Download as pptx, pdf, or txt
You might also like
- Operating System: Concurrent Process and SchedulingDocument98 pagesOperating System: Concurrent Process and Schedulinghorridbeast000No ratings yet
- Os 6Document41 pagesOs 6kareem mohamedNo ratings yet
- Unit 2-1Document116 pagesUnit 2-1harikrishnahari6276No ratings yet
- Process Management: BY N.MadhuriDocument168 pagesProcess Management: BY N.Madhurimanjula mandavaNo ratings yet
- Operating System Processes and CPU SchedulingDocument39 pagesOperating System Processes and CPU SchedulingRadhika BadbadeNo ratings yet
- Os Unit 2Document60 pagesOs Unit 2Anish Dubey SultanpurNo ratings yet
- OS Chapter 2Document101 pagesOS Chapter 2200339616138No ratings yet
- Chapter 3Document58 pagesChapter 3Adarsh A ANo ratings yet
- Operating Systems: WEEK 5 - ProcessesDocument21 pagesOperating Systems: WEEK 5 - ProcessesYano NettleNo ratings yet
- Chapter - 4 - Process and Process ManagementDocument14 pagesChapter - 4 - Process and Process ManagementNabaa 'Abdallah Salim Al SanidiaNo ratings yet
- Introduction of Process ManagementDocument18 pagesIntroduction of Process Managementnanekaraditya06No ratings yet
- Processes: Lenmar T. Catajay, CoeDocument62 pagesProcesses: Lenmar T. Catajay, Coebraynat kobeNo ratings yet
- Process ManagementDocument25 pagesProcess ManagementLinda BrownNo ratings yet
- OS Unit-2-NotesDocument50 pagesOS Unit-2-NotesSai someoneNo ratings yet
- R22 Unit - II Final Material OSDocument171 pagesR22 Unit - II Final Material OSprasannabharath24No ratings yet
- Ch. 4 ... Part - 1Document52 pagesCh. 4 ... Part - 1VNo ratings yet
- Os Process ManagementDocument25 pagesOs Process ManagementVishal Yadav Xll CNo ratings yet
- Process ManagementDocument78 pagesProcess ManagementRakesh PatilNo ratings yet
- Os 1Document31 pagesOs 1Sarang UdgaveNo ratings yet
- Unit 2 Material - 1Document20 pagesUnit 2 Material - 1meghal prajapatiNo ratings yet
- OS Chapter 3Document15 pagesOS Chapter 3root18No ratings yet
- 659892241-OS Unit-1Document19 pages659892241-OS Unit-1krishna naniNo ratings yet
- Introduction To Operating SystemDocument86 pagesIntroduction To Operating SystemKunal SinalkarNo ratings yet
- Os Unit-2 IPCDocument33 pagesOs Unit-2 IPCmudduswamyNo ratings yet
- Process Management: By: Modaser SadatDocument10 pagesProcess Management: By: Modaser SadatModaser SadatNo ratings yet
- Processes: 3.1 Process ConceptDocument24 pagesProcesses: 3.1 Process ConceptexcitekarthikNo ratings yet
- Operating System NotesDocument68 pagesOperating System NotesPratyush GoelNo ratings yet
- Unit 2-Process MnagementDocument18 pagesUnit 2-Process MnagementHabtie TesfahunNo ratings yet
- Introduction To Process: Courtesy: Text Book: OS Principles by SilberschatzDocument111 pagesIntroduction To Process: Courtesy: Text Book: OS Principles by SilberschatzGaurav SharmaNo ratings yet
- 04 Process Process MGT - 3Document34 pages04 Process Process MGT - 3Jacob AbrahamNo ratings yet
- Ch. 2 ... Part - 1Document31 pagesCh. 2 ... Part - 1VNo ratings yet
- CHP 2 Process ManagementDocument30 pagesCHP 2 Process ManagementAditiNo ratings yet
- Chapter 2&3Document21 pagesChapter 2&3Minte JoNo ratings yet
- Lecture 3 OSDocument33 pagesLecture 3 OSaidanakarib3No ratings yet
- Process and ThreadsDocument11 pagesProcess and ThreadsLouie Gene SanquiNo ratings yet
- Os Unit 2 Part3Document7 pagesOs Unit 2 Part3aprashant0012No ratings yet
- Chapter-2 Process ManagementDocument56 pagesChapter-2 Process ManagementbellaNo ratings yet
- Os Operating SystemDocument8 pagesOs Operating SystemanithaNo ratings yet
- CH 3 (Processes)Document12 pagesCH 3 (Processes)Muhammad ImranNo ratings yet
- Unit 2 Process ManagementDocument30 pagesUnit 2 Process ManagementTapan RanaNo ratings yet
- ProcessDocument19 pagesProcessshraddha wadnerkarNo ratings yet
- Lecture 2 - ProcessesDocument55 pagesLecture 2 - Processesfiraol.buloNo ratings yet
- UNIT - 3 - Process ConceptsDocument30 pagesUNIT - 3 - Process ConceptsAyush ShresthaNo ratings yet
- Unit IIDocument19 pagesUnit IIadityapawar1865No ratings yet
- Unit 5Document45 pagesUnit 5Abhinav JaiswalNo ratings yet
- Unit 2 - Process ManagementDocument118 pagesUnit 2 - Process ManagementARVIND HNo ratings yet
- Process Scheduling in OSDocument37 pagesProcess Scheduling in OSCherryNo ratings yet
- Process ManagementDocument21 pagesProcess ManagementJin ZeionNo ratings yet
- Process and CPU Scheduling: Part - IIDocument53 pagesProcess and CPU Scheduling: Part - IIAnantharaj ManojNo ratings yet
- Dragon Book Chapter 3 Til 3.3Document11 pagesDragon Book Chapter 3 Til 3.3wexilo1963No ratings yet
- OS Lecture 2Document14 pagesOS Lecture 2Mstafa MhamadNo ratings yet
- Unit - 2Document76 pagesUnit - 2Vamsi KrishnaNo ratings yet
- OS Unit-2Document51 pagesOS Unit-2ANGATI VIJAY KUMAR VU21CSEN0101048No ratings yet
- OS2Document35 pagesOS2nasir jaanNo ratings yet
- Unit 2 - Os - PPT (1)Document121 pagesUnit 2 - Os - PPT (1)naga venkatesh kolapalliNo ratings yet
- CSE-3221 Lecture-02 Ch#03 ProcessDocument16 pagesCSE-3221 Lecture-02 Ch#03 ProcessM A RobNo ratings yet
- CsTutorialpoint - Operating System-Unit2-Complete PDFDocument63 pagesCsTutorialpoint - Operating System-Unit2-Complete PDFGunjan VijayVargiya100% (1)
- Processes Management 3.1 Processes: Chapter ThreeDocument21 pagesProcesses Management 3.1 Processes: Chapter ThreejamacNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be AskedFrom EverandOperating Systems Interview Questions You'll Most Likely Be AskedNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedNo ratings yet
- Chapter 1 Introduction PDFDocument77 pagesChapter 1 Introduction PDFDeepBhaleraoNo ratings yet
- ReleaseNote FileList of GL553VD WIN10 64 V3.00Document2 pagesReleaseNote FileList of GL553VD WIN10 64 V3.00DeepBhaleraoNo ratings yet
- Reason PDFDocument1 pageReason PDFDeepBhaleraoNo ratings yet
- Video PDFDocument2 pagesVideo PDFDeepBhaleraoNo ratings yet
- Reason This Is Justfor DownloadingDocument1 pageReason This Is Justfor DownloadingDeepBhaleraoNo ratings yet
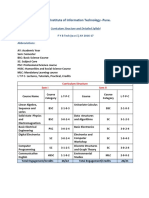
- IIITP - FYBTech - Curriculum - Structure& Syllabus PDFDocument29 pagesIIITP - FYBTech - Curriculum - Structure& Syllabus PDFDeepBhaleraoNo ratings yet
- Chapter 5: Process Synchronization: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument60 pagesChapter 5: Process Synchronization: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionTufail MuhammadNo ratings yet
- Race ConditionDocument14 pagesRace ConditionBharath MeduriNo ratings yet
- CS604 - Finalterm Solved Mcqs Solved With ReferencesDocument49 pagesCS604 - Finalterm Solved Mcqs Solved With ReferencesCreate HopesNo ratings yet
- Week 5 - 6 Concurrecy - Processes Synchronization and DeadlocksDocument22 pagesWeek 5 - 6 Concurrecy - Processes Synchronization and DeadlocksArnold NarvacanNo ratings yet
- Process SynchronizationDocument48 pagesProcess SynchronizationCrime HubNo ratings yet
- OS Notes Module 3 4Document49 pagesOS Notes Module 3 4Huzaifa AnjumNo ratings yet
- Os Lab QuestionsDocument7 pagesOs Lab QuestionsShruti PattajoshiNo ratings yet
- Topic: Ipc Reader-Writer ProblemDocument11 pagesTopic: Ipc Reader-Writer ProblemPooja PawarNo ratings yet
- Chapter 6 Problems and AnswersDocument2 pagesChapter 6 Problems and AnswersSalil BansalNo ratings yet
- Semaphores and MonitorsDocument42 pagesSemaphores and MonitorsUtsav RajNo ratings yet
- Os Assignment-1Document15 pagesOs Assignment-1A. Paavan DileepNo ratings yet
- CS604 - Finalterm Solved Mcqs Solved With ReferencesDocument49 pagesCS604 - Finalterm Solved Mcqs Solved With Referenceschi50% (2)
- Process SynchronizationDocument49 pagesProcess SynchronizationTejaas MageshNo ratings yet
- Module 6: Process SynchronizationDocument50 pagesModule 6: Process SynchronizationPrashad NagarajanNo ratings yet
- Osc Unit 3Document79 pagesOsc Unit 3SRHNo ratings yet
- 1 Process SynchronizationDocument35 pages1 Process SynchronizationArchana PanwarNo ratings yet
- Reader-Writer: Wikipedia Page On The SubjectDocument5 pagesReader-Writer: Wikipedia Page On The SubjectInfinite LoopNo ratings yet
- OS Unit-3 Process Synchronization & DeadlockDocument38 pagesOS Unit-3 Process Synchronization & DeadlockClashWithShadow -COC&More100% (1)
- Chapter 6: Process SynchronizationDocument63 pagesChapter 6: Process Synchronizationنبيل بديرNo ratings yet
- Unit-Iii: Silberschatz and Galvin 1999 6.1Document89 pagesUnit-Iii: Silberschatz and Galvin 1999 6.1akttripathiNo ratings yet
- CMPT 300: Operating Systems I CH 6: Process SynchronizationDocument48 pagesCMPT 300: Operating Systems I CH 6: Process SynchronizationAnzar ImamNo ratings yet
- Os Unit 2Document60 pagesOs Unit 2Anish Dubey SultanpurNo ratings yet
- CS604 Quiz-3 by Vu Topper RMDocument19 pagesCS604 Quiz-3 by Vu Topper RMumarfarooqkhan6873No ratings yet
- IPU OS Unit 2 NotesDocument123 pagesIPU OS Unit 2 NotesMikasa AckermanNo ratings yet
- OS Chapter One and Two Sample Questions - 2Document31 pagesOS Chapter One and Two Sample Questions - 2Yaikob KebedeNo ratings yet
- 1,2,3,4Document74 pages1,2,3,4abcNo ratings yet
- Operating System MCA BPUT Unit-4Document22 pagesOperating System MCA BPUT Unit-4danger boyNo ratings yet
- CS604 Final Term Solved MCQS With References by AwaisDocument48 pagesCS604 Final Term Solved MCQS With References by AwaisMuhammad Awais100% (2)
- CSt206-OS-module 3 - Part1Document14 pagesCSt206-OS-module 3 - Part1Faris BashaNo ratings yet
- Background Critical-Section Problem Semaphores Classical Problems of Synchronization MonitorsDocument32 pagesBackground Critical-Section Problem Semaphores Classical Problems of Synchronization MonitorsjrahulroyNo ratings yet