Download as pptx, pdf, or txt
You might also like
- POSPac MMS Geoid Converter User ManualDocument10 pagesPOSPac MMS Geoid Converter User Manual渕上翔No ratings yet
- GUIDE Wingtra Photogrammetry vs. LIDARDocument7 pagesGUIDE Wingtra Photogrammetry vs. LIDARArqticoNo ratings yet
- Radar Remote Sensing PDFDocument955 pagesRadar Remote Sensing PDFprigogine100% (1)
- LiDAR Case StudyDocument7 pagesLiDAR Case StudyMallika BediaNo ratings yet
- GIS Training - Managing Distributed DataDocument66 pagesGIS Training - Managing Distributed Datajayjaymahe100% (1)
- Passive Remote Sensing: Allocations, Sensors, Measurements and ApplicationsDocument34 pagesPassive Remote Sensing: Allocations, Sensors, Measurements and ApplicationsAndrea DeleonNo ratings yet
- Introduction To LIDAR Mapping TechnologyDocument35 pagesIntroduction To LIDAR Mapping TechnologyDimas Haryo Nugroho PutroNo ratings yet
- PolSARpro Software EPottier PDFDocument160 pagesPolSARpro Software EPottier PDFaqzeeshan78No ratings yet
- Tutorial For Processing LiDAR Datasets and Visualization (For Slovenian Lidar)Document13 pagesTutorial For Processing LiDAR Datasets and Visualization (For Slovenian Lidar)ksk upNo ratings yet
- Bellringer: Explain in Complete SentencesDocument89 pagesBellringer: Explain in Complete SentencesPramod AroteNo ratings yet
- Synthetic Aperture Radar Signal Processing Technique For Target Image GenerationDocument4 pagesSynthetic Aperture Radar Signal Processing Technique For Target Image GenerationVarun GangwarNo ratings yet
- SAR Remote Sensing (Microwave Remote Sensing) Shared by Eugène Dongmo A.Document65 pagesSAR Remote Sensing (Microwave Remote Sensing) Shared by Eugène Dongmo A.Eugene DongmoNo ratings yet
- Earth Imaging Basics - Spectral ResolutionDocument5 pagesEarth Imaging Basics - Spectral ResolutionEduardoLicoNo ratings yet
- Sarmap Manual V 2014 PDFDocument39 pagesSarmap Manual V 2014 PDFHerry SaputraNo ratings yet
- Light Detection and Ranging (LIDAR) : Submitted By: Submitted ToDocument23 pagesLight Detection and Ranging (LIDAR) : Submitted By: Submitted ToApurva ChoudharyNo ratings yet
- Remote SensingDocument40 pagesRemote SensingPijush KarmakarNo ratings yet
- TerrSet TutorialDocument489 pagesTerrSet TutorialM MuhammadNo ratings yet
- Automated Remote SensingDocument18 pagesAutomated Remote Sensing15TUEC110 KIRTHIKA S.No ratings yet
- Remote Sensing HydrologyDocument34 pagesRemote Sensing HydrologyMehboob AlamNo ratings yet
- TerrSet MANUALDocument392 pagesTerrSet MANUALM MuhammadNo ratings yet
- Mobile MappingDocument5 pagesMobile MappingNorthern Engineering SurveysNo ratings yet
- Close-Range Photogrammetry Applications PDFDocument12 pagesClose-Range Photogrammetry Applications PDFDoc2005No ratings yet
- Orthorectification Using Erdas ImagineDocument14 pagesOrthorectification Using Erdas ImagineArga Fondra OksapingNo ratings yet
- LEC1 - Intro To Remote SensingDocument67 pagesLEC1 - Intro To Remote SensingNaim LotfiNo ratings yet
- Possibilities of TlsDocument10 pagesPossibilities of TlsdrummingstickNo ratings yet
- Remote Sensing Data ProcessingDocument12 pagesRemote Sensing Data ProcessingGaurav SrivastavNo ratings yet
- 1.2 Remote Sensing Concept: Data AcquisitionDocument43 pages1.2 Remote Sensing Concept: Data AcquisitionZanobia666No ratings yet
- Geographic Information System (GIS)Document27 pagesGeographic Information System (GIS)AishaZebNo ratings yet
- Multispectral BasicsDocument15 pagesMultispectral BasicsRanti Dev VishwakarmaNo ratings yet
- Remote AssignmentDocument6 pagesRemote AssignmentAbdu MohaNo ratings yet
- Remote SensingDocument182 pagesRemote Sensingnil julfikarNo ratings yet
- Remotely Sensed Data Characterization Classification and AccuraciesDocument712 pagesRemotely Sensed Data Characterization Classification and AccuraciesJulio Covarrubia100% (1)
- Lidar Technology (Seminar-1)Document17 pagesLidar Technology (Seminar-1)Trupti ParidaNo ratings yet
- Sar Image FormationDocument15 pagesSar Image FormationMusyarofah HanafiNo ratings yet
- Introduction To Photogrammetry 22 May 2022Document63 pagesIntroduction To Photogrammetry 22 May 2022Aisyah KiswantohNo ratings yet
- Introduction To Synthetic Aperture Sonar PDFDocument27 pagesIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraNo ratings yet
- Mining Subsidence Monitoring Using The Combined Insar and Gps ApproachDocument11 pagesMining Subsidence Monitoring Using The Combined Insar and Gps ApproachPaweł PacekNo ratings yet
- 8 - RADAR and LIDARDocument77 pages8 - RADAR and LIDARAli Nasiri100% (1)
- SAR-Principles and ApplicationsDocument62 pagesSAR-Principles and ApplicationsMarusan PetpookaewNo ratings yet
- Topographic Correction of Satellite Images For Improved LULC Classification in Alpine AreasDocument8 pagesTopographic Correction of Satellite Images For Improved LULC Classification in Alpine AreasRicardo NevesNo ratings yet
- General Facts About The Lidar TechniqueDocument29 pagesGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Geographic Information Systems: Lecture - IDocument29 pagesGeographic Information Systems: Lecture - ISanthosh JithendraNo ratings yet
- List The Uses of PhotogrammetryDocument4 pagesList The Uses of Photogrammetrynik fatehah67% (3)
- Quick Introduction To Lidar and Basic Lidar ToolsDocument34 pagesQuick Introduction To Lidar and Basic Lidar Toolsdeshmukhds2492100% (2)
- Microwave Remote Sensing: Rucha Joshi (M.Tech) Assistant Professor Geoinformatics Division University of PuneDocument52 pagesMicrowave Remote Sensing: Rucha Joshi (M.Tech) Assistant Professor Geoinformatics Division University of Puneरुचा जोशीNo ratings yet
- Application of Remote SensingDocument33 pagesApplication of Remote SensingthanhNo ratings yet
- Insar Training: Land Subsidence With Sentinel-1Document35 pagesInsar Training: Land Subsidence With Sentinel-1Ryan A. RamirezNo ratings yet
- Light Detection and Ranging: Harsh BansalDocument8 pagesLight Detection and Ranging: Harsh BansalHarsh BansalNo ratings yet
- History of GISDocument2 pagesHistory of GISAyesha AeonNo ratings yet
- PPTDocument30 pagesPPTChrist Zefanya OmegaNo ratings yet
- Applications of Remote Sensing in Disaster Management Earthquakes and Land SlidesDocument22 pagesApplications of Remote Sensing in Disaster Management Earthquakes and Land SlidesSourabh Raj DesaiNo ratings yet
- WingtraOne BrochureDocument24 pagesWingtraOne BrochurecarlosNo ratings yet
- inSAR Processing For DEM Generation PDFDocument8 pagesinSAR Processing For DEM Generation PDFJohn GkanatsiosNo ratings yet
- Remote Sensing GISDocument28 pagesRemote Sensing GIShishamuddinohariNo ratings yet
- Light Detection and RangingDocument30 pagesLight Detection and RangingSIDDHARTH NAHARNo ratings yet
- Forest Cover Change Analysis - Nepal - Low QualityDocument50 pagesForest Cover Change Analysis - Nepal - Low QualityRabin NiraulaNo ratings yet
- Remote Sensing Lecture NotesDocument20 pagesRemote Sensing Lecture NotesRoy XuNo ratings yet
- Teaching Geographic Information Science and Technology in Higher EducationFrom EverandTeaching Geographic Information Science and Technology in Higher EducationNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
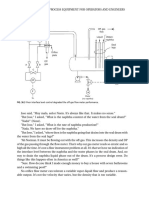
- 02.understanding Process Equipment For Operators & Engineers-53Document5 pages02.understanding Process Equipment For Operators & Engineers-53Aatish ChandrawarNo ratings yet
- Technical DescriptionDocument5 pagesTechnical DescriptionEzequias RoquimNo ratings yet
- Environmental Science (Module 7 Part 2)Document21 pagesEnvironmental Science (Module 7 Part 2)Rosemarie R. ReyesNo ratings yet
- Vocabulary: Rain Clouds Cold LightningDocument2 pagesVocabulary: Rain Clouds Cold LightningMARIA TERESA LOPEZ CINTAS100% (1)
- Thermodynamics 1: Prepared byDocument105 pagesThermodynamics 1: Prepared byReyven Recon100% (1)
- The Fan - Theory and Practice of Centrifugal and Axial FansDocument320 pagesThe Fan - Theory and Practice of Centrifugal and Axial FansjcbobedaNo ratings yet
- Ch-4 AssignmentDocument15 pagesCh-4 AssignmentGamer AditKillsNo ratings yet
- Celestial Bodies WorksheetDocument45 pagesCelestial Bodies WorksheetSanaaNo ratings yet
- Summative Test in Science 9Document2 pagesSummative Test in Science 9analyn.reyes003No ratings yet
- Flash Evaporator) : Fresh Water GeneratorDocument8 pagesFlash Evaporator) : Fresh Water Generatorpranab sakarNo ratings yet
- Ebook Terraforming Mars Astrobiology Perspectives On Life in The Universe 1St Edition Martin Beech Online PDF All ChapterDocument69 pagesEbook Terraforming Mars Astrobiology Perspectives On Life in The Universe 1St Edition Martin Beech Online PDF All Chapterscott.oldenkamp715100% (7)
- Coffee Shop Company ProfileDocument48 pagesCoffee Shop Company ProfileputraariyawanNo ratings yet
- Layer of The Earth Atmosphere Final Lesson Plan G7 Science Final Demo MyleneDocument7 pagesLayer of The Earth Atmosphere Final Lesson Plan G7 Science Final Demo MyleneDanica GanzanNo ratings yet
- Chapter 2 - Compressed Air PreparationDocument6 pagesChapter 2 - Compressed Air PreparationerickaNo ratings yet
- Module 3 Unfccc and Kyoto ProtocolDocument33 pagesModule 3 Unfccc and Kyoto ProtocolShiv ShankarNo ratings yet
- Lif Vis Pol Intp Unit 2a Answer KeyDocument4 pagesLif Vis Pol Intp Unit 2a Answer KeyDawid KitaNo ratings yet
- This Study Resource Was: Jerome AngelesDocument5 pagesThis Study Resource Was: Jerome AngelesHugsNo ratings yet
- Manuel G. Araullo High School: Grade 1 To 12 Daily Lesson LogDocument4 pagesManuel G. Araullo High School: Grade 1 To 12 Daily Lesson LogjemNo ratings yet
- Chapter 5 Homework 2Document4 pagesChapter 5 Homework 2Mary JewelNo ratings yet
- "Where We Belong?" RationaleDocument15 pages"Where We Belong?" RationaleJanika Nicole TanNo ratings yet
- Temperature and Pressure Practice ProblemsDocument4 pagesTemperature and Pressure Practice ProblemsDominic LibradillaNo ratings yet
- 15.1 Venus 15.1.1 Origin of Venus' Thick AtmosphereDocument8 pages15.1 Venus 15.1.1 Origin of Venus' Thick AtmosphereNi'maturRohmahNo ratings yet
- CH126P.B22.M1Exam (M1.Exam.P2)Document2 pagesCH126P.B22.M1Exam (M1.Exam.P2)Luis Alfonso DañezNo ratings yet
- PDFDocument249 pagesPDFAkash GoelNo ratings yet
- General Education Reviewer (PRC)Document44 pagesGeneral Education Reviewer (PRC)Ara HerreraNo ratings yet
- 2018 Index of Military Strength Air Domain EssayDocument15 pages2018 Index of Military Strength Air Domain EssayThe Heritage FoundationNo ratings yet
- Module 1 - KINETIC MOLECULAR THEORY, IMF, AND PROPERTIES OF LIQUIDDocument5 pagesModule 1 - KINETIC MOLECULAR THEORY, IMF, AND PROPERTIES OF LIQUIDGabo AlfonsoNo ratings yet
- Class Test 2 31 JULY 2021: Process Fluid FlowDocument6 pagesClass Test 2 31 JULY 2021: Process Fluid FlowEnabewhkom OhpmNo ratings yet
- Neptune - WikipediaDocument29 pagesNeptune - WikipediaBryan Paul BautistaNo ratings yet
- Climate Change Advocacy Plan Report: Kristina Mae Bayano Grade 12 ST - Bartholomew (Stem)Document7 pagesClimate Change Advocacy Plan Report: Kristina Mae Bayano Grade 12 ST - Bartholomew (Stem)Hazel BayanoNo ratings yet