Download as pptx, pdf, or txt
You might also like
- 2016 OWIKIT CatalogDocument12 pages2016 OWIKIT CatalogOwi DanielNo ratings yet
- 2 2mechanicalsystemsDocument4 pages2 2mechanicalsystemsapi-358875983No ratings yet
- 08 Dynamics-Newton's 2nd LawDocument9 pages08 Dynamics-Newton's 2nd Laweltytan100% (1)
- G Chapter 07 PDFDocument53 pagesG Chapter 07 PDFIjaz TalibNo ratings yet
- Mechanical SpiderDocument35 pagesMechanical SpiderAbhishek BajpaiNo ratings yet
- Bubble MachineDocument16 pagesBubble MachineAgen PertaminiNo ratings yet
- Ramsey BE66 - Blinky Eyes Animated Display PDFDocument16 pagesRamsey BE66 - Blinky Eyes Animated Display PDFAl PetitNo ratings yet
- Simplemechanism 180302020307Document58 pagesSimplemechanism 180302020307Kunal GadgilNo ratings yet
- Cams and Camfollowers LessonDocument38 pagesCams and Camfollowers LessonleannaNo ratings yet
- Less:Adjustments: Daily Food Cost Report April/5/2020Document4 pagesLess:Adjustments: Daily Food Cost Report April/5/2020dinalsam90No ratings yet
- Hydraulics: Hydraulics (from Greek: Υδραυλική) is a technology and applied scienceDocument5 pagesHydraulics: Hydraulics (from Greek: Υδραυλική) is a technology and applied sciencechikaNo ratings yet
- Prehistory Musical RobotsDocument12 pagesPrehistory Musical Robotsrover sakibNo ratings yet
- Theory of Automata Lecture 1Document51 pagesTheory of Automata Lecture 1Razi EjazNo ratings yet
- Ankon Gopal Banik: According To The Syllabus of Department of CSE, Gono BishwabidiyalayDocument28 pagesAnkon Gopal Banik: According To The Syllabus of Department of CSE, Gono BishwabidiyalayAnkon Gopal BanikNo ratings yet
- Axes and Motion StructureDocument30 pagesAxes and Motion StructureBhuban LimbuNo ratings yet
- Famous ArtistsDocument26 pagesFamous ArtistsHannah LohNo ratings yet
- Where No Man Has Gone Before: A History of Apollo Lunar Exploration MissionsDocument562 pagesWhere No Man Has Gone Before: A History of Apollo Lunar Exploration MissionsPeter AylwardNo ratings yet
- LGBTQIA+ Pride Month - ConversationDocument11 pagesLGBTQIA+ Pride Month - ConversationMila CostaNo ratings yet
- Microsoft Research Toy PDFDocument20 pagesMicrosoft Research Toy PDFJonathan LivingstonNo ratings yet
- howThingsWork Sig10 PDFDocument11 pageshowThingsWork Sig10 PDFFederico ZanettiNo ratings yet
- Searching The Horizon A History of Ames Research Center, 1940-1976Document320 pagesSearching The Horizon A History of Ames Research Center, 1940-1976Bob Andrepont100% (1)
- The Antikythera Mechanism and The Early History of The MoonDocument11 pagesThe Antikythera Mechanism and The Early History of The MoonAtlantisPapersNo ratings yet
- ICE Lecture 2ADocument8 pagesICE Lecture 2Afox djietoNo ratings yet
- Kinematic BasicDocument138 pagesKinematic BasicIshank Singh SandhuNo ratings yet
- Chapter 1 MechanismDocument82 pagesChapter 1 MechanismMohsan AbbasNo ratings yet
- ME-309: Mechanics of Machines Spring 2011/2012: Instructor: Office: E-Mail: Catalogue Description: (3-0-3)Document14 pagesME-309: Mechanics of Machines Spring 2011/2012: Instructor: Office: E-Mail: Catalogue Description: (3-0-3)Diala DurubiNo ratings yet
- Chapter # 1: Introduction To Robotics Mechanics & ControlDocument51 pagesChapter # 1: Introduction To Robotics Mechanics & ControlAli AliNo ratings yet
- Robotics IntroductionDocument22 pagesRobotics IntroductionPrashanth BnNo ratings yet
- Mach L 1Document34 pagesMach L 1abdul bariNo ratings yet
- Unit 1 - IntroductionDocument33 pagesUnit 1 - IntroductionRavi KantNo ratings yet
- KMDocument120 pagesKMsady1967No ratings yet
- ME1 ReviewerDocument418 pagesME1 ReviewerJinno Angelo GuardayaNo ratings yet
- RoboticsDocument8 pagesRoboticsraminenieNo ratings yet
- ME8492 Kinematics of Machinery 03 - by LearnEngineering - inDocument76 pagesME8492 Kinematics of Machinery 03 - by LearnEngineering - inPrasanna SekarNo ratings yet
- Drone 2Document46 pagesDrone 2Abdullah AL NomanNo ratings yet
- Trade 3 PDFDocument6 pagesTrade 3 PDFRajveer Singh SachdevNo ratings yet
- Lec 1Document39 pagesLec 1Saad RafiqueNo ratings yet
- RoboticsDocument18 pagesRoboticslakshmigsr6610100% (1)
- Dani Mechanism CHAPTER 1Document36 pagesDani Mechanism CHAPTER 1daniel hambissaNo ratings yet
- 01 CHAPTER 1 IntroductionDocument17 pages01 CHAPTER 1 IntroductionJerome XaviorNo ratings yet
- Topic 1 CartesianDocument8 pagesTopic 1 CartesianAwais khalidNo ratings yet
- Mechanism Lab ReportDocument26 pagesMechanism Lab Reporta.rahman.kamran.2002No ratings yet
- Me6401 KomDocument128 pagesMe6401 KomThomas LafontaineNo ratings yet
- Automation & Robotics (RME078) : Lecture Notes OnDocument10 pagesAutomation & Robotics (RME078) : Lecture Notes Onمقدس ألم Μυφυαδδας ΑιαΜNo ratings yet
- Serial and Parallel Robot Manipulators Kinematics Dynamics Control and Optimization PDFDocument468 pagesSerial and Parallel Robot Manipulators Kinematics Dynamics Control and Optimization PDFCosorAndrei-AlexandruNo ratings yet
- Chapter-8 RoboticsDocument22 pagesChapter-8 RoboticsschrienerNo ratings yet
- AC DrivesDocument120 pagesAC DrivesVenkata GanesanNo ratings yet
- Kom Lecture NotesDocument163 pagesKom Lecture NotesgvnagamaniNo ratings yet
- Bbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesDocument41 pagesBbbbuniversity Questions Bank: Pr8451-Mechanics of MachinesThi KumarNo ratings yet
- Mechatronics & Timing BeltsDocument54 pagesMechatronics & Timing BeltsBien Morfe100% (1)
- The Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Document14 pagesThe Personal Quadrotor Project Brief State Report: Jaromir Dvorak (Dvoraj13@fel - Cvut.cz) Horn I Cerekev, October 17, 2010Hashem Mohamed HashemNo ratings yet
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocument9 pagesPreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentNo ratings yet
- Mechatronics & Mcroprocessors: Lecture Notes Unit I by Dr. Nataraja M MDocument23 pagesMechatronics & Mcroprocessors: Lecture Notes Unit I by Dr. Nataraja M Machunala rNo ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- Theory of Machines-Lecture 1Document31 pagesTheory of Machines-Lecture 1Mohammed Al-OdatNo ratings yet
- Robotics Chapter 1Document11 pagesRobotics Chapter 1origafelixNo ratings yet
- Drone Simulation and Control Usin Matlab and SimulinkDocument31 pagesDrone Simulation and Control Usin Matlab and Simulinkabenezer zegeyeNo ratings yet
- Robotics 01Document45 pagesRobotics 0133majeesamir66No ratings yet
- Lecture 2-2: Robotics Robotics and and Automation AutomationDocument8 pagesLecture 2-2: Robotics Robotics and and Automation Automationharikiran3285No ratings yet
- Mechanics of Machine: Instructor 2k18 SessionDocument43 pagesMechanics of Machine: Instructor 2k18 Sessionaliyan hassanNo ratings yet
- Advanced Theory of Constraint and Motion Analysis for Robot MechanismsFrom EverandAdvanced Theory of Constraint and Motion Analysis for Robot MechanismsNo ratings yet
- Ball Joint Rubber BootDocument10 pagesBall Joint Rubber BootDan WolfNo ratings yet
- Aerospace Structural Dynamics - AE31002 Tutorial Sheet - 4: M M X X K K X XDocument1 pageAerospace Structural Dynamics - AE31002 Tutorial Sheet - 4: M M X X K K X XPranav TejaNo ratings yet
- FootingDocument44 pagesFootingMd. Moshiur RahmanNo ratings yet
- bbcdc400b7bf09431818100d1a8b9fd4Document25 pagesbbcdc400b7bf09431818100d1a8b9fd4PrashantNo ratings yet
- Cenmeccdb Activity 06 - Gulifardo Ezekiel A.Document6 pagesCenmeccdb Activity 06 - Gulifardo Ezekiel A.EzeKiel GulifardoNo ratings yet
- List of Moments of Inertia PDFDocument3 pagesList of Moments of Inertia PDFktsnl100% (1)
- The Stirling Engine Mechanism Optimization - 2016 - Perspectives in ScienceDocument6 pagesThe Stirling Engine Mechanism Optimization - 2016 - Perspectives in ScienceAinie ButtNo ratings yet
- Microcracking and Stress-Strain Curves For Concrete in TensionDocument4 pagesMicrocracking and Stress-Strain Curves For Concrete in TensionjayanthNo ratings yet
- A Theoretical Model For Axial Heat Conduction Effects During Single-Phase Flow in MicrochannelsDocument6 pagesA Theoretical Model For Axial Heat Conduction Effects During Single-Phase Flow in MicrochannelsSaad Bin NazarudeenNo ratings yet
- Dielectrics An Atomic ViewDocument15 pagesDielectrics An Atomic ViewEngr Danyal Zahid100% (2)
- Work Done by An Expanding GasDocument11 pagesWork Done by An Expanding Gasstreetrat133No ratings yet
- E101Document4 pagesE101Jeff CruzNo ratings yet
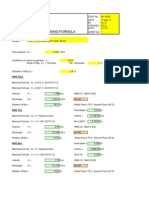
- Flow in Pipe - Manning FormulaDocument1 pageFlow in Pipe - Manning FormulaBahtiar YudhistiraNo ratings yet
- Static Analysis of Orifice Plate For Different Geometries: AbstractDocument5 pagesStatic Analysis of Orifice Plate For Different Geometries: AbstractgeorgenzNo ratings yet
- Coupled PendulumDocument5 pagesCoupled PendulumSubhasis PandaNo ratings yet
- Lecture Notes Classical MechanicsDocument453 pagesLecture Notes Classical MechanicssuudfiinNo ratings yet
- Sheet 1 DesignDocument2 pagesSheet 1 DesignAmmar ElSheikhNo ratings yet
- Ch6 Thermal Stress Analysis Sp16Document34 pagesCh6 Thermal Stress Analysis Sp16Haidar YafieNo ratings yet
- 13 - ElectrostaticsDocument8 pages13 - Electrostaticsp_k_soni_iit_physics78% (9)
- Potentials of A Numerical Tool For The Simulation of Flow in External Gear MachinesDocument17 pagesPotentials of A Numerical Tool For The Simulation of Flow in External Gear Machines김동하No ratings yet
- Chapter 09Document78 pagesChapter 09ArthurNo ratings yet
- Nust Computer Science Sample Paper 02Document15 pagesNust Computer Science Sample Paper 02aaNo ratings yet
- Phy 1Document50 pagesPhy 1Garlapati Srinivasa Rao100% (1)
- Futura: Engineering InternshipDocument7 pagesFutura: Engineering InternshipDoinkyNo ratings yet
- The Universe in A Nutshell - A Reflective EssayDocument2 pagesThe Universe in A Nutshell - A Reflective EssayAndy Jun Sanchez-BautistaNo ratings yet
- Bridge Mechanics 5Document40 pagesBridge Mechanics 5cipele12No ratings yet
- Electrical Analogy For Flow Below Wier: Experiment No: 4 DATEDocument2 pagesElectrical Analogy For Flow Below Wier: Experiment No: 4 DATEKruti JoshiNo ratings yet
- Cse I Basic Electrical Engg. (10ele 15) NotesDocument196 pagesCse I Basic Electrical Engg. (10ele 15) NotesmanjunathNo ratings yet