Download as pptx, pdf, or txt
You might also like
- Invaders Around The World in 2021Document27 pagesInvaders Around The World in 2021RVLEBNo ratings yet
- BRM0012 - Consumer's Perception On Inverters in IndiaDocument3 pagesBRM0012 - Consumer's Perception On Inverters in Indiavarun kumar Verma0% (2)
- Lawshe CVR Worksheet2Document3 pagesLawshe CVR Worksheet2Giselle Medina EstradaNo ratings yet
- Chapter 2 QuestionDocument15 pagesChapter 2 QuestionHarshil RathodNo ratings yet
- Page Replacement Algorithms 2Document12 pagesPage Replacement Algorithms 2Ravindra MoteNo ratings yet
- Provera 1Document66 pagesProvera 1snezana.stepanic26No ratings yet
- برنامج الفيزياءDocument3 pagesبرنامج الفيزياءZeineb ZNo ratings yet
- Tablas RavenDocument4 pagesTablas Ravenanromluviano20No ratings yet
- Submission Date: 02-Aug-2021 04:00PM (UTC+0500) Submission ID: 1532097457 File Name: ISPO - PDF (5.73M) Word Count: 46873 Character Count: 290520Document188 pagesSubmission Date: 02-Aug-2021 04:00PM (UTC+0500) Submission ID: 1532097457 File Name: ISPO - PDF (5.73M) Word Count: 46873 Character Count: 290520Милан ТонићNo ratings yet
- Bulls EyeDocument35 pagesBulls EyeGeetikaNo ratings yet
- Exam DetailsDocument9 pagesExam DetailsRene MartinezNo ratings yet
- LT - CPT - 2 - SET - 1 OFF Line KEY-17.04.2024Document1 pageLT - CPT - 2 - SET - 1 OFF Line KEY-17.04.20241k2skiller1234No ratings yet
- Leads To Sales DemoDocument3 pagesLeads To Sales DemogenokiNo ratings yet
- Mar Kpi (MNT)Document13 pagesMar Kpi (MNT)maintainence konarNo ratings yet
- Data (Pelatihan SPSS)Document11 pagesData (Pelatihan SPSS)AzharaNo ratings yet
- SSP ExelDocument1 pageSSP ExelrubNo ratings yet
- Growing Survey ResultsDocument16 pagesGrowing Survey ResultsVictoria GelosiNo ratings yet
- All-Pairs Testing: All Pairs of Variables. This Significantly Reduces The Number of Tests That Must Be Created and RunDocument37 pagesAll-Pairs Testing: All Pairs of Variables. This Significantly Reduces The Number of Tests That Must Be Created and RunCristian MihaiNo ratings yet
- International Rig Counts For Mar 2024Document1,008 pagesInternational Rig Counts For Mar 2024Isaac NnakwuNo ratings yet
- Xcom D1 8.5Document92 pagesXcom D1 8.5Đạt Kim TrọngNo ratings yet
- ANDRADE-LESLIE JOY E.-Activity-9 - Validation-of-Scale-Based-InstrumentDocument2 pagesANDRADE-LESLIE JOY E.-Activity-9 - Validation-of-Scale-Based-InstrumentLESLIE JOY ANDRADENo ratings yet
- 06-APR-2022 12:35AM 84490579: Word Count Time Submitted Paper IdDocument87 pages06-APR-2022 12:35AM 84490579: Word Count Time Submitted Paper IdVishalNo ratings yet
- CT MotionWorksIEC 01 eLM MWiec3 CertificationTestddDocument34 pagesCT MotionWorksIEC 01 eLM MWiec3 CertificationTestddchinhnguyen.robot.ipNo ratings yet
- Kajian Hukum Tentang Force Majure Dalam Pelaksanaan Pengadaan Barang Dan Jasa Pemerintah Daerah Kabupaten Tegal Pada Masa Pandemi Covid-19Document177 pagesKajian Hukum Tentang Force Majure Dalam Pelaksanaan Pengadaan Barang Dan Jasa Pemerintah Daerah Kabupaten Tegal Pada Masa Pandemi Covid-19bsd tegalNo ratings yet
- Additional Homework ProblemsDocument5 pagesAdditional Homework ProblemsSivaMarojuNo ratings yet
- Managing Logistical SystemsDocument21 pagesManaging Logistical SystemsunnateeNo ratings yet
- Answer Key July 28, 2013 Paper - II For Class VI-VIII SET: PDocument1 pageAnswer Key July 28, 2013 Paper - II For Class VI-VIII SET: PManisha JangraNo ratings yet
- Final Exam in DSADocument3 pagesFinal Exam in DSACORPUZ, AGOTNo ratings yet
- TSPSC Group 1 Test 14 Key Explanations English Lyst1530Document38 pagesTSPSC Group 1 Test 14 Key Explanations English Lyst1530ramyaNo ratings yet
- Kasus: Hasil Skoring Instrumen Iklim Organisasi Yang Terdiri Atas 30 Item Diberikan Kepada 20 Orang Responden Uji Coba SBBDocument1 pageKasus: Hasil Skoring Instrumen Iklim Organisasi Yang Terdiri Atas 30 Item Diberikan Kepada 20 Orang Responden Uji Coba SBBrubNo ratings yet
- 2018 Ce 316Document7 pages2018 Ce 316dynxqcrygNo ratings yet
- Memory Upgrade For Fanuc 10Document3 pagesMemory Upgrade For Fanuc 10mtcalirezaNo ratings yet
- Addition Subtraction Fraction Division Multiplication TimeDocument19 pagesAddition Subtraction Fraction Division Multiplication TimeJomsEve IsonNo ratings yet
- BRM0012 - Consumer's Perception On Inverters in India PDFDocument3 pagesBRM0012 - Consumer's Perception On Inverters in India PDFshivani bistNo ratings yet
- Usability DataLogger v2Document84 pagesUsability DataLogger v2GeekyGrrrlNo ratings yet
- Oper 441 Tutorial 01 Sep201Document2 pagesOper 441 Tutorial 01 Sep201Saad SaadNo ratings yet
- Consumer Survey On Website Development and IT Solutions For Emerging Start UpsDocument12 pagesConsumer Survey On Website Development and IT Solutions For Emerging Start UpsRohit MukherjeeNo ratings yet
- Assignment 1Document3 pagesAssignment 1sandeep BhanotNo ratings yet
- Feature of CarDocument11 pagesFeature of CarMONIKA KUMARNo ratings yet
- Mobile Professionals, Inc: - Your Partner For Wireless Engineering SolutionsDocument27 pagesMobile Professionals, Inc: - Your Partner For Wireless Engineering Solutionsgargee502No ratings yet
- Feedback Shahriear Toyon Practicum Report19103004 DocxDocument100 pagesFeedback Shahriear Toyon Practicum Report19103004 Docxnazir.cseNo ratings yet
- ANALISIS PENDIDIKAN ΕΚΟΝΟΜΙ INFORMAL-bagus (1)Document115 pagesANALISIS PENDIDIKAN ΕΚΟΝΟΜΙ INFORMAL-bagus (1)Darul Daeng SiriwaNo ratings yet
- Unit-5 SQC Part-BDocument2 pagesUnit-5 SQC Part-Bbrgamer0614No ratings yet
- Priority QueuesDocument104 pagesPriority QueuesenatholdingsNo ratings yet
- Excel Kesuaian Resep Dengan Formularium Mei 2021Document14 pagesExcel Kesuaian Resep Dengan Formularium Mei 2021Auliya Ma'ruf AzisNo ratings yet
- F2P Melee Max Hit TableDocument4 pagesF2P Melee Max Hit TableFelix MorenoNo ratings yet
- 422F2-444F2 Intro en SLD-CalloutsDocument19 pages422F2-444F2 Intro en SLD-CalloutsBilal SetifNo ratings yet
- ThesisDocument168 pagesThesisIrfania ItcenterNo ratings yet
- Tutorial Questions Managing Quality: Observation Sample 1 2 3 4 5 6 7 8Document5 pagesTutorial Questions Managing Quality: Observation Sample 1 2 3 4 5 6 7 8lianliang0% (1)
- Format Penilaian Bleef TestDocument4 pagesFormat Penilaian Bleef TestFristian Chayyi100% (1)
- Upri Set - B: L1-Hindi L2-English L2-Urdu L2-Sanskrit Science & Mathematics Social Studies & Other SubjectsDocument2 pagesUpri Set - B: L1-Hindi L2-English L2-Urdu L2-Sanskrit Science & Mathematics Social Studies & Other SubjectsNishit kumarNo ratings yet
- Control Charts: Observations in Each Sub-Group (In CM) Subgroup SDocument2 pagesControl Charts: Observations in Each Sub-Group (In CM) Subgroup SPrajaktaNo ratings yet
- Mar - July 2023Document33 pagesMar - July 2023Ed SheeranNo ratings yet
- A 4-Page Summary and The Lecture Notes and Handouts)Document6 pagesA 4-Page Summary and The Lecture Notes and Handouts)Alex WeldonNo ratings yet
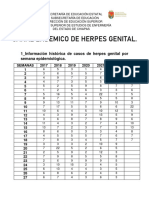
- Herpes GenitalDocument4 pagesHerpes GenitalIsaac Alejandro Castro RamírezNo ratings yet
- Direct Manpower: Project Owner Location Scope of Works SubjectDocument2 pagesDirect Manpower: Project Owner Location Scope of Works SubjectMarivic D. SantosNo ratings yet
- APRJC-CET 2015: Group:Bpc (English, Biology and Physical SciencesDocument4 pagesAPRJC-CET 2015: Group:Bpc (English, Biology and Physical SciencesRamanaNo ratings yet
- 05 - Job Factor Scoring and Weighting MatrixDocument1 page05 - Job Factor Scoring and Weighting MatrixMatthew3791No ratings yet
- Operation ResearchDocument8 pagesOperation ResearchMahfooz AlamNo ratings yet
- Applied Predictive Analytics: Principles and Techniques for the Professional Data AnalystFrom EverandApplied Predictive Analytics: Principles and Techniques for the Professional Data AnalystNo ratings yet
- Enotes CO3Document14 pagesEnotes CO3Arjun NaiduNo ratings yet
- Candidates Declaration: Industrial TrainingDocument9 pagesCandidates Declaration: Industrial TrainingArjun NaiduNo ratings yet
- Session 25,26Document14 pagesSession 25,26Arjun NaiduNo ratings yet
- Session 27 and 28Document25 pagesSession 27 and 28Arjun NaiduNo ratings yet
- Session 22, 23Document14 pagesSession 22, 23Arjun NaiduNo ratings yet
- Session 36Document10 pagesSession 36Arjun NaiduNo ratings yet
- KalyanDocument6 pagesKalyanArjun NaiduNo ratings yet
- SeminarDocument16 pagesSeminarArjun NaiduNo ratings yet
- KalyanDocument6 pagesKalyanArjun NaiduNo ratings yet
- Abap F ContentsDocument3 pagesAbap F ContentsArjun NaiduNo ratings yet
- JVC Lt-32df7bc Lt-32df7bk SCHDocument22 pagesJVC Lt-32df7bc Lt-32df7bk SCHAnonymous PDNToMmNmRNo ratings yet
- InfilinkDocument94 pagesInfilinkRaziel VelazquezNo ratings yet
- DC Motor Losses and EfficiencyDocument7 pagesDC Motor Losses and EfficiencyAbdelrhman Essam AttiaNo ratings yet
- I V I 1/R I V/R V Ir: Department of Mechanical Engineering Djj20053: Electrical TechnologyDocument5 pagesI V I 1/R I V/R V Ir: Department of Mechanical Engineering Djj20053: Electrical TechnologyMohd ZahiruddinNo ratings yet
- Insulated Gate Bipolar Transistor With Ultrafast Soft Recovery DiodeDocument17 pagesInsulated Gate Bipolar Transistor With Ultrafast Soft Recovery DiodeOlavo FelterNo ratings yet
- Unit - 5 - QB - Assignment - Real World Interfacing With Cortex M4 Based MicrocontrollerDocument2 pagesUnit - 5 - QB - Assignment - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNo ratings yet
- DLD Research PPRDocument10 pagesDLD Research PPRAmna HabibNo ratings yet
- Check, Troubleshoot and Adjust The TECSUN 2P3 Superheterodyne MW Kit RadioDocument4 pagesCheck, Troubleshoot and Adjust The TECSUN 2P3 Superheterodyne MW Kit RadioJose MesquitaNo ratings yet
- Mototrbo Portable Dep 450 Basic Service ManualDocument95 pagesMototrbo Portable Dep 450 Basic Service ManualAyon BaxterNo ratings yet
- BatteriesDocument23 pagesBatteriesapi-3701567100% (2)
- Non Contact Infrared Body Thermometer: User ManualDocument18 pagesNon Contact Infrared Body Thermometer: User ManualfayçalNo ratings yet
- Conventional Timer: Counter in PLCDocument3 pagesConventional Timer: Counter in PLCMaidul Sikder SetuNo ratings yet
- Xrvs 77Document89 pagesXrvs 77thescientificrangerNo ratings yet
- GSM Based Wireless Notice Board Using ARDUINODocument9 pagesGSM Based Wireless Notice Board Using ARDUINOIJARTET0% (1)
- Signal Circuit EMI: UnwantedDocument4 pagesSignal Circuit EMI: UnwantedmarichuNo ratings yet
- Unit-Iii Engine Auxiliary Systems: Fuel Feed SystemDocument26 pagesUnit-Iii Engine Auxiliary Systems: Fuel Feed SystemMuthuvel MNo ratings yet
- EC501 - 1 - Intro - History (Compatibility Mode)Document20 pagesEC501 - 1 - Intro - History (Compatibility Mode)Naishadh BhavsarNo ratings yet
- Topic #3 - CPU - With NotationsDocument39 pagesTopic #3 - CPU - With NotationsDavidNo ratings yet
- Spirit One DatasheetDocument3 pagesSpirit One DatasheetVincent BoninNo ratings yet
- Electron Microscopy: by Dr. Kaustab GhoshDocument9 pagesElectron Microscopy: by Dr. Kaustab GhoshNehal Aswani 19BEC1125No ratings yet
- 42LC55 42 Inch LG ManualDocument62 pages42LC55 42 Inch LG ManualRadu BriaNo ratings yet
- Aguado Measurement 1Document6 pagesAguado Measurement 1HADHI HASSAN KHANNo ratings yet
- MInitransceiver SSB 80mDocument8 pagesMInitransceiver SSB 80mag1tatorNo ratings yet
- Study of Binary Phase Shift KeyingDocument5 pagesStudy of Binary Phase Shift KeyingShivachandran NadarNo ratings yet
- Pulse ModulationDocument9 pagesPulse Modulationجلال عواد كاظم جودةNo ratings yet
- Schematics of Delabs - Thermocouple Amplifier StandardDocument1 pageSchematics of Delabs - Thermocouple Amplifier StandardgilmarnetoNo ratings yet
- Q.Peak Duo Xl-G9.3: Enduring High PerformanceDocument2 pagesQ.Peak Duo Xl-G9.3: Enduring High Performancesteven6diaz-2No ratings yet
- Operating Instructions: K30 ES, K30 Vario, K30 CompetitionDocument20 pagesOperating Instructions: K30 ES, K30 Vario, K30 CompetitionIgor RamosNo ratings yet
- CT 25 L 8 GDocument20 pagesCT 25 L 8 GkosmitoNo ratings yet
- DSP Project ReportDocument14 pagesDSP Project ReportMuhammad RashidNo ratings yet