Download as pptx, pdf, or txt
You might also like
- CES Wrong Answer Summary-4Document2 pagesCES Wrong Answer Summary-4avishek mishra100% (1)
- Johnny Lam Report 238Document5 pagesJohnny Lam Report 238Lê Tuấn MinhNo ratings yet
- Position Control of 4DOF Manipulator ArmDocument7 pagesPosition Control of 4DOF Manipulator Armajay007dNo ratings yet
- Physics ProjectDocument17 pagesPhysics ProjectNarender Singh82% (131)
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- Lecture 2 MechanicsDocument11 pagesLecture 2 MechanicsM. Sharjeel FarzadNo ratings yet
- Magnetic Torquer Attitude Control Via Asymptotic Periodic LQRDocument13 pagesMagnetic Torquer Attitude Control Via Asymptotic Periodic LQRKanu GovilaNo ratings yet
- Vibration Control For Active Magnetic Bearing High-Speed Flywheel Rotor System With Modal Separation and Velocity Estimation StrategyDocument19 pagesVibration Control For Active Magnetic Bearing High-Speed Flywheel Rotor System With Modal Separation and Velocity Estimation StrategyRizqa RuvianaNo ratings yet
- Report of Mechanics of Machines 1Document12 pagesReport of Mechanics of Machines 1muhammaduzairNo ratings yet
- Robust LQR Controller Design For Stabilizing and Trajectory Tracking of Inverted Pendulum PDFDocument10 pagesRobust LQR Controller Design For Stabilizing and Trajectory Tracking of Inverted Pendulum PDFS JNo ratings yet
- Linkage AnalysisDocument42 pagesLinkage Analysiskefiyalew agegnNo ratings yet
- Kinematics Modeling of Redundant ManipulatorDocument7 pagesKinematics Modeling of Redundant ManipulatorHung Nguyen-CongNo ratings yet
- Design of Linear Quadratic Regulator For Rotary Inverted Pendulum Using LabviewDocument5 pagesDesign of Linear Quadratic Regulator For Rotary Inverted Pendulum Using LabviewnestorGNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- Unit 2 2nd PartDocument23 pagesUnit 2 2nd Partrajaganesh.c.i.dNo ratings yet
- Inverted PendulumDocument18 pagesInverted PendulumLingxi HuangNo ratings yet
- Modeling and Control of A Rotary Inverted PendulumDocument6 pagesModeling and Control of A Rotary Inverted PendulumsalmanNo ratings yet
- Seliga - Stabilization Fuzzy Control of Inverted Pendulum SystemsDocument11 pagesSeliga - Stabilization Fuzzy Control of Inverted Pendulum SystemsRober't RedNo ratings yet
- New KinematicsDocument18 pagesNew KinematicsA Fo AnkitNo ratings yet
- Kinematics For Continuum Robot of The EndoscopeDocument5 pagesKinematics For Continuum Robot of The Endoscopeffb.boy.30No ratings yet
- The Inverted Pendulum Benchmark in Nonlinear Control Theory - A Survey PDFDocument9 pagesThe Inverted Pendulum Benchmark in Nonlinear Control Theory - A Survey PDFLuis Felipe Antunes R.No ratings yet
- Turning Motion Control Design of A Two-Wheeled Inverted Pendulum Using Curvature Tracking and Optimal Control TheoryDocument19 pagesTurning Motion Control Design of A Two-Wheeled Inverted Pendulum Using Curvature Tracking and Optimal Control Theorystd xiaoliangNo ratings yet
- Design of A Simple and Robust Control System For A Single-Link Flexible Robot ArmDocument6 pagesDesign of A Simple and Robust Control System For A Single-Link Flexible Robot ArmDilek METİNNo ratings yet
- Modeling and Controller Designing of Rotary Inverted Pendulum (RIP) - Comparison by Using Various Design MethodsDocument8 pagesModeling and Controller Designing of Rotary Inverted Pendulum (RIP) - Comparison by Using Various Design Methodskyaw phone htetNo ratings yet
- Group-2: LOPES Exoskeleton Robot: Design and Evaluation: Mentor: Prof. Chelva Kumar Prof. Vineeth VashisthaDocument16 pagesGroup-2: LOPES Exoskeleton Robot: Design and Evaluation: Mentor: Prof. Chelva Kumar Prof. Vineeth VashisthaDevendraMeenaNo ratings yet
- Modeling and Adaptive Control of An Omni-Mecanum-Wheeled RobotDocument14 pagesModeling and Adaptive Control of An Omni-Mecanum-Wheeled RobotTelmoNo ratings yet
- Rotary Inverted PendulumDocument8 pagesRotary Inverted PendulumEduardo BittencourtNo ratings yet
- HMT Hassan Ali AwanDocument3 pagesHMT Hassan Ali AwanHadiqa KiyaniNo ratings yet
- Inverse Optimal Design For Position Control of A QuadrotorDocument24 pagesInverse Optimal Design For Position Control of A QuadrotorMohadese RezaeiNo ratings yet
- Control of Inverted PendulumDocument5 pagesControl of Inverted PendulumAhmed HwaidiNo ratings yet
- An Introduction To Robotic ManipulatorsDocument29 pagesAn Introduction To Robotic ManipulatorsAyush_Rai_2506No ratings yet
- Monolithic Parallel Linear Compliant Mechanism For Two Axes Ultraprecision Linear MotionDocument8 pagesMonolithic Parallel Linear Compliant Mechanism For Two Axes Ultraprecision Linear Motionmaulikshah_23No ratings yet
- Robust Real-Time Control of A Two-Rotor Aerodynamic SystemDocument6 pagesRobust Real-Time Control of A Two-Rotor Aerodynamic SystemsaeedNo ratings yet
- Tracking Control of An Inverted Pendulum Using Computed Feedback Linearization TechniqueDocument6 pagesTracking Control of An Inverted Pendulum Using Computed Feedback Linearization TechniqueAkmalNo ratings yet
- Control and Estimation For Cooperative Manipulator Tasks: 1 MotivationDocument19 pagesControl and Estimation For Cooperative Manipulator Tasks: 1 MotivationHelmi Ab MajidNo ratings yet
- Ijrcs: Multibody Modeling and Balance Control of A Reaction Wheel Inverted Pendulum Using LQR ControllerDocument6 pagesIjrcs: Multibody Modeling and Balance Control of A Reaction Wheel Inverted Pendulum Using LQR ControllerEsmfNo ratings yet
- Abstract. The Balancing of An Inverted Pendulum byDocument5 pagesAbstract. The Balancing of An Inverted Pendulum byFariz AhdiatamaNo ratings yet
- Composite Robust Control of A Laboratory Flexible ManipulatorDocument6 pagesComposite Robust Control of A Laboratory Flexible ManipulatorinfodotzNo ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- Motion and Manipulation: RoboticsDocument20 pagesMotion and Manipulation: RoboticsAijaz AhmedNo ratings yet
- Optimal Control of Inverted Pendulum Using Fuzzy Logic, PID & LQR ControllerDocument8 pagesOptimal Control of Inverted Pendulum Using Fuzzy Logic, PID & LQR Controllershekhar yadavNo ratings yet
- Swing-Up and Stabilization Control Design For An Underactuated Rotary Inverted Pendulum System Theory and ExperimentsDocument10 pagesSwing-Up and Stabilization Control Design For An Underactuated Rotary Inverted Pendulum System Theory and ExperimentsLÊ ĐẠI HIỆPNo ratings yet
- Laboratory Manual MEC229: Theory of Machines LaboratoryDocument51 pagesLaboratory Manual MEC229: Theory of Machines Laboratoryhemanth singhNo ratings yet
- Abbasnejad 2016Document18 pagesAbbasnejad 2016Yash MittalNo ratings yet
- Avionics: Unit II: Inertial Navigation System Deepak Gaur Assistant Professor MvjceDocument43 pagesAvionics: Unit II: Inertial Navigation System Deepak Gaur Assistant Professor MvjceNagaraja BhagavNo ratings yet
- Group 6 GyroscopeDocument17 pagesGroup 6 GyroscopePhenias ManyashaNo ratings yet
- Design and Analysis of A Compliant Parallel Pan-Tilt Platform 2015Document12 pagesDesign and Analysis of A Compliant Parallel Pan-Tilt Platform 2015newkid2202No ratings yet
- Introduction To Concepts in RoboticsDocument26 pagesIntroduction To Concepts in RoboticsزهديابوانسNo ratings yet
- Linear Control SystemDocument865 pagesLinear Control SystemTAภaу ЎALLaмᎥlliNo ratings yet
- Case Study Scara RobotDocument8 pagesCase Study Scara RobotEyad Al-MohatwaryNo ratings yet
- ProceedingsDocument7 pagesProceedingsEsmfNo ratings yet
- Joints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFDocument33 pagesJoints Types: Revolute Joint 1DOF Prismatic Joint Joint 1DOFf0245652No ratings yet
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- PhysRevLett 110 010504Document5 pagesPhysRevLett 110 010504campal123No ratings yet
- Chapter 6 - Manipulator DynamicsDocument26 pagesChapter 6 - Manipulator Dynamicstestmail916No ratings yet
- Quantum Computing: The Future of Information Processing: The Science CollectionFrom EverandQuantum Computing: The Future of Information Processing: The Science CollectionNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Taming Heterogeneity and Complexity of Embedded ControlFrom EverandTaming Heterogeneity and Complexity of Embedded ControlFrançoise Lamnabhi-LagarriguNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Digital-Multimeter Catalog From Fluke BangladeshDocument6 pagesDigital-Multimeter Catalog From Fluke BangladeshFluke BangladeshNo ratings yet
- Locating Faults AG en US1Document3 pagesLocating Faults AG en US1Neelakandan MasilamaniNo ratings yet
- Classical Soil MechanicsDocument20 pagesClassical Soil MechanicsAgustira Rahman IlhamiNo ratings yet
- Gravity DamsDocument38 pagesGravity DamsNaved ShahNo ratings yet
- Ensayos de Jar Test IDocument116 pagesEnsayos de Jar Test IEzequiel BrandanNo ratings yet
- Insulation Coordination and Overvoltage ProtectionDocument5 pagesInsulation Coordination and Overvoltage ProtectionSuresh Babu DNo ratings yet
- Information and Communications Technology Stage3 ExamDocument3 pagesInformation and Communications Technology Stage3 ExammndzevarNo ratings yet
- In 2 PhysicsDocument495 pagesIn 2 PhysicsDrago667890% (10)
- Rubber Properties in Compression: Standard Test Methods ForDocument4 pagesRubber Properties in Compression: Standard Test Methods Forjaime cadenaNo ratings yet
- Kinematic Analysis of Plane MechanismsDocument12 pagesKinematic Analysis of Plane MechanismsEdison PilcoNo ratings yet
- Ftre-2017-18-C-Viii - Paper-2 - PCM PDFDocument14 pagesFtre-2017-18-C-Viii - Paper-2 - PCM PDFPKNo ratings yet
- Design Inset-Fed Microstrip Patch Antennas PDFDocument8 pagesDesign Inset-Fed Microstrip Patch Antennas PDFsorinproiecteNo ratings yet
- 2009 CE Physics Marking SchemeDocument8 pages2009 CE Physics Marking SchemeChoi FungNo ratings yet
- Setting Krot MDocument1 pageSetting Krot MniggeruNo ratings yet
- Ebook Engineering Fundamentals An Introduction To Engineering Si Edition PDF Full Chapter PDFDocument67 pagesEbook Engineering Fundamentals An Introduction To Engineering Si Edition PDF Full Chapter PDFmichael.dye870100% (36)
- Aerodynamics AshishDocument10 pagesAerodynamics AshishaerorockNo ratings yet
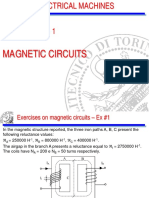
- Exercises On ELECTRICAL MACHINESDocument29 pagesExercises On ELECTRICAL MACHINESDavide100% (1)
- TCVN Water PipeDocument43 pagesTCVN Water PipeTuan DangNo ratings yet
- Vdocuments - MX - Catalogo Maquinas Despiezables de Feedback PDFDocument4 pagesVdocuments - MX - Catalogo Maquinas Despiezables de Feedback PDFHelder NascimentoNo ratings yet
- CompLab6 Magnetic EffectsDocument3 pagesCompLab6 Magnetic EffectsChristina ValeriaNo ratings yet
- Dunne, T. Formation and Controls of Channel NetworksDocument29 pagesDunne, T. Formation and Controls of Channel NetworksJorge MarquesNo ratings yet
- Austen Lamacraft - Long Wavelength Spin Dynamics of Ferromagnetic CondensatesDocument32 pagesAusten Lamacraft - Long Wavelength Spin Dynamics of Ferromagnetic CondensatesPomac232No ratings yet
- Chapter 2 Carrier Transport PhenomenaDocument56 pagesChapter 2 Carrier Transport PhenomenaMamapaiya HaariNo ratings yet
- Physics A Level DefinitionsDocument12 pagesPhysics A Level DefinitionsNaillah Saba100% (1)
- Measurement of Earth Resistance and ResistivityDocument9 pagesMeasurement of Earth Resistance and ResistivityIsuru Kasthurirathne100% (4)
- ELEC201 Practice L02Document25 pagesELEC201 Practice L02MilNo ratings yet
- 9702 s18 QP 13 PDFDocument20 pages9702 s18 QP 13 PDFAkshay BundhooNo ratings yet
- Power Transformers PDFDocument64 pagesPower Transformers PDFDESIGNMENNo ratings yet