Download as ppt, pdf, or txt
You might also like
- Harvard Economics 2020a Problem Set 4Document4 pagesHarvard Economics 2020a Problem Set 4J100% (1)
- G.K.mcmillan - IsA - Good Tuning PID (A Pocket Guide)Document120 pagesG.K.mcmillan - IsA - Good Tuning PID (A Pocket Guide)KALATUSNo ratings yet
- Emergency Department Handbook PDFDocument461 pagesEmergency Department Handbook PDFdmallozziNo ratings yet
- The Eyes of The Skin - Opinion Piece.Document2 pagesThe Eyes of The Skin - Opinion Piece.Disha RameshNo ratings yet
- Ford Think Owners ManualDocument118 pagesFord Think Owners ManualDennis Jason Anti100% (5)
- Frequency Domain Design LimitationsDocument81 pagesFrequency Domain Design LimitationsLin ChongNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument20 pagesElec Eng 4Cl4:: Control System DesignMorteza SepehranNo ratings yet
- Introduction To The Principles of Feedback: Topics To Be Covered IncludeDocument40 pagesIntroduction To The Principles of Feedback: Topics To Be Covered IncludeAliNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument12 pagesElec Eng 4Cl4:: Control System DesignMorteza SepehranNo ratings yet
- Ch22cDesign Via Optimal ControlDocument230 pagesCh22cDesign Via Optimal ControlDulecha Adane DulechaNo ratings yet
- Chapter 18Document75 pagesChapter 18Lin ChongNo ratings yet
- Introduction To The Principles of FeedbackDocument40 pagesIntroduction To The Principles of FeedbackMichael PunongbayanNo ratings yet
- Classical PID ControllerDocument62 pagesClassical PID ControllerAslama IsnaeniNo ratings yet
- Control Design Based On OptimizationDocument93 pagesControl Design Based On OptimizationLin ChongNo ratings yet
- Controller Tuning: A Motivational ExampleDocument65 pagesController Tuning: A Motivational ExamplealiNo ratings yet
- Chapter 12 PID Control Design and Tuning BDocument35 pagesChapter 12 PID Control Design and Tuning BZay Nthuu Coco ShabrinaNo ratings yet
- EE4CL4 Lecture14 PDFDocument20 pagesEE4CL4 Lecture14 PDFramjiNo ratings yet
- Controller Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID ControllersDocument66 pagesController Design (Based On Transient Response Criteria: To Determine Controller Settings For P, PI or PID Controllerssatya sagarNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument46 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- NC Machining Technique10Document68 pagesNC Machining Technique10Dark ShadowNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response CriteriaDEVI RAJENDRANNo ratings yet
- 19bic040 PC Exp-7Document9 pages19bic040 PC Exp-7Drumil PatelNo ratings yet
- PID Controller Design, Tuning and TroubleshootingDocument19 pagesPID Controller Design, Tuning and TroubleshootingAmy MillerNo ratings yet
- ENG267 Control Systems and Process Dynamics: Assignment For Topic 10 Due Monday 13:30 - 28oct2011Document2 pagesENG267 Control Systems and Process Dynamics: Assignment For Topic 10 Due Monday 13:30 - 28oct2011othmanNo ratings yet
- Ca Intermediate Group 2 May 23 Financial ManagementDocument13 pagesCa Intermediate Group 2 May 23 Financial ManagementAnshuman GuptaNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response CriteriaVijay RajaindranNo ratings yet
- Make It Easier For Other People To Find Your Content by Providing More Information About It.Document45 pagesMake It Easier For Other People To Find Your Content by Providing More Information About It.Osy OsyNo ratings yet
- Control SystemDocument142 pagesControl Systemjohn cenaNo ratings yet
- Process Control Seborg LectureDocument58 pagesProcess Control Seborg LectureTanvir AhmedNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument20 pagesElec Eng 4Cl4:: Control System DesignरजतयदुवंशीNo ratings yet
- Pid Controller Design and TuningDocument33 pagesPid Controller Design and TuningfaqihNo ratings yet
- Chapter 22 Solution Manual Kieso IFRS byDocument60 pagesChapter 22 Solution Manual Kieso IFRS byAquarius PlanetNo ratings yet
- An Overview of The Verilog HDLDocument25 pagesAn Overview of The Verilog HDLComedy Hindi HDNo ratings yet
- 2.3.4 Design Values of Actions: BS EN 1990: A1.2.2 & NaDocument3 pages2.3.4 Design Values of Actions: BS EN 1990: A1.2.2 & NaSrini VasanNo ratings yet
- EEL 2216 Control Theory: Chapter 6: Compensation TechniquesDocument5 pagesEEL 2216 Control Theory: Chapter 6: Compensation TechniquesBarani TharanNo ratings yet
- STATS 330 Model Answers For Final Exam 2006, Part BDocument3 pagesSTATS 330 Model Answers For Final Exam 2006, Part BPETERNo ratings yet
- Model Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentDocument44 pagesModel Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentAayush PatidarNo ratings yet
- CPM HandoutsDocument2 pagesCPM HandoutsPaolo LibradaNo ratings yet
- Digital Control System Lecture - 3Document25 pagesDigital Control System Lecture - 3tadepeace23No ratings yet
- GDL 10 Series Gas Diffusion Layer: SigracetDocument2 pagesGDL 10 Series Gas Diffusion Layer: SigracetAhmed Emad AhmedNo ratings yet
- Skogestad PDFDocument19 pagesSkogestad PDFRajendra100% (1)
- Chapter 12Document58 pagesChapter 12Nigel KowNo ratings yet
- 03 Wind LoadsSSSDocument4 pages03 Wind LoadsSSSAnna TanoNo ratings yet
- Lecture 36 - Single Stage Amplifier: Design For Specific GainDocument11 pagesLecture 36 - Single Stage Amplifier: Design For Specific GainKhaleef Khairul AnuarNo ratings yet
- SICE-ICASE International Joint Conference 2006Document6 pagesSICE-ICASE International Joint Conference 2006ShamsMohdNo ratings yet
- Alternative Control MethodsDocument10 pagesAlternative Control MethodscoverttunaNo ratings yet
- NISE - Control Systems Engineering 6 Ed-Páginas-502-506Document5 pagesNISE - Control Systems Engineering 6 Ed-Páginas-502-506Marcelo Silvestre FilhoNo ratings yet
- The Application of Nonlinear PID Controller in Generator Excitation SystemDocument6 pagesThe Application of Nonlinear PID Controller in Generator Excitation SystemNor Rochmad Hadi PNo ratings yet
- OnoffDocument44 pagesOnoffscualoboy2010No ratings yet
- DTC B0103/12 Short in D Squib Circuit (To B+)Document4 pagesDTC B0103/12 Short in D Squib Circuit (To B+)carlos Gutierrez De La HozNo ratings yet
- Crashing Lecture 06 Additional InformationDocument32 pagesCrashing Lecture 06 Additional InformationRonnieNo ratings yet
- EECE460 DecouplingDocument28 pagesEECE460 DecouplingKelly SmithNo ratings yet
- CHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myDocument65 pagesCHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myhakita86No ratings yet
- Module 5: Design of Sampled Data Control Systems: Lecture Note 8Document8 pagesModule 5: Design of Sampled Data Control Systems: Lecture Note 8Aryan RajNo ratings yet
- Comments To FprEN1991 1-3-2023 Multi Span RoofDocument11 pagesComments To FprEN1991 1-3-2023 Multi Span RoofcarlodoimoNo ratings yet
- EE4CL4 Lecture31 PDFDocument16 pagesEE4CL4 Lecture31 PDFMorteza SepehranNo ratings yet
- l6 PDFDocument11 pagesl6 PDFdanielNo ratings yet
- Zhang 2017Document6 pagesZhang 2017Metal ArtNo ratings yet
- Vilanova - Pid Tuning For Cascade Control System DesignDocument4 pagesVilanova - Pid Tuning For Cascade Control System DesignCarlos BellatinNo ratings yet
- How To Calculate Deformations in Timber Structures Using Eurocode 1Document8 pagesHow To Calculate Deformations in Timber Structures Using Eurocode 1dhanya1995No ratings yet
- Design of Gas-Liquid Separator For Complete Degasing: Tamagna Uki, Subhash T. Sarda, and Thomas MathewDocument4 pagesDesign of Gas-Liquid Separator For Complete Degasing: Tamagna Uki, Subhash T. Sarda, and Thomas Mathewmr. dossNo ratings yet
- High-Performance Gradient Elution: The Practical Application of the Linear-Solvent-Strength ModelFrom EverandHigh-Performance Gradient Elution: The Practical Application of the Linear-Solvent-Strength ModelNo ratings yet
- Protection Motor TutorialDocument35 pagesProtection Motor TutorialnoogeyNo ratings yet
- Protection Motor TutorialDocument35 pagesProtection Motor Tutorialahmadshoeb19No ratings yet
- Objectives Objectives: "There's Fungus Among Us" "There's Fungus Among Us" 2008 2008Document9 pagesObjectives Objectives: "There's Fungus Among Us" "There's Fungus Among Us" 2008 2008krismcd03No ratings yet
- Electric Charges and FieldsDocument50 pagesElectric Charges and Fieldskapil100% (2)
- AC MotorDocument22 pagesAC MotorMoise CristinaNo ratings yet
- Inverter Mitsubishi - Practical CourseDocument217 pagesInverter Mitsubishi - Practical Coursealbeerto86% (7)
- Flexible Ac Transmission System (Facts) : ST - Ann'S College of Engineering&Technology ChiralaDocument11 pagesFlexible Ac Transmission System (Facts) : ST - Ann'S College of Engineering&Technology Chiralaranga247No ratings yet
- PS IiDocument20 pagesPS Iiranga247100% (2)
- Inverter Mitsubishi - Beginner CourseDocument73 pagesInverter Mitsubishi - Beginner Coursealbeerto100% (6)
- Variable Speed DrivesDocument41 pagesVariable Speed DrivesJuan AraqueNo ratings yet
- Basics Ele 01Document489 pagesBasics Ele 01Lin ChongNo ratings yet
- Ac & DC Motor ControllDocument91 pagesAc & DC Motor ControllVidyesh CtNo ratings yet
- Fast Fourier Transform Made EasyDocument40 pagesFast Fourier Transform Made EasyFlorentin Christian100% (1)
- Single Phase Power Factor Correction Circuit With Wide Output Voltage RangeDocument110 pagesSingle Phase Power Factor Correction Circuit With Wide Output Voltage RangeBritto TigerNo ratings yet
- AC Drives Control ABBDocument316 pagesAC Drives Control ABBbryan_robinsonuscNo ratings yet
- A Tutorial On Visual Servo ControlDocument42 pagesA Tutorial On Visual Servo ControlshivnairNo ratings yet
- Manual PDFDocument442 pagesManual PDFJavier Ruiz Thorrens100% (1)
- Testing of Digital SystemsDocument1,018 pagesTesting of Digital SystemsLouis Bertol100% (1)
- Single-Phase AC Circuits: Version 2 EE IIT, Kharagpur 1Document15 pagesSingle-Phase AC Circuits: Version 2 EE IIT, Kharagpur 1Juan Manuel Martinez SanchezNo ratings yet
- The Language of Legal DocumentsDocument15 pagesThe Language of Legal DocumentsAldo CokaNo ratings yet
- Gfps 9182 Product Range PVC U en PDFDocument568 pagesGfps 9182 Product Range PVC U en PDFjj bagzNo ratings yet
- Arturo Salinas: About MeDocument3 pagesArturo Salinas: About MepcpericoNo ratings yet
- DEEDofContribution - Individual AntonDocument4 pagesDEEDofContribution - Individual AntonLorelie YabutNo ratings yet
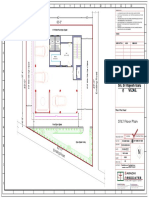
- Final Stilt Floor Plan 16042022Document1 pageFinal Stilt Floor Plan 16042022rajesh lankaNo ratings yet
- Formula Sheet Pre-MidDocument4 pagesFormula Sheet Pre-MidUzair KhanNo ratings yet
- Skill Development Sector - Achievement ReportDocument10 pagesSkill Development Sector - Achievement ReportShivangi AgrawalNo ratings yet
- A Partial Adjusted Trial Balance Follows For Nolet LTD atDocument2 pagesA Partial Adjusted Trial Balance Follows For Nolet LTD atMiroslav GegoskiNo ratings yet
- SLES. ESP - Intervention of Learning Resources K 12 2020Document33 pagesSLES. ESP - Intervention of Learning Resources K 12 2020Catherinei BorilloNo ratings yet
- JEE 2024 RoadmapDocument42 pagesJEE 2024 Roadmaplilop27557No ratings yet
- Badminton Is A Court or Lawn Game Played With Lightweight Racketsand AshuttlecockDocument14 pagesBadminton Is A Court or Lawn Game Played With Lightweight Racketsand Ashuttlecocktaehyung trash100% (1)
- GA Weather Decision-Making Dec05 PDFDocument36 pagesGA Weather Decision-Making Dec05 PDFPete AndreNo ratings yet
- Safety, Efficacy, and Mechanisms of Action of Cannabinoids in Neurological Disorders.Document9 pagesSafety, Efficacy, and Mechanisms of Action of Cannabinoids in Neurological Disorders.Sindy Licette PiñeroNo ratings yet
- Ensemble LearningDocument7 pagesEnsemble LearningJavier Garcia RajoyNo ratings yet
- Lexi BDocument62 pagesLexi BPetruss RonyyNo ratings yet
- Orifice Meter Is Type of Variable Head MeterDocument2 pagesOrifice Meter Is Type of Variable Head MeterMourougapragash SubramanianNo ratings yet
- Avnet TP Sap Arp PL May14Document77 pagesAvnet TP Sap Arp PL May14Kathak DancerNo ratings yet
- Textbook Emergency Echocardiography Second Edition Flachskampf Ebook All Chapter PDFDocument63 pagesTextbook Emergency Echocardiography Second Edition Flachskampf Ebook All Chapter PDFgeraldine.simmons473100% (12)
- Lisa Olle Declaration in SupportDocument5 pagesLisa Olle Declaration in SupportMikey CampbellNo ratings yet
- Download: Mosaic TechniquesDocument2 pagesDownload: Mosaic TechniquesJohnny LaounNo ratings yet
- Ibpm 4Document64 pagesIbpm 4Miguel Angel HernandezNo ratings yet
- Software ReengineeringDocument37 pagesSoftware ReengineeringPasquale Focetola NetoNo ratings yet
- Yanbu: Export Refinery ProjectDocument5 pagesYanbu: Export Refinery ProjectJanakiraman MalligaNo ratings yet
- TRD Vs ASMEDocument1 pageTRD Vs ASMEsirang07100% (1)
- Opti Plex 7080Document38 pagesOpti Plex 7080brayerly143No ratings yet
- CD 5000Document30 pagesCD 5000Robert ParishNo ratings yet
- Math10 SLHT, Q3, WK8, M10SP-IIIg-h-1Document7 pagesMath10 SLHT, Q3, WK8, M10SP-IIIg-h-1Justiniano SalicioNo ratings yet