI - Uninformed SearchDocument17 pagesLecture On AI - Uninformed SearchGangaram SiddamNo ratings yet
- Binary Tree Travers AlDocument79 pagesBinary Tree Travers AlAman Pushpinder BirdiNo ratings yet
- Seven Position of C Major Diatonic Scale PDFDocument1 pageSeven Position of C Major Diatonic Scale PDFjohnNo ratings yet
- 5.demo Dfs UndirectedDocument30 pages5.demo Dfs UndirectedShah jalalNo ratings yet
- Binary Tree and Its TraversalDocument67 pagesBinary Tree and Its TraversalsnehaNo ratings yet
- Search in AIDocument31 pagesSearch in AISubham BairagyaNo ratings yet
- AI File - 04 PDFDocument50 pagesAI File - 04 PDFNahim's kitchenNo ratings yet
- Lec 11 (DFS and BFS)Document53 pagesLec 11 (DFS and BFS)Hemant SahuNo ratings yet
- UninformedSearch271 sq2010 3Document39 pagesUninformedSearch271 sq2010 3RolandoNo ratings yet
- Unit 4 - Uninformed Search TechniquesDocument24 pagesUnit 4 - Uninformed Search TechniquessimoncowelliamNo ratings yet
- AIR - MCQ's (Unit 1-6)Document20 pagesAIR - MCQ's (Unit 1-6)sourabh utpatNo ratings yet
- Problem Solving by SearchingDocument47 pagesProblem Solving by SearchingAhmed KhaledNo ratings yet
- BASIC READING D37 (Alphabet Review 2)Document9 pagesBASIC READING D37 (Alphabet Review 2)Red TortosaNo ratings yet
- What Is Traversal?Document14 pagesWhat Is Traversal?deepinder singhNo ratings yet
- 03 HsearchDocument61 pages03 Hsearchhimawari.learner007No ratings yet
- Lec3 4Document54 pagesLec3 4MazharulislamNo ratings yet
- Lecture On AI - Uninformed Search MechanismsDocument8 pagesLecture On AI - Uninformed Search MechanismsSujit DungaNo ratings yet
- Tree SearchingDocument16 pagesTree SearchingNitesh MishraNo ratings yet
- Unit Vi TreesDocument79 pagesUnit Vi TreesWil SonNo ratings yet
- FAI Module 2Document24 pagesFAI Module 2hackercreations0No ratings yet
- Uninf Searchspring 07Document40 pagesUninf Searchspring 07Ying YangNo ratings yet
- Data Structures & Algorithms (CS-212) : Week 9: TreesDocument57 pagesData Structures & Algorithms (CS-212) : Week 9: TreesMalik Ghulam HurNo ratings yet
- Sking For and Giving Directions.Document5 pagesSking For and Giving Directions.Alejandra Duarte GuzmanNo ratings yet
- Unit 4 - TreesDocument162 pagesUnit 4 - Treesanmolbansal1969No ratings yet
- UPDATED ASD 2-2A ELEVATIONS - 082019-Model 1Document1 pageUPDATED ASD 2-2A ELEVATIONS - 082019-Model 1ds18.albertcastroNo ratings yet
- Demo Dfs Directed 1Document18 pagesDemo Dfs Directed 1_Nishant_No ratings yet
- Score Reading/ Ensemble Performance: Lesson Aim Learn The Notes of The Bass Clef Learn The Meaning of The Term Ostinato'Document11 pagesScore Reading/ Ensemble Performance: Lesson Aim Learn The Notes of The Bass Clef Learn The Meaning of The Term Ostinato'api-19785139No ratings yet
- DAA Notes - 0 95 124Document30 pagesDAA Notes - 0 95 124MR.M.MURALI KRISHNANNo ratings yet
- 2019 (Gatsov-Nedelcheva) Pietrele 2 Lithic-Industry (Small)Document177 pages2019 (Gatsov-Nedelcheva) Pietrele 2 Lithic-Industry (Small)Clive BonsallNo ratings yet
- Financial Behavior of Millenial Genration On Investment DecisionDocument8 pagesFinancial Behavior of Millenial Genration On Investment DecisionYuslia Nandha Anasta SariNo ratings yet
- Gas Kiln ManualDocument28 pagesGas Kiln ManualNenadBojovicNo ratings yet
- Economics:Presentation On Law of Equi Marginal Utility...Document11 pagesEconomics:Presentation On Law of Equi Marginal Utility...vinay rakshithNo ratings yet
- Ada358766 (1) (2021 - 06 - 28 00 - 45 - 34 Utc)Document370 pagesAda358766 (1) (2021 - 06 - 28 00 - 45 - 34 Utc)Nicodemos de JesusNo ratings yet
- F520Document2 pagesF520Marcos AldrovandiNo ratings yet
- TIP35/35A/35B/35C: Silicon NPN Power TransistorsDocument4 pagesTIP35/35A/35B/35C: Silicon NPN Power TransistorsJose David Perez ParadaNo ratings yet
- 214.039 Operation of Sieve Shaker2012Document3 pages214.039 Operation of Sieve Shaker2012Pradeep KumarNo ratings yet
- 2. New lesson a. Matrix: Số câu: 8 Số điểm:2 Tỉ lệ %: 20%Document5 pages2. New lesson a. Matrix: Số câu: 8 Số điểm:2 Tỉ lệ %: 20%Hoàng LêNo ratings yet
- 368 Truth Table Abbreviated Cheat SheetDocument2 pages368 Truth Table Abbreviated Cheat SheetLauren PickNo ratings yet
- Atlas 3CR12 DatasheetDocument3 pagesAtlas 3CR12 DatasheettridatylNo ratings yet
- Loba Chemie Price List 2018-19 PDFDocument288 pagesLoba Chemie Price List 2018-19 PDFdelta lab sangliNo ratings yet
- Internal Aids To Construction: Project BY: Mansi Verma 133/18Document18 pagesInternal Aids To Construction: Project BY: Mansi Verma 133/18Mansi VermaNo ratings yet
- Reciprocating Compressor Power Calculation Part 2Document6 pagesReciprocating Compressor Power Calculation Part 2Rifka Aisyah0% (1)
- System LogDocument199 pagesSystem LogAustinNo ratings yet
- Cl400e VDocument2 pagesCl400e VCá ThuNo ratings yet
- The Gmo Emperor Has No Clothes PDFDocument251 pagesThe Gmo Emperor Has No Clothes PDFkouadio yao Armand100% (1)
- Quick Start PF70Document18 pagesQuick Start PF70selvan_rsk761No ratings yet
- Ansys Fluent Brings CFD Performance With Intel Processors and FabricsDocument8 pagesAnsys Fluent Brings CFD Performance With Intel Processors and FabricsSaid FerdjallahNo ratings yet
- Design of Gear BoxDocument19 pagesDesign of Gear BoxSUMIT MALUSARE100% (1)
- 33 Relative and TrueDocument32 pages33 Relative and TrueArun Ketu SethNo ratings yet
- Foundation Design ProjectDocument31 pagesFoundation Design ProjectChoco Late100% (1)
- Childhood and Growing UpDocument181 pagesChildhood and Growing UpManichander100% (2)
- ART300Document45 pagesART300Gerlyn OrdonioNo ratings yet
- RectiDocument7 pagesRectiaskj78100% (1)
- Suitcase X-Treme 12Vs: Ce and Non-Ce ModelsDocument44 pagesSuitcase X-Treme 12Vs: Ce and Non-Ce ModelsBaskoro PMCKNo ratings yet
- Staad Pro Stainless Steel ReportDocument29 pagesStaad Pro Stainless Steel ReportRaviteja Girijala100% (1)
- Acoustic PhoneticsDocument19 pagesAcoustic PhoneticsRihane El Alaoui100% (1)