Download as ppt, pdf, or txt
You might also like
- Shop Manual Engine 12V 140e PDFDocument601 pagesShop Manual Engine 12V 140e PDFHarry Wart Wart100% (3)
- Static Sequential XIDocument30 pagesStatic Sequential XISHOBHIT SHARMANo ratings yet
- Sequential StaticDocument20 pagesSequential Staticvivek singhNo ratings yet
- Static Sequential CircuitsDocument23 pagesStatic Sequential CircuitsAnubhav SinghNo ratings yet
- VLSI Design I VLSI Design I VLSI Design I VLSI Design IDocument23 pagesVLSI Design I VLSI Design I VLSI Design I VLSI Design ISaksham sangwanNo ratings yet
- Latch Versus Register: Latch Stores Data When Clock Is LowDocument23 pagesLatch Versus Register: Latch Stores Data When Clock Is LowSrikrishna JanaNo ratings yet
- Clocking StrategiesDocument21 pagesClocking Strategiesswapnikasharma100% (1)
- Timing DiagramDocument23 pagesTiming DiagramAnmol Gupta100% (1)
- Latch Versus RegisterDocument23 pagesLatch Versus RegisterSGSNo ratings yet
- ECE 545-Digital System Design With VHDL: Digital Logic Refresher Part B - Sequential Logic Building BlocksDocument20 pagesECE 545-Digital System Design With VHDL: Digital Logic Refresher Part B - Sequential Logic Building BlocksAli Mohamed EltemsahNo ratings yet
- Dynamic Seq XIIDocument20 pagesDynamic Seq XIISHOBHIT SHARMANo ratings yet
- 6004 Spring 1998: L10: Clocking and The Dynamic DisciplineDocument8 pages6004 Spring 1998: L10: Clocking and The Dynamic Disciplinemohammed zubairNo ratings yet
- Unit 3 VLSIDocument93 pagesUnit 3 VLSIPraba KaranNo ratings yet
- Latch Versus RegisterDocument23 pagesLatch Versus Registerfly2beyondgmail.comNo ratings yet
- EE 459/500 - HDL Based Digital Design With Programmable Logic Timing and Clock IssuesDocument23 pagesEE 459/500 - HDL Based Digital Design With Programmable Logic Timing and Clock Issuessneha96669No ratings yet
- EECS 150 - Components and Design Techniques For Digital SystemsDocument41 pagesEECS 150 - Components and Design Techniques For Digital Systemsrifqi sutrisnoNo ratings yet
- Advanced VLSI Design: Timing IssuesDocument88 pagesAdvanced VLSI Design: Timing IssuesSudhanshu BadolaNo ratings yet
- Digital Integrated CircuitsDocument10 pagesDigital Integrated CircuitsshahanisubhashNo ratings yet
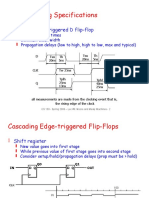
- Typical Timing Specifications: Positive Edge-Triggered D Flip-FlopDocument50 pagesTypical Timing Specifications: Positive Edge-Triggered D Flip-Flopanusha killariNo ratings yet
- Unit 6 Introduction To Sequential LogicDocument34 pagesUnit 6 Introduction To Sequential LogicTech Talk With MR. SNo ratings yet
- FlipFlops Chapter 5Document27 pagesFlipFlops Chapter 5jenny khanNo ratings yet
- 7 & 8. Sequential CircuitsDocument24 pages7 & 8. Sequential CircuitsDr. Sanjeev PuniaNo ratings yet
- Module 4 - Seq Circuits 1Document55 pagesModule 4 - Seq Circuits 1Nithish KannaaNo ratings yet
- FlipflopDocument20 pagesFlipflopSam BradshawNo ratings yet
- L-6. Tristates & LatchesDocument12 pagesL-6. Tristates & Latchesjery tomNo ratings yet
- Esc201: Introducton To Electronics: Sequental CircuitsDocument34 pagesEsc201: Introducton To Electronics: Sequental CircuitssomeshNo ratings yet
- Flipflops Latches 1Document20 pagesFlipflops Latches 1Varsha S LalapuraNo ratings yet
- Flip-Flops & Latches: Digital ElectronicsDocument20 pagesFlip-Flops & Latches: Digital ElectronicsPriyadharsini VNo ratings yet
- Digital IC Design MUXESDocument40 pagesDigital IC Design MUXESPraful KabadiNo ratings yet
- Flip-Flops: Revision of Lecture Notes Written by Dr. Timothy DrysdaleDocument35 pagesFlip-Flops: Revision of Lecture Notes Written by Dr. Timothy DrysdaleKaustav MitraNo ratings yet
- Lecture 11Document34 pagesLecture 11ajayNo ratings yet
- Sample and Hold Circuits P (Chapter 8)Document24 pagesSample and Hold Circuits P (Chapter 8)Anonymous JTOnHEqGVNo ratings yet
- Chapter3-Sequential Circuits PDFDocument10 pagesChapter3-Sequential Circuits PDFAshu1803No ratings yet
- Sequential Circuits: Digital ElectronicsDocument10 pagesSequential Circuits: Digital ElectronicsAshu1803No ratings yet
- Computer Architecture I: Digital DesignDocument39 pagesComputer Architecture I: Digital DesignAli BalochNo ratings yet
- Metastability/Overview: - Metastability of Flip-Flops (FFS) and LatchesDocument19 pagesMetastability/Overview: - Metastability of Flip-Flops (FFS) and LatchesMani KiranNo ratings yet
- L5: Simple Sequential Circuits and VerilogDocument25 pagesL5: Simple Sequential Circuits and VerilogKaleb FikreNo ratings yet
- Unit 3Document46 pagesUnit 3PushpalathaNo ratings yet
- 3 SequentialDocument25 pages3 SequentialABHI LIFENo ratings yet
- L25 - Datapath Design - p1Document46 pagesL25 - Datapath Design - p1Shanawar AliNo ratings yet
- Time Borring and Clock SkewDocument18 pagesTime Borring and Clock SkewNitin Suyan PanchalNo ratings yet
- Lecture 8 - Sequantial Logic Circuits - 2014Document32 pagesLecture 8 - Sequantial Logic Circuits - 2014DineshNo ratings yet
- Metastability and Clock Domain Crossing: IN3160 IN4160Document30 pagesMetastability and Clock Domain Crossing: IN3160 IN4160kumarNo ratings yet
- EEE 102, Chapter 7 - Part 1Document8 pagesEEE 102, Chapter 7 - Part 1DenizNo ratings yet
- Flip FlopsDocument12 pagesFlip FlopsMuskan Bhakhar CNo ratings yet
- Lectures#14-15 - Sequential CircuitsDocument39 pagesLectures#14-15 - Sequential Circuitssamu123djghoshNo ratings yet
- T8-Sequential Electronic SystemsDocument38 pagesT8-Sequential Electronic SystemsRosiris RendónNo ratings yet
- Designing Sequential Logic Circuits: Department of Electrical and Electronics EngineeringDocument24 pagesDesigning Sequential Logic Circuits: Department of Electrical and Electronics Engineeringshanu kumarNo ratings yet
- Unit 4 SLO1-6Document36 pagesUnit 4 SLO1-6shashwatNo ratings yet
- Latches N FFsDocument24 pagesLatches N FFsAmoga LekshmiNo ratings yet
- FlipFlops 5Document5 pagesFlipFlops 5Al-Amin BhuiyanNo ratings yet
- A Tutorial: Transient Domain Flip-Flop Models For Mixed-Mode SimulationDocument28 pagesA Tutorial: Transient Domain Flip-Flop Models For Mixed-Mode SimulationVinitKharkarNo ratings yet
- Topic 2 - Subtopic 2.3Document31 pagesTopic 2 - Subtopic 2.3Navinaash Chanthra SegaranNo ratings yet
- Lecture 7Document27 pagesLecture 7Emmad AhmedNo ratings yet
- Flip Flops and Application: Japan Malaysia Technical Institute (Jmti) TKEDocument34 pagesFlip Flops and Application: Japan Malaysia Technical Institute (Jmti) TKEFadly ShafiqNo ratings yet
- Synchronous Sequential Ckts by Lakshmi NarayanaDocument30 pagesSynchronous Sequential Ckts by Lakshmi NarayanaMurali Krishna100% (1)
- FlipFlops 6Document5 pagesFlipFlops 6Al-Amin BhuiyanNo ratings yet
- Archl FSM 04Document52 pagesArchl FSM 04Ajax KrausNo ratings yet
- Example 2.12: "Ideal" Ohmic Contact "Ideal" Ohmic Contact Opt "Ideal" Ohmic Contact "Ideal" Ohmic Contact OptDocument2 pagesExample 2.12: "Ideal" Ohmic Contact "Ideal" Ohmic Contact Opt "Ideal" Ohmic Contact "Ideal" Ohmic Contact OptfneojwgfjeNo ratings yet
- 10 5 - 1 LN 0259 - 0 LN: N N N VDocument18 pages10 5 - 1 LN 0259 - 0 LN: N N N VfneojwgfjeNo ratings yet
- Power 6.2Document21 pagesPower 6.2fneojwgfjeNo ratings yet
- Sensors: Design and Characterization of A Three-Axis Hall Effect-Based Soft Skin SensorDocument11 pagesSensors: Design and Characterization of A Three-Axis Hall Effect-Based Soft Skin SensorfneojwgfjeNo ratings yet
- DHI-EHS-HSM-010 - ELECTRICITY AND ELECTRICAL APPLIANCE - Rev0Document12 pagesDHI-EHS-HSM-010 - ELECTRICITY AND ELECTRICAL APPLIANCE - Rev0yenquyen.08cmtNo ratings yet
- ICEEDM2016-Final (31juli2016) Yudha Lesmana FIniteDocument35 pagesICEEDM2016-Final (31juli2016) Yudha Lesmana FIniteMangisi Haryanto ParapatNo ratings yet
- Title: Solo's Coders-Page: Amiga Advanced Graphics Architecture (AGA) DocumentationDocument32 pagesTitle: Solo's Coders-Page: Amiga Advanced Graphics Architecture (AGA) DocumentationddaaggNo ratings yet
- Chapter 4, Requirements ElicitationDocument40 pagesChapter 4, Requirements ElicitationtinishdharanNo ratings yet
- LTE Autoclaves MediclaveDocument5 pagesLTE Autoclaves MediclaveA'yunil HisbiyahNo ratings yet
- Steel Grades Material and Chemical Composition InformationDocument2 pagesSteel Grades Material and Chemical Composition InformationMitesh PhalakNo ratings yet
- program For EISCH //name - Jatin Chand Deopa //ID - 51944Document7 pagesprogram For EISCH //name - Jatin Chand Deopa //ID - 51944Jatin ChandNo ratings yet
- Machine Foundation Digital Assignment 2: (1) Types of Machines, Capacity, Operating FrequencyDocument40 pagesMachine Foundation Digital Assignment 2: (1) Types of Machines, Capacity, Operating Frequencyyedida v r aviswanadh100% (2)
- Mix Design M60 PDFDocument3 pagesMix Design M60 PDFGreeshma KajolNo ratings yet
- Wetstock Reconciliation at Fuel Storage Facilities PDFDocument44 pagesWetstock Reconciliation at Fuel Storage Facilities PDFPeter SsempebwaNo ratings yet
- CS6311 - PDS - 2 Lab Manual by RajasekaranDocument95 pagesCS6311 - PDS - 2 Lab Manual by RajasekaranarunasekaranNo ratings yet
- NT-133 Engl (sp1435)Document6 pagesNT-133 Engl (sp1435)AlanNo ratings yet
- SQL Server 2008 Replication Technical Case StudyDocument44 pagesSQL Server 2008 Replication Technical Case StudyVidya SagarNo ratings yet
- Design Solution 2016Document6 pagesDesign Solution 2016Harold Mario AninagNo ratings yet
- PLC Ladder Logic Example of AlarmsDocument8 pagesPLC Ladder Logic Example of AlarmsInstrumentation ToolsNo ratings yet
- PDF Kuliah Tamu UnejDocument34 pagesPDF Kuliah Tamu UnejReza MarinandaNo ratings yet
- Excel Shortcut KEYSDocument15 pagesExcel Shortcut KEYSSharjeel IjazNo ratings yet
- RSF Electronik MS82 CatalogDocument4 pagesRSF Electronik MS82 CatalogElectromateNo ratings yet
- Automotive Informatics and Communicative Systems PDFDocument364 pagesAutomotive Informatics and Communicative Systems PDFGuillermo RivaNo ratings yet
- Humble Homemade Hifi - Mezzo ProteusDocument4 pagesHumble Homemade Hifi - Mezzo ProteusCyril GoutaillerNo ratings yet
- Archmodels Vol 122Document14 pagesArchmodels Vol 122gombestralalaNo ratings yet
- Fobos Gas Schematics enDocument15 pagesFobos Gas Schematics enzozo0424No ratings yet
- Newsletter November December 2016 PDFDocument28 pagesNewsletter November December 2016 PDFremix_ctaNo ratings yet
- Unit 6 Steam CondenserDocument7 pagesUnit 6 Steam CondenserSamrat KumarNo ratings yet
- 3rd Quarter Summative TestDocument2 pages3rd Quarter Summative Testmaricel_ayingNo ratings yet
- CSP 520N 1BDocument18 pagesCSP 520N 1BfredtornayNo ratings yet
- Agrolux 4.80e Workshop ManualDocument438 pagesAgrolux 4.80e Workshop ManualMinn Thet Naing100% (1)
- ISSUE Tracking DocumentDocument64 pagesISSUE Tracking DocumentAishwarya SairamNo ratings yet