
Space Segment & Satellite Link Design
Space Segment & Satellite Link Design
You might also like
- Unit 1-Satellite CommunicationDocument100 pagesUnit 1-Satellite CommunicationvenugopalNo ratings yet
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- Railway Track Crack Detection System Using ArduinoDocument77 pagesRailway Track Crack Detection System Using ArduinoHammad Mughal100% (1)
- III. Space SegmentDocument45 pagesIII. Space SegmentSai Teja100% (3)
- MOSFET-Internal Capacitances PDFDocument11 pagesMOSFET-Internal Capacitances PDFJayanth Sriranga100% (1)
- UNIT 3 (EMI) Part 1Document25 pagesUNIT 3 (EMI) Part 1ShivaniNo ratings yet
- AWP Question BankDocument12 pagesAWP Question BankSuresh KumarNo ratings yet
- Antenna 2marksDocument30 pagesAntenna 2markssushmetha123No ratings yet
- Types of NON-COCHANNEL INTERFERENCEDocument1 pageTypes of NON-COCHANNEL INTERFERENCEroyfadliNo ratings yet
- Unit 2 (Emi)Document16 pagesUnit 2 (Emi)ShivaniNo ratings yet
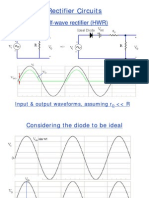
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- EDC Lab ManuelDocument73 pagesEDC Lab ManuelRuban Ponraj100% (1)
- Sattelite Communications PDFDocument166 pagesSattelite Communications PDFAzad AbdheenNo ratings yet
- Important Questions Transmission Lines and WaveguidesDocument1 pageImportant Questions Transmission Lines and WaveguideskskumargieNo ratings yet
- Satellite Communication Unit 4Document16 pagesSatellite Communication Unit 4deepthiNo ratings yet
- DC Material PDFDocument149 pagesDC Material PDFCHARANNo ratings yet
- Power AmplifiersDocument51 pagesPower AmplifiersRiyaz Khan PathanNo ratings yet
- Eca Chapter Wise QuestionsDocument7 pagesEca Chapter Wise QuestionsDinesh PalavalasaNo ratings yet
- Ec8452 Ec-Ii Unit-3Document69 pagesEc8452 Ec-Ii Unit-3Ananda Sailesh K100% (1)
- Syllabus Ec6503-Transmission Lines and Wave GuidesDocument1 pageSyllabus Ec6503-Transmission Lines and Wave GuidesSurendhar SNo ratings yet
- Ec8452 Ec-Ii Unit-1Document122 pagesEc8452 Ec-Ii Unit-1Ananda Sailesh KNo ratings yet
- EC6503-Transmission Lines and WaveguidesDocument15 pagesEC6503-Transmission Lines and WaveguidesAnonymous lt2LFZH100% (1)
- Transmission Lines and WaveguidesDocument1 pageTransmission Lines and WaveguidesVinayNo ratings yet
- Control Systems Interview QuestionsDocument2 pagesControl Systems Interview QuestionsHariom GuptaNo ratings yet
- Microwave Engineering PDFDocument93 pagesMicrowave Engineering PDFbhanumanu0% (1)
- Channel Assignment Strategies, Handoff Strategies Improvement inDocument37 pagesChannel Assignment Strategies, Handoff Strategies Improvement inHarpuneet SinghNo ratings yet
- Transistor Frequency Response and Miller EffectDocument35 pagesTransistor Frequency Response and Miller Effectjamesearl_cubillas100% (1)
- Adaptive Signal ProcessingDocument24 pagesAdaptive Signal Processinganilshaw27No ratings yet
- Signals and Systems: BooksDocument1 pageSignals and Systems: Booksfaizan bariNo ratings yet
- Source Transformation and Super Position Theorem PDFDocument13 pagesSource Transformation and Super Position Theorem PDFVasu RamNo ratings yet
- EC2353 Antenna and Wave Propagation May-June 2012Document2 pagesEC2353 Antenna and Wave Propagation May-June 2012sharonfranklinNo ratings yet
- Qca Project PPTDocument20 pagesQca Project PPTPandu KNo ratings yet
- EC II Unit 3Document33 pagesEC II Unit 3Thiyagarajan VelayuthamNo ratings yet
- Microwave Devices and Systems: Introduction To Microwave EngineeringDocument58 pagesMicrowave Devices and Systems: Introduction To Microwave EngineeringTolera GudisaNo ratings yet
- Notes On Network Analysis (Based On R19 Regulation) - by Shaik Gouse BashaDocument255 pagesNotes On Network Analysis (Based On R19 Regulation) - by Shaik Gouse BashaShaik Gouse Basha100% (1)
- Unit 5 - MICROWAVE DESIGNDocument181 pagesUnit 5 - MICROWAVE DESIGNVanitha RNo ratings yet
- Circuit Theory (Eceg-1081) : Addis Ababa University Addis Ababa Institute of Technology (Aait)Document27 pagesCircuit Theory (Eceg-1081) : Addis Ababa University Addis Ababa Institute of Technology (Aait)AbcdNo ratings yet
- Cyclotron Angular Frequency, Problems On Magnetron: Microwave Crossed-Field Tubes: 03/12/2020 & 10:00 AM-11:00 AMDocument18 pagesCyclotron Angular Frequency, Problems On Magnetron: Microwave Crossed-Field Tubes: 03/12/2020 & 10:00 AM-11:00 AMravi kiranNo ratings yet
- Mems Lecture PlanDocument2 pagesMems Lecture PlanMahesh Kumar K BNo ratings yet
- Satellite Communication: Semester 08Document24 pagesSatellite Communication: Semester 08veluNo ratings yet
- Ece VI Digital Communication 10ec61 NotesDocument252 pagesEce VI Digital Communication 10ec61 NotesNiharika Korukonda100% (1)
- LIC EEE-Multiple Choice Questions 2017Document11 pagesLIC EEE-Multiple Choice Questions 2017jagan40% (5)
- Lecture 7 (Channel Models For Mmwave MIMO System)Document65 pagesLecture 7 (Channel Models For Mmwave MIMO System)Kushagra PratapNo ratings yet
- Navigational Aids & Radar (TC) Lab Manual 2010Document45 pagesNavigational Aids & Radar (TC) Lab Manual 2010Saurabh Patel100% (1)
- LICA Lecture Notes by A.mounikaDocument77 pagesLICA Lecture Notes by A.mounikaAnonymous 4u5XkWGONo ratings yet
- VLSI Objective Questions and Answers 1Document7 pagesVLSI Objective Questions and Answers 1avinashrai92% (12)
- Ec2042 2 MarksDocument56 pagesEc2042 2 Marksanand_duraiswamyNo ratings yet
- Ebers Moll Model PPT Compatibility ModeDocument15 pagesEbers Moll Model PPT Compatibility Moderadsrad100% (1)
- MCQ Digital Electronics - 1Document38 pagesMCQ Digital Electronics - 1avpatil333No ratings yet
- Question Bank: Site&q WirelessDocument4 pagesQuestion Bank: Site&q WirelessSanjana AkkoleNo ratings yet
- Operational Amplifier (Op-Amp)Document26 pagesOperational Amplifier (Op-Amp)Md ArifNo ratings yet
- Assignment 3 - Radio Wave PropagationDocument1 pageAssignment 3 - Radio Wave PropagationKisangiri MichaelNo ratings yet
- Unit 5 - Embedded SystemDocument58 pagesUnit 5 - Embedded Systemsujith100% (1)
- Antennas & Wave Propagation: B.Tech (Iii Year - I Sem)Document144 pagesAntennas & Wave Propagation: B.Tech (Iii Year - I Sem)Jayant Kumar AryaNo ratings yet
- Super Position and Maximum Power Transfer TheoremDocument70 pagesSuper Position and Maximum Power Transfer TheoremKasani Tirumala tejaNo ratings yet
- Digital Communication Line Codes PDFDocument7 pagesDigital Communication Line Codes PDFAzImmNo ratings yet
- Space SegmentDocument27 pagesSpace SegmentRameezNo ratings yet
- Satellite CommunicationDocument23 pagesSatellite CommunicationPrakash Velayudham VNo ratings yet
- Unit 2Document18 pagesUnit 2Anuja AnuNo ratings yet
- Attitude and Orbit ControlDocument28 pagesAttitude and Orbit ControlRaja PirianNo ratings yet
- ET PBL 1Document16 pagesET PBL 1Sumit JhaNo ratings yet
- A Solution To Remote Detection of Illegal Electricity Usage Via Power Line CommunicationDocument10 pagesA Solution To Remote Detection of Illegal Electricity Usage Via Power Line CommunicationSimon BrandlNo ratings yet
- Galaxy Owners Manual Dx77hmlDocument10 pagesGalaxy Owners Manual Dx77hmlbellscbNo ratings yet
- CCTV Security SystemDocument75 pagesCCTV Security Systemasok100% (1)
- Project Lamp Light Part 4Document124 pagesProject Lamp Light Part 4Paul Kent Polter100% (1)
- Chap10 Phase Locked LoopsDocument26 pagesChap10 Phase Locked LoopsAlaa TobasiNo ratings yet
- TV Repeater's Repeater: Boulder Amateur Television ClubDocument12 pagesTV Repeater's Repeater: Boulder Amateur Television ClubBenjamin DoverNo ratings yet
- SRSP 521 DTTDocument23 pagesSRSP 521 DTTHayat BokkhariNo ratings yet
- Overview DIP5K/EN OS/A22 DIP 5000Document8 pagesOverview DIP5K/EN OS/A22 DIP 5000honeyNo ratings yet
- Generation of Non-Standard CTCSS Tones: Application NoteDocument8 pagesGeneration of Non-Standard CTCSS Tones: Application Noteag1tatorNo ratings yet
- Manual MAK-721 PRODocument23 pagesManual MAK-721 PROamerbach55No ratings yet
- LIAISSON24 MIXBAAL MANUAL (English) YOMN4850-001 - RevE PDFDocument178 pagesLIAISSON24 MIXBAAL MANUAL (English) YOMN4850-001 - RevE PDFJuan Milton GardunoNo ratings yet
- Manual Personal GPS Tracker Logger Xexun TK 102 v2Document17 pagesManual Personal GPS Tracker Logger Xexun TK 102 v2bocaidNo ratings yet
- Ceragon - RF Units PDFDocument3 pagesCeragon - RF Units PDFbaskoroboNo ratings yet
- A Review On Signal GenerationDocument10 pagesA Review On Signal GenerationFarhan FarhanNo ratings yet
- Navedtra 14088Document214 pagesNavedtra 14088gotlove7100% (1)
- Disciplined OscillatorsDocument26 pagesDisciplined OscillatorsALEJANDRO IPATZI100% (1)
- Analog Communications: Course Code:13EC1109 L TPC 4 0 0 3Document3 pagesAnalog Communications: Course Code:13EC1109 L TPC 4 0 0 3NISHCHAY SINGHNo ratings yet
- Om Yz BR Isscc 22Document3 pagesOm Yz BR Isscc 22Ganagadhar CHNo ratings yet
- Radio AdvertisingDocument127 pagesRadio AdvertisingGd_775% (4)
- Digiplex 848 Quick Programming Guide v4 1Document14 pagesDigiplex 848 Quick Programming Guide v4 1AlexNo ratings yet
- Linear Cmos RFDocument191 pagesLinear Cmos RFcx byNo ratings yet
- Free-Space Optical Communications: Vincent W. S. Chan, Fellow, IEEE, Fellow, OSADocument13 pagesFree-Space Optical Communications: Vincent W. S. Chan, Fellow, IEEE, Fellow, OSACeline Dian SitorusNo ratings yet
- VLF Receiver Manual Issue 2Document53 pagesVLF Receiver Manual Issue 2Nitsuga PomeloréNo ratings yet
- Manual Dwyer MS-111 Pressure TransmitterDocument4 pagesManual Dwyer MS-111 Pressure TransmitterSunko MachineryNo ratings yet
- University DepartmentsDocument6 pagesUniversity DepartmentsMadhavkumarNo ratings yet
- Description: Tire and Wheel - Tire Pressure Warning SystemDocument6 pagesDescription: Tire and Wheel - Tire Pressure Warning SystemDaniel MenendezNo ratings yet
- Radio Broadcasting EquipmentDocument6 pagesRadio Broadcasting EquipmentBishIn aMillionNo ratings yet























































































Download as pptx, pdf, or txt
You might also like
- Unit 1-Satellite CommunicationDocument100 pagesUnit 1-Satellite CommunicationvenugopalNo ratings yet
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- Railway Track Crack Detection System Using ArduinoDocument77 pagesRailway Track Crack Detection System Using ArduinoHammad Mughal100% (1)
- III. Space SegmentDocument45 pagesIII. Space SegmentSai Teja100% (3)
- MOSFET-Internal Capacitances PDFDocument11 pagesMOSFET-Internal Capacitances PDFJayanth Sriranga100% (1)
- UNIT 3 (EMI) Part 1Document25 pagesUNIT 3 (EMI) Part 1ShivaniNo ratings yet
- AWP Question BankDocument12 pagesAWP Question BankSuresh KumarNo ratings yet
- Antenna 2marksDocument30 pagesAntenna 2markssushmetha123No ratings yet
- Types of NON-COCHANNEL INTERFERENCEDocument1 pageTypes of NON-COCHANNEL INTERFERENCEroyfadliNo ratings yet
- Unit 2 (Emi)Document16 pagesUnit 2 (Emi)ShivaniNo ratings yet
- Rectifier Circuits: Half-Wave Rectifier (HWR)Document18 pagesRectifier Circuits: Half-Wave Rectifier (HWR)Md ArifNo ratings yet
- EDC Lab ManuelDocument73 pagesEDC Lab ManuelRuban Ponraj100% (1)
- Sattelite Communications PDFDocument166 pagesSattelite Communications PDFAzad AbdheenNo ratings yet
- Important Questions Transmission Lines and WaveguidesDocument1 pageImportant Questions Transmission Lines and WaveguideskskumargieNo ratings yet
- Satellite Communication Unit 4Document16 pagesSatellite Communication Unit 4deepthiNo ratings yet
- DC Material PDFDocument149 pagesDC Material PDFCHARANNo ratings yet
- Power AmplifiersDocument51 pagesPower AmplifiersRiyaz Khan PathanNo ratings yet
- Eca Chapter Wise QuestionsDocument7 pagesEca Chapter Wise QuestionsDinesh PalavalasaNo ratings yet
- Ec8452 Ec-Ii Unit-3Document69 pagesEc8452 Ec-Ii Unit-3Ananda Sailesh K100% (1)
- Syllabus Ec6503-Transmission Lines and Wave GuidesDocument1 pageSyllabus Ec6503-Transmission Lines and Wave GuidesSurendhar SNo ratings yet
- Ec8452 Ec-Ii Unit-1Document122 pagesEc8452 Ec-Ii Unit-1Ananda Sailesh KNo ratings yet
- EC6503-Transmission Lines and WaveguidesDocument15 pagesEC6503-Transmission Lines and WaveguidesAnonymous lt2LFZH100% (1)
- Transmission Lines and WaveguidesDocument1 pageTransmission Lines and WaveguidesVinayNo ratings yet
- Control Systems Interview QuestionsDocument2 pagesControl Systems Interview QuestionsHariom GuptaNo ratings yet
- Microwave Engineering PDFDocument93 pagesMicrowave Engineering PDFbhanumanu0% (1)
- Channel Assignment Strategies, Handoff Strategies Improvement inDocument37 pagesChannel Assignment Strategies, Handoff Strategies Improvement inHarpuneet SinghNo ratings yet
- Transistor Frequency Response and Miller EffectDocument35 pagesTransistor Frequency Response and Miller Effectjamesearl_cubillas100% (1)
- Adaptive Signal ProcessingDocument24 pagesAdaptive Signal Processinganilshaw27No ratings yet
- Signals and Systems: BooksDocument1 pageSignals and Systems: Booksfaizan bariNo ratings yet
- Source Transformation and Super Position Theorem PDFDocument13 pagesSource Transformation and Super Position Theorem PDFVasu RamNo ratings yet
- EC2353 Antenna and Wave Propagation May-June 2012Document2 pagesEC2353 Antenna and Wave Propagation May-June 2012sharonfranklinNo ratings yet
- Qca Project PPTDocument20 pagesQca Project PPTPandu KNo ratings yet
- EC II Unit 3Document33 pagesEC II Unit 3Thiyagarajan VelayuthamNo ratings yet
- Microwave Devices and Systems: Introduction To Microwave EngineeringDocument58 pagesMicrowave Devices and Systems: Introduction To Microwave EngineeringTolera GudisaNo ratings yet
- Notes On Network Analysis (Based On R19 Regulation) - by Shaik Gouse BashaDocument255 pagesNotes On Network Analysis (Based On R19 Regulation) - by Shaik Gouse BashaShaik Gouse Basha100% (1)
- Unit 5 - MICROWAVE DESIGNDocument181 pagesUnit 5 - MICROWAVE DESIGNVanitha RNo ratings yet
- Circuit Theory (Eceg-1081) : Addis Ababa University Addis Ababa Institute of Technology (Aait)Document27 pagesCircuit Theory (Eceg-1081) : Addis Ababa University Addis Ababa Institute of Technology (Aait)AbcdNo ratings yet
- Cyclotron Angular Frequency, Problems On Magnetron: Microwave Crossed-Field Tubes: 03/12/2020 & 10:00 AM-11:00 AMDocument18 pagesCyclotron Angular Frequency, Problems On Magnetron: Microwave Crossed-Field Tubes: 03/12/2020 & 10:00 AM-11:00 AMravi kiranNo ratings yet
- Mems Lecture PlanDocument2 pagesMems Lecture PlanMahesh Kumar K BNo ratings yet
- Satellite Communication: Semester 08Document24 pagesSatellite Communication: Semester 08veluNo ratings yet
- Ece VI Digital Communication 10ec61 NotesDocument252 pagesEce VI Digital Communication 10ec61 NotesNiharika Korukonda100% (1)
- LIC EEE-Multiple Choice Questions 2017Document11 pagesLIC EEE-Multiple Choice Questions 2017jagan40% (5)
- Lecture 7 (Channel Models For Mmwave MIMO System)Document65 pagesLecture 7 (Channel Models For Mmwave MIMO System)Kushagra PratapNo ratings yet
- Navigational Aids & Radar (TC) Lab Manual 2010Document45 pagesNavigational Aids & Radar (TC) Lab Manual 2010Saurabh Patel100% (1)
- LICA Lecture Notes by A.mounikaDocument77 pagesLICA Lecture Notes by A.mounikaAnonymous 4u5XkWGONo ratings yet
- VLSI Objective Questions and Answers 1Document7 pagesVLSI Objective Questions and Answers 1avinashrai92% (12)
- Ec2042 2 MarksDocument56 pagesEc2042 2 Marksanand_duraiswamyNo ratings yet
- Ebers Moll Model PPT Compatibility ModeDocument15 pagesEbers Moll Model PPT Compatibility Moderadsrad100% (1)
- MCQ Digital Electronics - 1Document38 pagesMCQ Digital Electronics - 1avpatil333No ratings yet
- Question Bank: Site&q WirelessDocument4 pagesQuestion Bank: Site&q WirelessSanjana AkkoleNo ratings yet
- Operational Amplifier (Op-Amp)Document26 pagesOperational Amplifier (Op-Amp)Md ArifNo ratings yet
- Assignment 3 - Radio Wave PropagationDocument1 pageAssignment 3 - Radio Wave PropagationKisangiri MichaelNo ratings yet
- Unit 5 - Embedded SystemDocument58 pagesUnit 5 - Embedded Systemsujith100% (1)
- Antennas & Wave Propagation: B.Tech (Iii Year - I Sem)Document144 pagesAntennas & Wave Propagation: B.Tech (Iii Year - I Sem)Jayant Kumar AryaNo ratings yet
- Super Position and Maximum Power Transfer TheoremDocument70 pagesSuper Position and Maximum Power Transfer TheoremKasani Tirumala tejaNo ratings yet
- Digital Communication Line Codes PDFDocument7 pagesDigital Communication Line Codes PDFAzImmNo ratings yet
- Space SegmentDocument27 pagesSpace SegmentRameezNo ratings yet
- Satellite CommunicationDocument23 pagesSatellite CommunicationPrakash Velayudham VNo ratings yet
- Unit 2Document18 pagesUnit 2Anuja AnuNo ratings yet
- Attitude and Orbit ControlDocument28 pagesAttitude and Orbit ControlRaja PirianNo ratings yet
- ET PBL 1Document16 pagesET PBL 1Sumit JhaNo ratings yet
- A Solution To Remote Detection of Illegal Electricity Usage Via Power Line CommunicationDocument10 pagesA Solution To Remote Detection of Illegal Electricity Usage Via Power Line CommunicationSimon BrandlNo ratings yet
- Galaxy Owners Manual Dx77hmlDocument10 pagesGalaxy Owners Manual Dx77hmlbellscbNo ratings yet
- CCTV Security SystemDocument75 pagesCCTV Security Systemasok100% (1)
- Project Lamp Light Part 4Document124 pagesProject Lamp Light Part 4Paul Kent Polter100% (1)
- Chap10 Phase Locked LoopsDocument26 pagesChap10 Phase Locked LoopsAlaa TobasiNo ratings yet
- TV Repeater's Repeater: Boulder Amateur Television ClubDocument12 pagesTV Repeater's Repeater: Boulder Amateur Television ClubBenjamin DoverNo ratings yet
- SRSP 521 DTTDocument23 pagesSRSP 521 DTTHayat BokkhariNo ratings yet
- Overview DIP5K/EN OS/A22 DIP 5000Document8 pagesOverview DIP5K/EN OS/A22 DIP 5000honeyNo ratings yet
- Generation of Non-Standard CTCSS Tones: Application NoteDocument8 pagesGeneration of Non-Standard CTCSS Tones: Application Noteag1tatorNo ratings yet
- Manual MAK-721 PRODocument23 pagesManual MAK-721 PROamerbach55No ratings yet
- LIAISSON24 MIXBAAL MANUAL (English) YOMN4850-001 - RevE PDFDocument178 pagesLIAISSON24 MIXBAAL MANUAL (English) YOMN4850-001 - RevE PDFJuan Milton GardunoNo ratings yet
- Manual Personal GPS Tracker Logger Xexun TK 102 v2Document17 pagesManual Personal GPS Tracker Logger Xexun TK 102 v2bocaidNo ratings yet
- Ceragon - RF Units PDFDocument3 pagesCeragon - RF Units PDFbaskoroboNo ratings yet
- A Review On Signal GenerationDocument10 pagesA Review On Signal GenerationFarhan FarhanNo ratings yet
- Navedtra 14088Document214 pagesNavedtra 14088gotlove7100% (1)
- Disciplined OscillatorsDocument26 pagesDisciplined OscillatorsALEJANDRO IPATZI100% (1)
- Analog Communications: Course Code:13EC1109 L TPC 4 0 0 3Document3 pagesAnalog Communications: Course Code:13EC1109 L TPC 4 0 0 3NISHCHAY SINGHNo ratings yet
- Om Yz BR Isscc 22Document3 pagesOm Yz BR Isscc 22Ganagadhar CHNo ratings yet
- Radio AdvertisingDocument127 pagesRadio AdvertisingGd_775% (4)
- Digiplex 848 Quick Programming Guide v4 1Document14 pagesDigiplex 848 Quick Programming Guide v4 1AlexNo ratings yet
- Linear Cmos RFDocument191 pagesLinear Cmos RFcx byNo ratings yet
- Free-Space Optical Communications: Vincent W. S. Chan, Fellow, IEEE, Fellow, OSADocument13 pagesFree-Space Optical Communications: Vincent W. S. Chan, Fellow, IEEE, Fellow, OSACeline Dian SitorusNo ratings yet
- VLF Receiver Manual Issue 2Document53 pagesVLF Receiver Manual Issue 2Nitsuga PomeloréNo ratings yet
- Manual Dwyer MS-111 Pressure TransmitterDocument4 pagesManual Dwyer MS-111 Pressure TransmitterSunko MachineryNo ratings yet
- University DepartmentsDocument6 pagesUniversity DepartmentsMadhavkumarNo ratings yet
- Description: Tire and Wheel - Tire Pressure Warning SystemDocument6 pagesDescription: Tire and Wheel - Tire Pressure Warning SystemDaniel MenendezNo ratings yet
- Radio Broadcasting EquipmentDocument6 pagesRadio Broadcasting EquipmentBishIn aMillionNo ratings yet