Download as pptx, pdf, or txt
You might also like
- Transfer Function On RLC CircuitsDocument38 pagesTransfer Function On RLC CircuitsMarasigan Ryan50% (2)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- ETC07402 Communication Switching Systems - Question Bank - With Answers Rev 03Document45 pagesETC07402 Communication Switching Systems - Question Bank - With Answers Rev 03Renatus Katundu100% (4)
- Principles of Measuring Instruments - B: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Document82 pagesPrinciples of Measuring Instruments - B: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Renatus KatunduNo ratings yet
- Week3 5Document22 pagesWeek3 5Abdullah MahsudNo ratings yet
- First Order SystemDocument45 pagesFirst Order SystemKrishna KumarNo ratings yet
- I UNIT Part - 1Document46 pagesI UNIT Part - 1Krishna KumarNo ratings yet
- Lecture 7 Dynamic Modelling and Transient ResponseDocument21 pagesLecture 7 Dynamic Modelling and Transient ResponseKabo MphanyaneNo ratings yet
- Chapter 4Document86 pagesChapter 4TejkumarigurungNo ratings yet
- Discrete Time Systems Discrete Time Systems & Difference EquationsDocument44 pagesDiscrete Time Systems Discrete Time Systems & Difference EquationsRonald George100% (1)
- Chapter 4Document28 pagesChapter 4Omar QasimNo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Control Engineering I PDFDocument15 pagesControl Engineering I PDFkipkorir kemboiNo ratings yet
- FEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Document36 pagesFEEDCON - Lesson 08 - Closed-Loop Control Systems Part 2Junaid YNo ratings yet
- W EE 418 - Lecture 2 ModelingDocument20 pagesW EE 418 - Lecture 2 ModelingGGAP LASTNo ratings yet
- Dynamic Characterstics Final PDFDocument102 pagesDynamic Characterstics Final PDFJay ChoudharyNo ratings yet
- Signals and Systems - Chapter 2Document27 pagesSignals and Systems - Chapter 2altwirqiNo ratings yet
- Class 15 Sept 20Document13 pagesClass 15 Sept 20DeepthiNo ratings yet
- First Order System TF Through Temperature SensorDocument12 pagesFirst Order System TF Through Temperature SensorFahad ChaudharyNo ratings yet
- Unit-III-State Space Analysis in Discrete Time Control SystemDocument49 pagesUnit-III-State Space Analysis in Discrete Time Control Systemkrushnasamy subramaniyan100% (2)
- ELM 322, Control Systems Control Systems Spring 2015Document37 pagesELM 322, Control Systems Control Systems Spring 2015kaanNo ratings yet
- Chapter - 2 - Mathematical Models of Systems - W2015Document75 pagesChapter - 2 - Mathematical Models of Systems - W2015120200421003nNo ratings yet
- Laplace TTDocument56 pagesLaplace TTFares AlghamdiNo ratings yet
- M&I Lect 3Document27 pagesM&I Lect 3Hassan -No ratings yet
- Chapter 2 IPCDocument45 pagesChapter 2 IPCkirubelNo ratings yet
- Experiment 2 Performance of First Order and Second Order SystemsDocument6 pagesExperiment 2 Performance of First Order and Second Order SystemsLana JalalNo ratings yet
- Chap No.3 Time Response and Stability AnalysisDocument71 pagesChap No.3 Time Response and Stability AnalysissomefactaNo ratings yet
- Generalized Performance Characteristics of Instruments: Instructor: DR Alivelu M ParimiDocument32 pagesGeneralized Performance Characteristics of Instruments: Instructor: DR Alivelu M ParimiSaketh DahagamNo ratings yet
- 4.1 - Analysis Based On Transfer FunctionDocument56 pages4.1 - Analysis Based On Transfer FunctionMarceloNo ratings yet
- Lecture 2Document52 pagesLecture 2faruktokuslu16No ratings yet
- Advanced Optimal Control SystemsDocument49 pagesAdvanced Optimal Control SystemsTsedenia TamiruNo ratings yet
- Methods and Algorithms For Advanced Process ControlDocument8 pagesMethods and Algorithms For Advanced Process ControlJohn CoucNo ratings yet
- Lecture 3 - 2Document42 pagesLecture 3 - 2faruktokuslu16No ratings yet
- Dynamic SystemDocument28 pagesDynamic SystemA - STARNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDocument27 pagesControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNo ratings yet
- Control System Engineering 2 MarksDocument18 pagesControl System Engineering 2 MarksSeenu CnuNo ratings yet
- Unit 02Document85 pagesUnit 02MD SHAHRIARMAHMUDNo ratings yet
- Time Response AnalysisDocument37 pagesTime Response Analysis7014KANISHKA JAISWALNo ratings yet
- Debre Tabor University: Faculty of Technology Department of Electromechanical EngineeringDocument46 pagesDebre Tabor University: Faculty of Technology Department of Electromechanical EngineeringBIRSHNo ratings yet
- Chapter 2Document31 pagesChapter 2Endalk SimegnNo ratings yet
- Control 3-Lec 3 - PC Definitions With Sheet 2 SolutionDocument23 pagesControl 3-Lec 3 - PC Definitions With Sheet 2 Solutionmohammed abd el aleemNo ratings yet
- Embedded Control SystemsDocument53 pagesEmbedded Control SystemsDebayan RoyNo ratings yet
- 5.2 - Design Based On State SpaceDocument87 pages5.2 - Design Based On State SpaceMarceloNo ratings yet
- Presentation On Laplace and Inverse Transform, TF and TD ModelingDocument20 pagesPresentation On Laplace and Inverse Transform, TF and TD ModelingHassan RazaNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- EE5205 Control System DesignDocument44 pagesEE5205 Control System DesignntbandaraNo ratings yet
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument37 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsSuyash Dahake VlogsNo ratings yet
- Mecha U2Document87 pagesMecha U2lki06343No ratings yet
- Week 10.2Document21 pagesWeek 10.2Faizan RehmanNo ratings yet
- Lecture 3Document24 pagesLecture 3iptradersNo ratings yet
- CHE160 2022-2023 Module4Document39 pagesCHE160 2022-2023 Module4anthonyNo ratings yet
- Mathematical ModelingDocument43 pagesMathematical Modelingashoka.k100% (4)
- Chapter FourDocument57 pagesChapter FourBelayneh AbirhamNo ratings yet
- Analyze and Determine Various Parameter of Speed Controlled System ApparatusDocument2 pagesAnalyze and Determine Various Parameter of Speed Controlled System ApparatusKalim KhanNo ratings yet
- Null 1Document24 pagesNull 1Waleed HåšhįmNo ratings yet
- First Order SystemDocument21 pagesFirst Order SystemNiranjan BeheraNo ratings yet
- Time Response Analysis - First Order SystemDocument32 pagesTime Response Analysis - First Order Systemearnest normanNo ratings yet
- Advanced Control, Lecture 2,3, Modeling and LinearizationDocument48 pagesAdvanced Control, Lecture 2,3, Modeling and LinearizationsepehrNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Satellite Communication ETU 08107: by Dr. Paul Fahamuel MmbagaDocument55 pagesSatellite Communication ETU 08107: by Dr. Paul Fahamuel MmbagaRenatus KatunduNo ratings yet
- Hypothesis PresentationDocument12 pagesHypothesis PresentationRenatus KatunduNo ratings yet
- Research DesignDocument64 pagesResearch DesignRenatus KatunduNo ratings yet
- Pepa 2Document25 pagesPepa 2Renatus KatunduNo ratings yet
- Review of The Related LiteratureDocument14 pagesReview of The Related LiteratureRenatus KatunduNo ratings yet
- I&M Lect 4Document57 pagesI&M Lect 4Renatus KatunduNo ratings yet
- Broadcasting AssignmentDocument24 pagesBroadcasting AssignmentRenatus Katundu100% (1)
- Principles of Measuring Instruments: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Document77 pagesPrinciples of Measuring Instruments: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Renatus KatunduNo ratings yet
- Maktech Telecoms Company Profile PDFDocument24 pagesMaktech Telecoms Company Profile PDFRenatus Katundu100% (1)
- Adjustments and Calibrations of Measuring InstrumentsDocument37 pagesAdjustments and Calibrations of Measuring InstrumentsRenatus KatunduNo ratings yet
- Statistical Computing in Matlab: AMS 597 Ling LengDocument23 pagesStatistical Computing in Matlab: AMS 597 Ling LengRenatus KatunduNo ratings yet
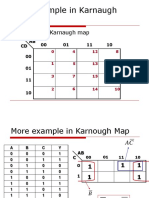
- More Example in Karnaugh MapsDocument27 pagesMore Example in Karnaugh MapsRenatus KatunduNo ratings yet
- Principles of Measuring Instruments - B: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Document82 pagesPrinciples of Measuring Instruments - B: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Renatus KatunduNo ratings yet
- Digital Gates, Logic Expression and Boolean ExpressionDocument16 pagesDigital Gates, Logic Expression and Boolean ExpressionRenatus KatunduNo ratings yet
- Principles of Measuring Instruments: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Document71 pagesPrinciples of Measuring Instruments: Presenter: Dr. Kenedy Aliila Greyson Email: Mobile: +255-654 149 540Renatus KatunduNo ratings yet
- Transmission Lines Measurements: High FrequenciesDocument28 pagesTransmission Lines Measurements: High FrequenciesRenatus KatunduNo ratings yet
- Capitulo 6Document33 pagesCapitulo 6Alberto Cañongo100% (1)
- System Identification and Estimation in LabVIEWDocument99 pagesSystem Identification and Estimation in LabVIEWDavidleonardo GalindoNo ratings yet
- Q&A BANK at SIGNAL SYSTEMDocument5 pagesQ&A BANK at SIGNAL SYSTEMZulkarnain DahalanNo ratings yet
- RLC Circuit Transfer Functions - KSB - 03 Aug 2020Document44 pagesRLC Circuit Transfer Functions - KSB - 03 Aug 2020Kì Hyö JüngNo ratings yet
- Introduction To Control Theory Including Optimal ControlDocument60 pagesIntroduction To Control Theory Including Optimal Controlapi-3698538100% (1)
- Average Current-Mode Control PDFDocument8 pagesAverage Current-Mode Control PDFQuickerManNo ratings yet
- Lab 3Document14 pagesLab 3Maitha SaeedNo ratings yet
- Transient Analysis of An Earthing System During Lightning Strike ExposureDocument7 pagesTransient Analysis of An Earthing System During Lightning Strike Exposureamit_scribd17No ratings yet
- MEC3457 Computer Lab 1 PDFDocument8 pagesMEC3457 Computer Lab 1 PDFMuhammad Abbas RawjaniNo ratings yet
- Lab 08 (Block Diagram Reduction)Document13 pagesLab 08 (Block Diagram Reduction)Umer EhsanNo ratings yet
- 16EC3203 Control Systems EngineeringDocument260 pages16EC3203 Control Systems EngineeringDivyaJ100% (1)
- 58202-mt - Advanced Process ControlDocument2 pages58202-mt - Advanced Process ControlSRINIVASA RAO GANTANo ratings yet
- ACS125: Systems Modelling and SimulationDocument11 pagesACS125: Systems Modelling and SimulationAmir BotrosNo ratings yet
- Tuning of Power System StabilizerDocument31 pagesTuning of Power System StabilizerRajesh PrasadNo ratings yet
- Block Diagram ReductionDocument14 pagesBlock Diagram ReductionJamal Mesidor100% (2)
- Practical Considerations: in Practical High-Voltage VacuumDocument3 pagesPractical Considerations: in Practical High-Voltage Vacuumliu5031No ratings yet
- Assignment 4Document3 pagesAssignment 4Zain NadeemNo ratings yet
- Lecture-3 Modeling of Translational Mechanical SystemsDocument23 pagesLecture-3 Modeling of Translational Mechanical SystemsMuneeb JawaidNo ratings yet
- Instrumentation and Process Control Sample ChaptersDocument18 pagesInstrumentation and Process Control Sample ChaptersGurunath EpiliNo ratings yet
- LabInstr EE370L Lab2Document6 pagesLabInstr EE370L Lab2Engr Haseena JabbarNo ratings yet
- Effect of PD Controller EIE18018Document14 pagesEffect of PD Controller EIE18018hirthikNo ratings yet
- Lab Experiment 2 L Resistance and Time Constant For Liquid Level SystemDocument7 pagesLab Experiment 2 L Resistance and Time Constant For Liquid Level SystemRicky JayNo ratings yet
- Electro Hydraulics: Control Technology ConceptsDocument98 pagesElectro Hydraulics: Control Technology Concepts@nshu_theachiever88% (8)
- Datasheet lm20Document10 pagesDatasheet lm20InaGalusNo ratings yet
- Input Filter Design by EricksonDocument49 pagesInput Filter Design by EricksonshrikrisNo ratings yet
- Briefguidetrc3600 Mae3408 s2 2018Document3 pagesBriefguidetrc3600 Mae3408 s2 2018Dan DMNo ratings yet
- Wideband 90° Phase Shifters: O. IH (JW) 1 - (7rDocument2 pagesWideband 90° Phase Shifters: O. IH (JW) 1 - (7rCristel BautistaNo ratings yet
- Robust Design of Mass-Uncertain Rolling-Pendulum TMDs ForDocument21 pagesRobust Design of Mass-Uncertain Rolling-Pendulum TMDs ForDiego FloresNo ratings yet
- Electrical Network Transfer Function PDFDocument14 pagesElectrical Network Transfer Function PDFbalvez nickmarNo ratings yet
- A. B. C. D.: 1. For The System in The Given Figure The Characteristic Equation IsDocument10 pagesA. B. C. D.: 1. For The System in The Given Figure The Characteristic Equation IsArmando LiosNo ratings yet