Download as ppt, pdf, or txt
You might also like
- 1108 SolutionsDocument13 pages1108 SolutionsBHAVYA MALIK 204052100% (1)
- HW3Document3 pagesHW3angy_1123No ratings yet
- Report On Century Pulp & PaperDocument43 pagesReport On Century Pulp & Paperyashaahmadnasiaahmad91% (11)
- Image Segmentation of Historical Documents: Department of Electronics and Systems - UFPE - Brazil (Cabm, RDL) @Document4 pagesImage Segmentation of Historical Documents: Department of Electronics and Systems - UFPE - Brazil (Cabm, RDL) @Mustafa Troy TroyNo ratings yet
- Discriminative and Generative Methods For Bags of Features: Zebra Non-ZebraDocument40 pagesDiscriminative and Generative Methods For Bags of Features: Zebra Non-ZebraramnbantunNo ratings yet
- Image Restoration TechniquesDocument39 pagesImage Restoration TechniquesAbysz100% (1)
- Modelling Shot Lengths of Hollywood Motion Pictures With The Dagum DistributionDocument19 pagesModelling Shot Lengths of Hollywood Motion Pictures With The Dagum Distributionopenid_HKfXPpgwNo ratings yet
- MSBD 5010 (Fall 2020) : Assignment 1Document15 pagesMSBD 5010 (Fall 2020) : Assignment 1Eric WongNo ratings yet
- MembershipDocument24 pagesMembershipisla0% (1)
- Automatic Gradient Threshold Determination For Edge DetectionDocument4 pagesAutomatic Gradient Threshold Determination For Edge Detectionapi-3706534No ratings yet
- Lecture Week 2B 2018 PDFDocument87 pagesLecture Week 2B 2018 PDFalfalfa manNo ratings yet
- Introduction To Maximum Entropy Models: Adwait Ratnaparkhi Yahoo! LabsDocument46 pagesIntroduction To Maximum Entropy Models: Adwait Ratnaparkhi Yahoo! LabsMNo ratings yet
- Lecture 15: Bayesian Networks III: CS221 / Autumn 2015 / LiangDocument70 pagesLecture 15: Bayesian Networks III: CS221 / Autumn 2015 / LiangBillybob EdwardsNo ratings yet
- A Robust Real Time Face DetectionDocument55 pagesA Robust Real Time Face DetectionGaurav Veer SinghNo ratings yet
- Renyi EntropyDocument14 pagesRenyi EntropyDetaiACNo ratings yet
- Maxent Models and Discriminative Estimation: The Maximum Entropy Model PresentationDocument39 pagesMaxent Models and Discriminative Estimation: The Maximum Entropy Model PresentationSantosh Kumar BhartiNo ratings yet
- L19-20 ColorImageProcessingDocument72 pagesL19-20 ColorImageProcessingBandi SumanthNo ratings yet
- Edge Detection and Hough TransformDocument5 pagesEdge Detection and Hough TransformAnonymous vjHBiIYNo ratings yet
- DC Lecture Slides 1 - Information TheoryDocument22 pagesDC Lecture Slides 1 - Information TheoryG VenkateshNo ratings yet
- Feature Extraction From ImagesDocument54 pagesFeature Extraction From ImagescefwanNo ratings yet
- A Function-Based Image Binarization Based On Histogram: Hamid SheikhveisiDocument9 pagesA Function-Based Image Binarization Based On Histogram: Hamid SheikhveisiSaeideh OraeiNo ratings yet
- 05Document61 pages05Yogesh KatreNo ratings yet
- Lecture1 Intro To DIP - Spatial and Intensity ResolutionDocument22 pagesLecture1 Intro To DIP - Spatial and Intensity ResolutionfuxailNo ratings yet
- MM BSC Solns 2009Document14 pagesMM BSC Solns 2009Asheke ZinabNo ratings yet
- Bayesian NetworksDocument35 pagesBayesian NetworksIrfan HussainNo ratings yet
- Lectures 1 and 2 CEN545Document10 pagesLectures 1 and 2 CEN545Shafayet UddinNo ratings yet
- 15 Wk7 Decision Tree ILPDocument44 pages15 Wk7 Decision Tree ILPB2No ratings yet
- Dip Unit2Document172 pagesDip Unit2Vaishnavi BavalekarNo ratings yet
- Bi-Histogram Equalization With A Plateau Limit-1Document25 pagesBi-Histogram Equalization With A Plateau Limit-1Ayushi TewariNo ratings yet
- Warmup NewDocument56 pagesWarmup NewTuan TranNo ratings yet
- Lecture2 introToBayesDocument22 pagesLecture2 introToBayesAla BalaNo ratings yet
- A Fuzzy Logic Approach To Image SegmentationDocument5 pagesA Fuzzy Logic Approach To Image SegmentationSUVANKAR SAMANTARAYNo ratings yet
- 2 Image Based Fish RecognitionDocument4 pages2 Image Based Fish Recognition-Annette Dizon-No ratings yet
- Lecture 7 - Distance MeasuresDocument38 pagesLecture 7 - Distance MeasuresAgnish SahuNo ratings yet
- Image SegmentationDocument36 pagesImage SegmentationA JNo ratings yet
- Bab 10 Image Processing in JavaDocument19 pagesBab 10 Image Processing in JavaFadlan AprialNo ratings yet
- Week2-Fuzzy Logic and ReasoningDocument48 pagesWeek2-Fuzzy Logic and ReasoningMohamed mohamedNo ratings yet
- Lecture 10 ImageDocument48 pagesLecture 10 ImageSaif MohamedNo ratings yet
- Periocular Based Verification On Legacy Images: AbstractDocument5 pagesPeriocular Based Verification On Legacy Images: AbstractpinkymoonNo ratings yet
- Color Image ProcessingDocument58 pagesColor Image Processingkanike saiprakashNo ratings yet
- Machine Learning Models and TheoriesDocument38 pagesMachine Learning Models and TheoriesAmrita ChaturvediNo ratings yet
- Image Compression Unit 4Document17 pagesImage Compression Unit 4Swethasri Janani (Swethasri)No ratings yet
- BioVision 03 06Document14 pagesBioVision 03 06suyoggupta01No ratings yet
- Chapter 3 - Bien Doi Anh Trong Mien Khong GianDocument38 pagesChapter 3 - Bien Doi Anh Trong Mien Khong GianHải vlogNo ratings yet
- ECE4007 Information Theory and Coding: DR - Sangeetha R.GDocument44 pagesECE4007 Information Theory and Coding: DR - Sangeetha R.GTanmoy DasNo ratings yet
- 13 LinearFactorModelsDocument37 pages13 LinearFactorModelsAleesha K BNo ratings yet
- Sanjaybhai Rajguru College of Engineering - Rajkot: Subject: Fundamentals of Image Processing (2181102)Document23 pagesSanjaybhai Rajguru College of Engineering - Rajkot: Subject: Fundamentals of Image Processing (2181102)rajeshNo ratings yet
- Gonzalez 2020Document79 pagesGonzalez 2020hu jackNo ratings yet
- Image CompressionDocument114 pagesImage CompressionDEVID ROYNo ratings yet
- Basic Concepts of Fuzzy LogicDocument20 pagesBasic Concepts of Fuzzy LogicJiwa AbdullahNo ratings yet
- Clustering Gene Expression Data: CS 838 WWW - Cs.wisc - Edu/ Craven/cs838.html Mark Craven Craven@biostat - Wisc.edu April 2001Document12 pagesClustering Gene Expression Data: CS 838 WWW - Cs.wisc - Edu/ Craven/cs838.html Mark Craven Craven@biostat - Wisc.edu April 2001Fadhili DungaNo ratings yet
- Academic Internship Final ReportDocument11 pagesAcademic Internship Final ReportNilakhya ChawrokNo ratings yet
- Ps 2Document2 pagesPs 2Muskan BuraNo ratings yet
- TE361 Channel Coding 1Document24 pagesTE361 Channel Coding 1Jeffrey MintahNo ratings yet
- ITC Notes 2Document36 pagesITC Notes 2Shanu NizarNo ratings yet
- Analysis of Small Tumours in Ultrasound Breast Echography: AbstractDocument4 pagesAnalysis of Small Tumours in Ultrasound Breast Echography: AbstractDimona MoldovanuNo ratings yet
- BBT 3201 - Introduction To Artificial Intelligence Concepts - November 2019Document3 pagesBBT 3201 - Introduction To Artificial Intelligence Concepts - November 2019Sankaine SanayetNo ratings yet
- Learn Statistics Fast: A Simplified Detailed Version for StudentsFrom EverandLearn Statistics Fast: A Simplified Detailed Version for StudentsNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Tamilmani NagarDocument2 pagesTamilmani NagarDinesh KumarNo ratings yet
- Humoral Immunity Across The SARS-CoV-2 Spike AfterDocument16 pagesHumoral Immunity Across The SARS-CoV-2 Spike AfterDinesh KumarNo ratings yet
- Module-2 ML PartDocument124 pagesModule-2 ML PartDinesh KumarNo ratings yet
- OCN Worksheet I-V UnitDocument18 pagesOCN Worksheet I-V UnitDinesh KumarNo ratings yet
- Chebyshev PDFDocument4 pagesChebyshev PDFDinesh KumarNo ratings yet
- Mutual Information, Joint Entropy & Conditional EntropyDocument13 pagesMutual Information, Joint Entropy & Conditional EntropyDinesh KumarNo ratings yet
- Prospective vs. Retrospective Delay Analysis: Rohit Singhal, Shishir Kant & Adarsh KumarDocument10 pagesProspective vs. Retrospective Delay Analysis: Rohit Singhal, Shishir Kant & Adarsh KumarKevin DonNo ratings yet
- DrupalDocument344 pagesDrupalMike Nall100% (4)
- Delcam - PowerINSPECT 2017 WhatsNew CNC RU - 2016Document40 pagesDelcam - PowerINSPECT 2017 WhatsNew CNC RU - 2016phạm minh hùngNo ratings yet
- Management Theories-1Document5 pagesManagement Theories-1veera kaurNo ratings yet
- CPA-Financial ReportingDocument158 pagesCPA-Financial Reportingjbah saimon baptisteNo ratings yet
- Carbohydrates Discussion Questions and AnswersDocument2 pagesCarbohydrates Discussion Questions and AnswerslolstudentNo ratings yet
- AHF Thesis - CorrectedDocument146 pagesAHF Thesis - CorrectedAlasdair FikourasNo ratings yet
- Polarized Light MicrosDocument59 pagesPolarized Light MicrosAnonymous Ukn4LwNo ratings yet
- Business ApplicationsDocument19 pagesBusiness ApplicationsAdair VinNo ratings yet
- M4164-C 06-15 - Etrinsa Technical Manual - MN031r2hq PDFDocument142 pagesM4164-C 06-15 - Etrinsa Technical Manual - MN031r2hq PDFMaria Lavinia IordacheNo ratings yet
- Amanpulo FactsheetDocument6 pagesAmanpulo FactsheetAlexNo ratings yet
- Chapter VDocument44 pagesChapter VvenkidivNo ratings yet
- A Circle of DistortionDocument20 pagesA Circle of DistortionfinityNo ratings yet
- AI Business IdeasDocument12 pagesAI Business IdeasYasir ButtNo ratings yet
- English Holiday HomeworkDocument18 pagesEnglish Holiday Homeworkzainab.syed017No ratings yet
- Valuecent Profile PDFDocument9 pagesValuecent Profile PDFAP Advisory BVNo ratings yet
- DR - Nitish Kumar - CV ..Document6 pagesDR - Nitish Kumar - CV ..ABHISHEK SINGHNo ratings yet
- 16 Karlekar Purva DTSP Assi 3Document14 pages16 Karlekar Purva DTSP Assi 3Purva100% (1)
- Phrasal Verb LESSON FINAL 1701874327225Document67 pagesPhrasal Verb LESSON FINAL 1701874327225bgt dfgNo ratings yet
- Geocortex Essentials 4.4 Product Guide - For Web - 20150910 PDFDocument45 pagesGeocortex Essentials 4.4 Product Guide - For Web - 20150910 PDFVasile CiurilescuNo ratings yet
- Illinois State Board of Education: General InformationDocument40 pagesIllinois State Board of Education: General InformationLeslie AtkinsonNo ratings yet
- TrashDocument106 pagesTrashMakBuckNo ratings yet
- Research Lifecycle DiagramDocument1 pageResearch Lifecycle DiagramAlexandre Caixeta UmbertiNo ratings yet
- Hendricks, David W - Fundamentals of Water Treatment Unit Processes - Physical, Chemical, and Biological-CRC Press (2011)Document930 pagesHendricks, David W - Fundamentals of Water Treatment Unit Processes - Physical, Chemical, and Biological-CRC Press (2011)Héctor RomeroNo ratings yet
- Time Value of Money: Compound InterestDocument28 pagesTime Value of Money: Compound InterestkateNo ratings yet
- Configuring Resilient Ethernet Protocol: Information About Configuring REPDocument12 pagesConfiguring Resilient Ethernet Protocol: Information About Configuring REPGabi Si Florin JalencuNo ratings yet
- Graphic Organizer 2Document4 pagesGraphic Organizer 2Amexis2No ratings yet
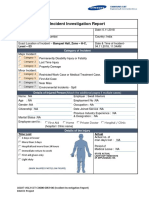
- Incident Investigation Report - Fire Incedent - 04-11-2018 Swati InteriorsDocument4 pagesIncident Investigation Report - Fire Incedent - 04-11-2018 Swati InteriorsMobin Thomas AbrahamNo ratings yet
- Lock Out-Tag OutDocument40 pagesLock Out-Tag OutMurali DharNo ratings yet