Download as pptx, pdf, or txt
You might also like
- FGC Team Greece Eng Book v3Document28 pagesFGC Team Greece Eng Book v3api-656115276No ratings yet
- Statement of PurposeDocument2 pagesStatement of PurposeNazmul Hasan71% (7)
- LabVIEW Project - Obstacle Detection and Avoidance RobotDocument26 pagesLabVIEW Project - Obstacle Detection and Avoidance RobotParag AggarwalNo ratings yet
- 80k+ Priv8 IPTV (Userpass) CombolistDocument1,472 pages80k+ Priv8 IPTV (Userpass) CombolistJohn AndresNo ratings yet
- RTOS Based Embedded System DesignDocument16 pagesRTOS Based Embedded System DesignSagar DhapkeNo ratings yet
- Creating and Configuring A BACnet Network With b3 BACnet Devices Tutorial GuideDocument212 pagesCreating and Configuring A BACnet Network With b3 BACnet Devices Tutorial GuideDGG50% (2)
- Junaid Jahangir Mudasir Ahmad Rayees Ahmad Shahreyar Cha Udhary Project Guide Mr. Baldev Raj Ms. Diksha SharmaDocument12 pagesJunaid Jahangir Mudasir Ahmad Rayees Ahmad Shahreyar Cha Udhary Project Guide Mr. Baldev Raj Ms. Diksha SharmaJunaid JahangirNo ratings yet
- ManuscriptDocument22 pagesManuscriptTesterNo ratings yet
- IJMET 09-01-016 With Cover Page v2Document10 pagesIJMET 09-01-016 With Cover Page v2mane prathameshNo ratings yet
- Pawaskar 2020Document4 pagesPawaskar 2020mathulegionNo ratings yet
- Implementation of VFHDocument6 pagesImplementation of VFHqwerty uNo ratings yet
- Multifuntioning RobotDocument139 pagesMultifuntioning RobotshamstouhidNo ratings yet
- MQP RoboDog Final ReportDocument64 pagesMQP RoboDog Final ReportThink DiagNo ratings yet
- 6 Degrees of Freedom Robotic Arm Gripper MMDocument15 pages6 Degrees of Freedom Robotic Arm Gripper MMRobin RS BrotherNo ratings yet
- Implementation of 6-DOF Biped Footstep Planning Under Different Terrain ConditionsDocument6 pagesImplementation of 6-DOF Biped Footstep Planning Under Different Terrain ConditionsC SYAHBANANo ratings yet
- Balancing RobotDocument5 pagesBalancing RobotMilton MuñozNo ratings yet
- HEXAPODDocument14 pagesHEXAPODAkriti SharmaNo ratings yet
- Design and Manufacturing of Low Cost Scara Robot IJERTV10IS060027-With-cover-page-V2 3Document5 pagesDesign and Manufacturing of Low Cost Scara Robot IJERTV10IS060027-With-cover-page-V2 3Omar MuhammadNo ratings yet
- Robotics Project ProposalDocument7 pagesRobotics Project Proposalgustavstierlin40No ratings yet
- Your Big IdeaDocument18 pagesYour Big IdeaYuvatejasviNo ratings yet
- Unmanned Ground VehicleDocument7 pagesUnmanned Ground VehicleIvan AvramovNo ratings yet
- Arduino Based Movable Robotic Arm: Team MembersDocument9 pagesArduino Based Movable Robotic Arm: Team MembersKrishna VinodNo ratings yet
- Stair Climbing Robot ReportDocument15 pagesStair Climbing Robot Report22me01004No ratings yet
- Gesture Controlled Robot With Robotic ArmDocument10 pagesGesture Controlled Robot With Robotic ArmIJRASETPublicationsNo ratings yet
- SDP ReportDocument8 pagesSDP ReportWaqas KhanNo ratings yet
- Robotic Arm For Pick and Place Application: Kaustubh Ghadge, Saurabh More, Pravin GaikwadDocument9 pagesRobotic Arm For Pick and Place Application: Kaustubh Ghadge, Saurabh More, Pravin Gaikwadsachin bibhishan parkhe0% (1)
- Servo Based 5 Axis Robotic Arm Project ReportDocument38 pagesServo Based 5 Axis Robotic Arm Project ReportRobo India100% (1)
- Design of Hexapod Robot Movement Based On ArduinoDocument8 pagesDesign of Hexapod Robot Movement Based On ArduinoGEES TIKKANo ratings yet
- Project Report FormatDocument31 pagesProject Report FormatRevatiNo ratings yet
- Making of 3D Printed Humanoid Robot: A Project Presentation OnDocument34 pagesMaking of 3D Printed Humanoid Robot: A Project Presentation OnmanoramaNo ratings yet
- A Novel Design of A Quadruped Robot For Research PurposesDocument13 pagesA Novel Design of A Quadruped Robot For Research Purposessushreet2754No ratings yet
- 3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartDocument7 pages3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartTrương Đức BìnhNo ratings yet
- Project Report On Robotic ArmDocument17 pagesProject Report On Robotic ArmGina SreeNo ratings yet
- Ndustrial Robotics: The Heart of Modern Manufacturing..Document54 pagesNdustrial Robotics: The Heart of Modern Manufacturing..nishanth870% (1)
- Kinematic of AdapthreeDocument19 pagesKinematic of AdapthreeBmn85No ratings yet
- 3D Simulation System of Guiding Mobile Robot Based On Open GL LibraryDocument4 pages3D Simulation System of Guiding Mobile Robot Based On Open GL LibraryWarren Smith QC (Quantum Cryptanalyst)No ratings yet
- Presentation Pick and Place Robo Arm 3d PrintedDocument16 pagesPresentation Pick and Place Robo Arm 3d PrintedKshitij BandarNo ratings yet
- DIY Stair Climbing Robot: RationaleDocument9 pagesDIY Stair Climbing Robot: RationaleFAseeh MalikNo ratings yet
- Gesture Controlled Arm&wheels Robot: Nooraldeen Zreaq Omar Dweikat Supervisor: DR - Aladdin MasriDocument43 pagesGesture Controlled Arm&wheels Robot: Nooraldeen Zreaq Omar Dweikat Supervisor: DR - Aladdin MasriAhmedNo ratings yet
- Wireless Mobile Robotic ArmDocument7 pagesWireless Mobile Robotic ArmUendel DiegoNo ratings yet
- 27 PDFDocument8 pages27 PDFSenthil KumarNo ratings yet
- 1902 03547 PDFDocument8 pages1902 03547 PDFDipak KumarNo ratings yet
- Ism06 43F PDFDocument5 pagesIsm06 43F PDFmaldiniNo ratings yet
- 004 Zeeshan AiprDocument26 pages004 Zeeshan Aipr26- Amal SathyanNo ratings yet
- Exp 9Document9 pagesExp 920R211 - D L SHRIVARSHININo ratings yet
- Obstrical Avoiding RobotDocument10 pagesObstrical Avoiding RobotHarsh VardhanNo ratings yet
- Obstrical Avoiding RobotDocument10 pagesObstrical Avoiding RobotHarsh VardhanNo ratings yet
- Design, Analysis and Manufacturing of Four Degree of Freedom Wireless (Wi-Fi) Controlled Robotic ARMDocument12 pagesDesign, Analysis and Manufacturing of Four Degree of Freedom Wireless (Wi-Fi) Controlled Robotic ARMMasood Akhtar VaheedNo ratings yet
- Path Finder Autonomous RobotDocument6 pagesPath Finder Autonomous RobotIJRASETPublicationsNo ratings yet
- ReportDocument47 pagesReportConsole BoyNo ratings yet
- Using Robot Operating System For Autonomous ControDocument7 pagesUsing Robot Operating System For Autonomous ControDaniya JNo ratings yet
- 2019 DSPL TidyboyDocument8 pages2019 DSPL Tidyboyrcw98710No ratings yet
- Industrial RoboticsDocument44 pagesIndustrial RoboticsAlvaro RamirezNo ratings yet
- An Overview of Spy RobotDocument19 pagesAn Overview of Spy RobotNihaNo ratings yet
- Wirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojDocument4 pagesWirelessroboticarm Vehicle: P. V. Rama Raju, G. Naga Raju, K. Venkat Vinay, M. Anil Kumar, K. Naga Manju, K. ManojNaga Raju GNo ratings yet
- System On Wheels DocumentationDocument16 pagesSystem On Wheels DocumentationmbdtechnologiessolutionsNo ratings yet
- A Proposal On Robot-Iot: Prepared By: Er. Swastika Thapa Er. Sagar Dip Limbu Er. Dhiraj Sunar Er. Krishna Dev ChaudharyDocument11 pagesA Proposal On Robot-Iot: Prepared By: Er. Swastika Thapa Er. Sagar Dip Limbu Er. Dhiraj Sunar Er. Krishna Dev Chaudharyskull hertzNo ratings yet
- Jaguar V6A ManualDocument29 pagesJaguar V6A ManualParvezNo ratings yet
- Automatic Balancing Robot: Madhuram.M (Assistant Professor)Document12 pagesAutomatic Balancing Robot: Madhuram.M (Assistant Professor)رشيد بن صغيرNo ratings yet
- Design and Fabrication of Hexapod Robot With Wireless ActuationDocument30 pagesDesign and Fabrication of Hexapod Robot With Wireless ActuationTesterNo ratings yet
- Fundamentals of RoboticsDocument5 pagesFundamentals of RoboticsFranklin Jara MoncayoNo ratings yet
- Biped NewDocument86 pagesBiped NewsruthyNo ratings yet
- Braintree 15Document6 pagesBraintree 15paypaltrexNo ratings yet
- Aaroure: Salah EddineDocument2 pagesAaroure: Salah EddineAy OùbNo ratings yet
- CadburyDocument24 pagesCadburyDeepti Mangal50% (2)
- Crypt Arithmatic Problem SolutionDocument10 pagesCrypt Arithmatic Problem SolutionHariom Patel100% (4)
- DVB Si BasicsDocument2 pagesDVB Si BasicsAbhishek PandeyNo ratings yet
- VedicReport6 10 20179 56 16PMDocument47 pagesVedicReport6 10 20179 56 16PManandpaithankar13No ratings yet
- PHREEQ C Modelling Tool Application To Determine The Effect of Anions On Speciation of Selected Metals in Water Systems Within Kajiado North Constituency in KenyaDocument71 pagesPHREEQ C Modelling Tool Application To Determine The Effect of Anions On Speciation of Selected Metals in Water Systems Within Kajiado North Constituency in KenyaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- TIME PumpsDocument13 pagesTIME PumpsAndres RedondoNo ratings yet
- Castel Airco 2014-15Document68 pagesCastel Airco 2014-15Anderson Giovanny Herrera DelgadoNo ratings yet
- Erba BilubrinDocument2 pagesErba BilubrinOjie SarojieNo ratings yet
- M.bed Back WallDocument1 pageM.bed Back WallAMAZE INTERIORNo ratings yet
- Ariza, C. Sonifying SievesDocument8 pagesAriza, C. Sonifying SievesxdimitrisNo ratings yet
- Yealink Phone UserGuide PDFDocument2 pagesYealink Phone UserGuide PDFEric SmithNo ratings yet
- Circular Motion: American Journal of Physics July 2000Document8 pagesCircular Motion: American Journal of Physics July 2000GurjotNo ratings yet
- NOVATHERABBITPATTERNDocument10 pagesNOVATHERABBITPATTERNTejidos Castillo Amigurumis con Amor100% (3)
- Security ManagementDocument35 pagesSecurity ManagementVanessa CarreteNo ratings yet
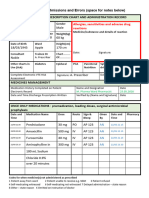
- Drug Chart 7 - Hee InternetDocument19 pagesDrug Chart 7 - Hee InternetAhmzzdNo ratings yet
- PAFLU Vs Sec of LaborDocument1 pagePAFLU Vs Sec of LaborMavic Morales100% (1)
- Activity - 2 - (Discretel) (A1)Document1 pageActivity - 2 - (Discretel) (A1)AnkitChutaniNo ratings yet
- Institutions and Regional Integration in AfricaDocument24 pagesInstitutions and Regional Integration in AfricaOrnela FabaniNo ratings yet
- Assessment of Temporal Hydrological Variations Due To Land Use Changes Using Remote Sensing/GISDocument38 pagesAssessment of Temporal Hydrological Variations Due To Land Use Changes Using Remote Sensing/GISWubieNo ratings yet
- Semikron Datasheet SKB 30Document3 pagesSemikron Datasheet SKB 30Kleber Milton de SouzaNo ratings yet
- Chapter 3 CVPDocument26 pagesChapter 3 CVPshuhadaNo ratings yet
- ADTL-MSCTM - Exercises - of - Data - Input - and Exploratory Analysis Using - RDocument3 pagesADTL-MSCTM - Exercises - of - Data - Input - and Exploratory Analysis Using - RPriyankaNo ratings yet
- Yi PDFDocument2 pagesYi PDFAnonymous La5rPMYNo ratings yet
- Commercial Paper: Presented by Dharani Dharan.m Vijaya Kumar S.BDocument16 pagesCommercial Paper: Presented by Dharani Dharan.m Vijaya Kumar S.Budaya37No ratings yet