
Lecture 1
Lecture 1
You might also like
- Experiment About Air-Conditioning UnitDocument32 pagesExperiment About Air-Conditioning UnitVerlon Vincent100% (2)
- Group 1 Experimental and MeasurementDocument46 pagesGroup 1 Experimental and MeasurementAmir O. OshoNo ratings yet
- Nilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsDocument11 pagesNilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsGohil HardikNo ratings yet
- MAIN TOPIC - Non-Electrical Quantities in InstrumentationDocument90 pagesMAIN TOPIC - Non-Electrical Quantities in InstrumentationArctic FoxNo ratings yet
- Delivered By:: Rahat SarwarDocument33 pagesDelivered By:: Rahat SarwarinamNo ratings yet
- Temperature and Heat (Chapter 17 of University Physics)Document15 pagesTemperature and Heat (Chapter 17 of University Physics)LesterNo ratings yet
- Chapter 6 Temperature MeasurementDocument37 pagesChapter 6 Temperature MeasurementYasser ElshaerNo ratings yet
- Chapter 4Document35 pagesChapter 4Nithindev GuttikondaNo ratings yet
- TransducerDocument56 pagesTransducerArvin AldoverNo ratings yet
- Heat and TemperatureDocument25 pagesHeat and Temperaturekoromamoses235No ratings yet
- Temp, Flow BtechDocument66 pagesTemp, Flow BtechRishika SharmaNo ratings yet
- TemperatureDocument43 pagesTemperaturesakshipowar144No ratings yet
- Temperature TransducersDocument42 pagesTemperature TransducersAjinkya DeshmukhNo ratings yet
- Chapter Two Sensors and Application: Dept. of Electrical and Computer Eng. Addis Ababa by Biruk TDocument40 pagesChapter Two Sensors and Application: Dept. of Electrical and Computer Eng. Addis Ababa by Biruk TabenuNo ratings yet
- Daniel Training Course: PT & TTDocument36 pagesDaniel Training Course: PT & TTberry MikeNo ratings yet
- Pidc Unit 1-1Document88 pagesPidc Unit 1-1Gauri DetheNo ratings yet
- Measuring InstrumentDocument47 pagesMeasuring InstrumentNeelesh SahuNo ratings yet
- Temperature Measurements: Presented byDocument32 pagesTemperature Measurements: Presented byAhmed AliNo ratings yet
- TempcalDocument55 pagesTempcalsulochana kNo ratings yet
- Sensors Working 05-04-2021Document38 pagesSensors Working 05-04-2021Kishore CivilNo ratings yet
- Advanced/Modern Industrial Electronics Project 20: INPUT DevicesDocument41 pagesAdvanced/Modern Industrial Electronics Project 20: INPUT DevicesAini Syakimah ShuyutiNo ratings yet
- Temperature SensorsDocument10 pagesTemperature Sensorsdevashish.jo11No ratings yet
- Week 3 Reporting - ABRINA, ADONA, BERNABE PDFDocument47 pagesWeek 3 Reporting - ABRINA, ADONA, BERNABE PDFVenrick CamposNo ratings yet
- Mechatronics CHAPTER 4Document52 pagesMechatronics CHAPTER 4NahomNo ratings yet
- Instrumentation and Measurements: Engr. Muhammad Usman Sardar Lecturer, EEDocument29 pagesInstrumentation and Measurements: Engr. Muhammad Usman Sardar Lecturer, EEMuhammad HarisNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioningعلي الساعديNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioninghaker linkisNo ratings yet
- Temperature Measurement: Group 1Document101 pagesTemperature Measurement: Group 1Anonymous udJfQxX1rNo ratings yet
- Temperature MeasurementDocument66 pagesTemperature MeasurementEng RemoonNo ratings yet
- Temperature Measurement Presentation FinDocument49 pagesTemperature Measurement Presentation Fintarikayehu amanuelNo ratings yet
- AP Physics CH 10&11 Day 1Document21 pagesAP Physics CH 10&11 Day 1pxyooj_1No ratings yet
- Chapter Two Part 1Document38 pagesChapter Two Part 1marNo ratings yet
- Department of Mechanical EngineeringDocument15 pagesDepartment of Mechanical EngineeringDharmendra BelwanshiNo ratings yet
- Experiment-15 Aim: - Study and Use Various Temperature Sensing Elements. Apparatus UsedDocument4 pagesExperiment-15 Aim: - Study and Use Various Temperature Sensing Elements. Apparatus UsedHem DaveNo ratings yet
- Temperature-Measurements-01 IIT RoorkeeDocument47 pagesTemperature-Measurements-01 IIT RoorkeeBHAVESH JAINNo ratings yet
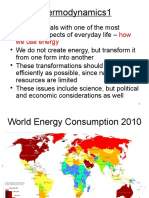
- Thermodynamics1: How We Use EnergyDocument21 pagesThermodynamics1: How We Use Energyhamza A.laftaNo ratings yet
- Temperature MeasurementDocument39 pagesTemperature MeasurementJonathan Da CostaNo ratings yet
- Temperature Sensors and Photo SensorsDocument17 pagesTemperature Sensors and Photo SensorsAditya GuptaNo ratings yet
- Temperature MeasurementDocument26 pagesTemperature MeasurementaqhammamNo ratings yet
- Wollo University Kombolcha Institute of Technology Chemical Engineering DepartmentDocument39 pagesWollo University Kombolcha Institute of Technology Chemical Engineering Departmentየነበር ነበር በነበርNo ratings yet
- Temperature MeasurementDocument44 pagesTemperature MeasurementJuan de la CruzNo ratings yet
- Temperature MeasurementDocument35 pagesTemperature MeasurementNikunj YagnikNo ratings yet
- Thermometers Igcse Physics: Prof.S. PalumboDocument44 pagesThermometers Igcse Physics: Prof.S. PalumboRaffaele Sag.No ratings yet
- Temp 1Document36 pagesTemp 1Lilian MumoNo ratings yet
- Module 4 Sesion 1 Temperature and Displacement SensorsDocument39 pagesModule 4 Sesion 1 Temperature and Displacement SensorsManav Jain100% (3)
- Thermal PhysicsDocument29 pagesThermal PhysicsAnonymous rn5Te9MwkNo ratings yet
- Chapter 9: Measurement of TemperatureDocument28 pagesChapter 9: Measurement of TemperatureBa BuNo ratings yet
- IoT Unit-IDocument144 pagesIoT Unit-IADITYA SACHIN NEVENo ratings yet
- Control & Measuring InstrumentsDocument50 pagesControl & Measuring InstrumentscmcNo ratings yet
- Basic of Instrumentation EyassDocument34 pagesBasic of Instrumentation EyassLu'ay ElyaeNo ratings yet
- Temperature Sensors Types, How It Works, & ApplicationsDocument23 pagesTemperature Sensors Types, How It Works, & ApplicationsEncardio RiteNo ratings yet
- BEEE-Unit VI TransducerDocument71 pagesBEEE-Unit VI TransducerAisha JainNo ratings yet
- Lec 4 - CH 01Document14 pagesLec 4 - CH 01Ali HassanNo ratings yet
- Unit 14 TemperatureDocument40 pagesUnit 14 TemperatureMasliyana Abdul GhaniNo ratings yet
- Chapter Two: Sensors and ApplicationsDocument58 pagesChapter Two: Sensors and ApplicationsDebebe YirgaNo ratings yet
- Measurement of TemperatureDocument22 pagesMeasurement of TemperatureAsheque IqbalNo ratings yet
- Unit 2 - ASVDocument5 pagesUnit 2 - ASVAnup S. Vibhute DITNo ratings yet
- Thermocouple, RTD AND Temperature Switch: Trainer: Waheed Jillani (I.E-Ii)Document48 pagesThermocouple, RTD AND Temperature Switch: Trainer: Waheed Jillani (I.E-Ii)muddasirmasoodNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- 2016 q6Document1 page2016 q6abdullah 3mar abou reashaNo ratings yet
- Value EngineeringDocument7 pagesValue Engineeringabdullah 3mar abou reashaNo ratings yet
- Revision Questions 2222Document13 pagesRevision Questions 2222abdullah 3mar abou reashaNo ratings yet
- CH 3Document14 pagesCH 3abdullah 3mar abou reashaNo ratings yet
- Advanced Automatic ControlDocument26 pagesAdvanced Automatic Controlabdullah 3mar abou reashaNo ratings yet
- مسألة ٣Document7 pagesمسألة ٣abdullah 3mar abou reashaNo ratings yet
- LEC3 Lubrication 2021Document19 pagesLEC3 Lubrication 2021abdullah 3mar abou reashaNo ratings yet
- مسألة ٤Document5 pagesمسألة ٤abdullah 3mar abou reashaNo ratings yet
- Lecture 002 - PLCDocument6 pagesLecture 002 - PLCabdullah 3mar abou reashaNo ratings yet
- Final 2017Document3 pagesFinal 2017abdullah 3mar abou reashaNo ratings yet
- نسخة من Final - ExamDocument2 pagesنسخة من Final - Examabdullah 3mar abou reashaNo ratings yet
- Statistics: Chapter 1: Statistics, Data and Statistical ThinkingDocument24 pagesStatistics: Chapter 1: Statistics, Data and Statistical Thinkingabdullah 3mar abou reashaNo ratings yet
- Karnaugh MapsDocument10 pagesKarnaugh Mapsabdullah 3mar abou reashaNo ratings yet
- Sheet 2 MRPDocument5 pagesSheet 2 MRPabdullah 3mar abou reashaNo ratings yet
- حل الميد تيرم cncDocument2 pagesحل الميد تيرم cncabdullah 3mar abou reashaNo ratings yet
- Sheet 3 Operation ScheduleDocument1 pageSheet 3 Operation Scheduleabdullah 3mar abou reashaNo ratings yet
- A Review On Fabrication & Characterization of Hybrid Aluminium Metal Matrix CompositeDocument6 pagesA Review On Fabrication & Characterization of Hybrid Aluminium Metal Matrix Compositeabdullah 3mar abou reashaNo ratings yet
- Dry Sliding Wear Behavior of Al2O3/Sic Particle Reinforced Aluminium Based Mmcs Fabricated by Stir Casting MethodDocument10 pagesDry Sliding Wear Behavior of Al2O3/Sic Particle Reinforced Aluminium Based Mmcs Fabricated by Stir Casting Methodabdullah 3mar abou reashaNo ratings yet
- CNC QuestionsDocument1 pageCNC Questionsabdullah 3mar abou reashaNo ratings yet
- First Page PDFDocument1 pageFirst Page PDFabdullah 3mar abou reashaNo ratings yet
- Assignments Machine Tool DesignDocument7 pagesAssignments Machine Tool Designabdullah 3mar abou reashaNo ratings yet
- Sliding Wear Properties of A Composite of Aluminum 2024 Powder Reinforced With Heat Treatment and Silicon CarbideDocument12 pagesSliding Wear Properties of A Composite of Aluminum 2024 Powder Reinforced With Heat Treatment and Silicon Carbideabdullah 3mar abou reashaNo ratings yet
- محاضرة العداداتDocument3 pagesمحاضرة العداداتabdullah 3mar abou reashaNo ratings yet
- Lecture 004 - PLCDocument2 pagesLecture 004 - PLCabdullah 3mar abou reashaNo ratings yet
- Invoice 1109Document1 pageInvoice 1109abdullah 3mar abou reashaNo ratings yet
- Chapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle SupportsDocument16 pagesChapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle Supportsabdullah 3mar abou reashaNo ratings yet
- Tribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy CompositesDocument6 pagesTribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy Compositesabdullah 3mar abou reashaNo ratings yet
- Chapter 7 - Lathes - Metal Arts PressDocument8 pagesChapter 7 - Lathes - Metal Arts Pressabdullah 3mar abou reashaNo ratings yet
- Tribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy CompositesDocument6 pagesTribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy Compositesabdullah 3mar abou reashaNo ratings yet
- Graduation Project Guide (GPG) : September 2015Document25 pagesGraduation Project Guide (GPG) : September 2015abdullah 3mar abou reashaNo ratings yet
- GNC LabelDocument1 pageGNC LabeljhierryNo ratings yet
- PhysRevB 108 014412Document11 pagesPhysRevB 108 014412mdmukadamNo ratings yet
- Unity Hydroprocessing CatalystsDocument12 pagesUnity Hydroprocessing CatalystsKannanGKNo ratings yet
- 19XR Manual MX3 PDFDocument210 pages19XR Manual MX3 PDFJoel Avena100% (1)
- PENETRON Data SheetDocument2 pagesPENETRON Data SheetbhagwatpatilNo ratings yet
- V-Sem DTDMDocument27 pagesV-Sem DTDMVishwas vNo ratings yet
- Isabr 2008Document169 pagesIsabr 2008Cláudia KiyaNo ratings yet
- Compactheat ExchangersDocument124 pagesCompactheat Exchangersarun aryaNo ratings yet
- Crack Initiation in Nodular Cast IronDocument1 pageCrack Initiation in Nodular Cast IronmohamadabdallaNo ratings yet
- Fe2O3 Spindles Decorated AuDocument10 pagesFe2O3 Spindles Decorated Auvishal panditNo ratings yet
- Isolation and Characterization of Piperine From The Fruits of Black Pepper (Piper Nigrum)Document6 pagesIsolation and Characterization of Piperine From The Fruits of Black Pepper (Piper Nigrum)Rodelaide SianturiNo ratings yet
- Current Progress On Rechargeable Magnesium-Air Battery: Chun-Sheng Li, Yan Sun, Florian Gebert, and Shu-Lei ChouDocument11 pagesCurrent Progress On Rechargeable Magnesium-Air Battery: Chun-Sheng Li, Yan Sun, Florian Gebert, and Shu-Lei ChouTai Xin YeeNo ratings yet
- Main PartDocument75 pagesMain Partkabir_ce06038No ratings yet
- Types of Rocks: Learning Activity Sheet in Earth and Life Sciences No. 4Document13 pagesTypes of Rocks: Learning Activity Sheet in Earth and Life Sciences No. 4Lopez AeraNo ratings yet
- O'Brien, Malvankar - 2016 - A Simple and Low-Cost Procedure For Growing Geobacter Sulfurreducens Cell Cultures and Biofilms in Bioelectr-1Document27 pagesO'Brien, Malvankar - 2016 - A Simple and Low-Cost Procedure For Growing Geobacter Sulfurreducens Cell Cultures and Biofilms in Bioelectr-1katarroskyNo ratings yet
- Benzoyl PeroxideDocument4 pagesBenzoyl PeroxideSara HamadaNo ratings yet
- Mini Jet EngineDocument3 pagesMini Jet EngineGOWRRAJU ANILNo ratings yet
- Understanding The General Chemistry of The Planted Aquarium: Gregory Morin, PH.DDocument9 pagesUnderstanding The General Chemistry of The Planted Aquarium: Gregory Morin, PH.DAlexandre W. SlowikNo ratings yet
- Msds-016 Conbextra GP - Sds11813 - enDocument5 pagesMsds-016 Conbextra GP - Sds11813 - enjoker batmanNo ratings yet
- Nuevas TecnológicasDocument7 pagesNuevas TecnológicasamparoNo ratings yet
- Kumpulan Contoh Soal SBMPTN Bahasa Inggris Dan Pembahasannya 2016Document16 pagesKumpulan Contoh Soal SBMPTN Bahasa Inggris Dan Pembahasannya 2016Fahmi Daud Abdillah100% (1)
- Material Safety Data Sheet Mixed Xylene: 1. Product and Company IdentificationDocument7 pagesMaterial Safety Data Sheet Mixed Xylene: 1. Product and Company IdentificationsahilchemNo ratings yet
- Food Science and Applied Biotechnology: Research ArticleDocument8 pagesFood Science and Applied Biotechnology: Research Articlepandiya rajanNo ratings yet
- Nitrogen Gas Generator: Nitrosource N2-20P - N2-80PDocument32 pagesNitrogen Gas Generator: Nitrosource N2-20P - N2-80PTaha OpedNo ratings yet
- Defects and Quality Optimisation of Core-Spun Yarn Containing SpandexDocument9 pagesDefects and Quality Optimisation of Core-Spun Yarn Containing SpandexMohammed Atiqul Hoque Chowdhury100% (1)
- GDC CatalogDocument112 pagesGDC Cataloganon_105203924No ratings yet
- The Determination of A Solubility Product ConstantDocument6 pagesThe Determination of A Solubility Product Constantapi-551058017No ratings yet
- MeCaTeC MeCaCorr 710 Surface Polymer Ceramic CoatingDocument1 pageMeCaTeC MeCaCorr 710 Surface Polymer Ceramic CoatingjaviermvsNo ratings yet
- Company MergersDocument9 pagesCompany MergersShriram JaiswalNo ratings yet


















































































































Download as pptx, pdf, or txt
You might also like
- Experiment About Air-Conditioning UnitDocument32 pagesExperiment About Air-Conditioning UnitVerlon Vincent100% (2)
- Group 1 Experimental and MeasurementDocument46 pagesGroup 1 Experimental and MeasurementAmir O. OshoNo ratings yet
- Nilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsDocument11 pagesNilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsGohil HardikNo ratings yet
- MAIN TOPIC - Non-Electrical Quantities in InstrumentationDocument90 pagesMAIN TOPIC - Non-Electrical Quantities in InstrumentationArctic FoxNo ratings yet
- Delivered By:: Rahat SarwarDocument33 pagesDelivered By:: Rahat SarwarinamNo ratings yet
- Temperature and Heat (Chapter 17 of University Physics)Document15 pagesTemperature and Heat (Chapter 17 of University Physics)LesterNo ratings yet
- Chapter 6 Temperature MeasurementDocument37 pagesChapter 6 Temperature MeasurementYasser ElshaerNo ratings yet
- Chapter 4Document35 pagesChapter 4Nithindev GuttikondaNo ratings yet
- TransducerDocument56 pagesTransducerArvin AldoverNo ratings yet
- Heat and TemperatureDocument25 pagesHeat and Temperaturekoromamoses235No ratings yet
- Temp, Flow BtechDocument66 pagesTemp, Flow BtechRishika SharmaNo ratings yet
- TemperatureDocument43 pagesTemperaturesakshipowar144No ratings yet
- Temperature TransducersDocument42 pagesTemperature TransducersAjinkya DeshmukhNo ratings yet
- Chapter Two Sensors and Application: Dept. of Electrical and Computer Eng. Addis Ababa by Biruk TDocument40 pagesChapter Two Sensors and Application: Dept. of Electrical and Computer Eng. Addis Ababa by Biruk TabenuNo ratings yet
- Daniel Training Course: PT & TTDocument36 pagesDaniel Training Course: PT & TTberry MikeNo ratings yet
- Pidc Unit 1-1Document88 pagesPidc Unit 1-1Gauri DetheNo ratings yet
- Measuring InstrumentDocument47 pagesMeasuring InstrumentNeelesh SahuNo ratings yet
- Temperature Measurements: Presented byDocument32 pagesTemperature Measurements: Presented byAhmed AliNo ratings yet
- TempcalDocument55 pagesTempcalsulochana kNo ratings yet
- Sensors Working 05-04-2021Document38 pagesSensors Working 05-04-2021Kishore CivilNo ratings yet
- Advanced/Modern Industrial Electronics Project 20: INPUT DevicesDocument41 pagesAdvanced/Modern Industrial Electronics Project 20: INPUT DevicesAini Syakimah ShuyutiNo ratings yet
- Temperature SensorsDocument10 pagesTemperature Sensorsdevashish.jo11No ratings yet
- Week 3 Reporting - ABRINA, ADONA, BERNABE PDFDocument47 pagesWeek 3 Reporting - ABRINA, ADONA, BERNABE PDFVenrick CamposNo ratings yet
- Mechatronics CHAPTER 4Document52 pagesMechatronics CHAPTER 4NahomNo ratings yet
- Instrumentation and Measurements: Engr. Muhammad Usman Sardar Lecturer, EEDocument29 pagesInstrumentation and Measurements: Engr. Muhammad Usman Sardar Lecturer, EEMuhammad HarisNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioningعلي الساعديNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioninghaker linkisNo ratings yet
- Temperature Measurement: Group 1Document101 pagesTemperature Measurement: Group 1Anonymous udJfQxX1rNo ratings yet
- Temperature MeasurementDocument66 pagesTemperature MeasurementEng RemoonNo ratings yet
- Temperature Measurement Presentation FinDocument49 pagesTemperature Measurement Presentation Fintarikayehu amanuelNo ratings yet
- AP Physics CH 10&11 Day 1Document21 pagesAP Physics CH 10&11 Day 1pxyooj_1No ratings yet
- Chapter Two Part 1Document38 pagesChapter Two Part 1marNo ratings yet
- Department of Mechanical EngineeringDocument15 pagesDepartment of Mechanical EngineeringDharmendra BelwanshiNo ratings yet
- Experiment-15 Aim: - Study and Use Various Temperature Sensing Elements. Apparatus UsedDocument4 pagesExperiment-15 Aim: - Study and Use Various Temperature Sensing Elements. Apparatus UsedHem DaveNo ratings yet
- Temperature-Measurements-01 IIT RoorkeeDocument47 pagesTemperature-Measurements-01 IIT RoorkeeBHAVESH JAINNo ratings yet
- Thermodynamics1: How We Use EnergyDocument21 pagesThermodynamics1: How We Use Energyhamza A.laftaNo ratings yet
- Temperature MeasurementDocument39 pagesTemperature MeasurementJonathan Da CostaNo ratings yet
- Temperature Sensors and Photo SensorsDocument17 pagesTemperature Sensors and Photo SensorsAditya GuptaNo ratings yet
- Temperature MeasurementDocument26 pagesTemperature MeasurementaqhammamNo ratings yet
- Wollo University Kombolcha Institute of Technology Chemical Engineering DepartmentDocument39 pagesWollo University Kombolcha Institute of Technology Chemical Engineering Departmentየነበር ነበር በነበርNo ratings yet
- Temperature MeasurementDocument44 pagesTemperature MeasurementJuan de la CruzNo ratings yet
- Temperature MeasurementDocument35 pagesTemperature MeasurementNikunj YagnikNo ratings yet
- Thermometers Igcse Physics: Prof.S. PalumboDocument44 pagesThermometers Igcse Physics: Prof.S. PalumboRaffaele Sag.No ratings yet
- Temp 1Document36 pagesTemp 1Lilian MumoNo ratings yet
- Module 4 Sesion 1 Temperature and Displacement SensorsDocument39 pagesModule 4 Sesion 1 Temperature and Displacement SensorsManav Jain100% (3)
- Thermal PhysicsDocument29 pagesThermal PhysicsAnonymous rn5Te9MwkNo ratings yet
- Chapter 9: Measurement of TemperatureDocument28 pagesChapter 9: Measurement of TemperatureBa BuNo ratings yet
- IoT Unit-IDocument144 pagesIoT Unit-IADITYA SACHIN NEVENo ratings yet
- Control & Measuring InstrumentsDocument50 pagesControl & Measuring InstrumentscmcNo ratings yet
- Basic of Instrumentation EyassDocument34 pagesBasic of Instrumentation EyassLu'ay ElyaeNo ratings yet
- Temperature Sensors Types, How It Works, & ApplicationsDocument23 pagesTemperature Sensors Types, How It Works, & ApplicationsEncardio RiteNo ratings yet
- BEEE-Unit VI TransducerDocument71 pagesBEEE-Unit VI TransducerAisha JainNo ratings yet
- Lec 4 - CH 01Document14 pagesLec 4 - CH 01Ali HassanNo ratings yet
- Unit 14 TemperatureDocument40 pagesUnit 14 TemperatureMasliyana Abdul GhaniNo ratings yet
- Chapter Two: Sensors and ApplicationsDocument58 pagesChapter Two: Sensors and ApplicationsDebebe YirgaNo ratings yet
- Measurement of TemperatureDocument22 pagesMeasurement of TemperatureAsheque IqbalNo ratings yet
- Unit 2 - ASVDocument5 pagesUnit 2 - ASVAnup S. Vibhute DITNo ratings yet
- Thermocouple, RTD AND Temperature Switch: Trainer: Waheed Jillani (I.E-Ii)Document48 pagesThermocouple, RTD AND Temperature Switch: Trainer: Waheed Jillani (I.E-Ii)muddasirmasoodNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- 2016 q6Document1 page2016 q6abdullah 3mar abou reashaNo ratings yet
- Value EngineeringDocument7 pagesValue Engineeringabdullah 3mar abou reashaNo ratings yet
- Revision Questions 2222Document13 pagesRevision Questions 2222abdullah 3mar abou reashaNo ratings yet
- CH 3Document14 pagesCH 3abdullah 3mar abou reashaNo ratings yet
- Advanced Automatic ControlDocument26 pagesAdvanced Automatic Controlabdullah 3mar abou reashaNo ratings yet
- مسألة ٣Document7 pagesمسألة ٣abdullah 3mar abou reashaNo ratings yet
- LEC3 Lubrication 2021Document19 pagesLEC3 Lubrication 2021abdullah 3mar abou reashaNo ratings yet
- مسألة ٤Document5 pagesمسألة ٤abdullah 3mar abou reashaNo ratings yet
- Lecture 002 - PLCDocument6 pagesLecture 002 - PLCabdullah 3mar abou reashaNo ratings yet
- Final 2017Document3 pagesFinal 2017abdullah 3mar abou reashaNo ratings yet
- نسخة من Final - ExamDocument2 pagesنسخة من Final - Examabdullah 3mar abou reashaNo ratings yet
- Statistics: Chapter 1: Statistics, Data and Statistical ThinkingDocument24 pagesStatistics: Chapter 1: Statistics, Data and Statistical Thinkingabdullah 3mar abou reashaNo ratings yet
- Karnaugh MapsDocument10 pagesKarnaugh Mapsabdullah 3mar abou reashaNo ratings yet
- Sheet 2 MRPDocument5 pagesSheet 2 MRPabdullah 3mar abou reashaNo ratings yet
- حل الميد تيرم cncDocument2 pagesحل الميد تيرم cncabdullah 3mar abou reashaNo ratings yet
- Sheet 3 Operation ScheduleDocument1 pageSheet 3 Operation Scheduleabdullah 3mar abou reashaNo ratings yet
- A Review On Fabrication & Characterization of Hybrid Aluminium Metal Matrix CompositeDocument6 pagesA Review On Fabrication & Characterization of Hybrid Aluminium Metal Matrix Compositeabdullah 3mar abou reashaNo ratings yet
- Dry Sliding Wear Behavior of Al2O3/Sic Particle Reinforced Aluminium Based Mmcs Fabricated by Stir Casting MethodDocument10 pagesDry Sliding Wear Behavior of Al2O3/Sic Particle Reinforced Aluminium Based Mmcs Fabricated by Stir Casting Methodabdullah 3mar abou reashaNo ratings yet
- CNC QuestionsDocument1 pageCNC Questionsabdullah 3mar abou reashaNo ratings yet
- First Page PDFDocument1 pageFirst Page PDFabdullah 3mar abou reashaNo ratings yet
- Assignments Machine Tool DesignDocument7 pagesAssignments Machine Tool Designabdullah 3mar abou reashaNo ratings yet
- Sliding Wear Properties of A Composite of Aluminum 2024 Powder Reinforced With Heat Treatment and Silicon CarbideDocument12 pagesSliding Wear Properties of A Composite of Aluminum 2024 Powder Reinforced With Heat Treatment and Silicon Carbideabdullah 3mar abou reashaNo ratings yet
- محاضرة العداداتDocument3 pagesمحاضرة العداداتabdullah 3mar abou reashaNo ratings yet
- Lecture 004 - PLCDocument2 pagesLecture 004 - PLCabdullah 3mar abou reashaNo ratings yet
- Invoice 1109Document1 pageInvoice 1109abdullah 3mar abou reashaNo ratings yet
- Chapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle SupportsDocument16 pagesChapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle Supportsabdullah 3mar abou reashaNo ratings yet
- Tribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy CompositesDocument6 pagesTribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy Compositesabdullah 3mar abou reashaNo ratings yet
- Chapter 7 - Lathes - Metal Arts PressDocument8 pagesChapter 7 - Lathes - Metal Arts Pressabdullah 3mar abou reashaNo ratings yet
- Tribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy CompositesDocument6 pagesTribological Performance of Carbon Nanotubes-Alumina Hybrid/epoxy Compositesabdullah 3mar abou reashaNo ratings yet
- Graduation Project Guide (GPG) : September 2015Document25 pagesGraduation Project Guide (GPG) : September 2015abdullah 3mar abou reashaNo ratings yet
- GNC LabelDocument1 pageGNC LabeljhierryNo ratings yet
- PhysRevB 108 014412Document11 pagesPhysRevB 108 014412mdmukadamNo ratings yet
- Unity Hydroprocessing CatalystsDocument12 pagesUnity Hydroprocessing CatalystsKannanGKNo ratings yet
- 19XR Manual MX3 PDFDocument210 pages19XR Manual MX3 PDFJoel Avena100% (1)
- PENETRON Data SheetDocument2 pagesPENETRON Data SheetbhagwatpatilNo ratings yet
- V-Sem DTDMDocument27 pagesV-Sem DTDMVishwas vNo ratings yet
- Isabr 2008Document169 pagesIsabr 2008Cláudia KiyaNo ratings yet
- Compactheat ExchangersDocument124 pagesCompactheat Exchangersarun aryaNo ratings yet
- Crack Initiation in Nodular Cast IronDocument1 pageCrack Initiation in Nodular Cast IronmohamadabdallaNo ratings yet
- Fe2O3 Spindles Decorated AuDocument10 pagesFe2O3 Spindles Decorated Auvishal panditNo ratings yet
- Isolation and Characterization of Piperine From The Fruits of Black Pepper (Piper Nigrum)Document6 pagesIsolation and Characterization of Piperine From The Fruits of Black Pepper (Piper Nigrum)Rodelaide SianturiNo ratings yet
- Current Progress On Rechargeable Magnesium-Air Battery: Chun-Sheng Li, Yan Sun, Florian Gebert, and Shu-Lei ChouDocument11 pagesCurrent Progress On Rechargeable Magnesium-Air Battery: Chun-Sheng Li, Yan Sun, Florian Gebert, and Shu-Lei ChouTai Xin YeeNo ratings yet
- Main PartDocument75 pagesMain Partkabir_ce06038No ratings yet
- Types of Rocks: Learning Activity Sheet in Earth and Life Sciences No. 4Document13 pagesTypes of Rocks: Learning Activity Sheet in Earth and Life Sciences No. 4Lopez AeraNo ratings yet
- O'Brien, Malvankar - 2016 - A Simple and Low-Cost Procedure For Growing Geobacter Sulfurreducens Cell Cultures and Biofilms in Bioelectr-1Document27 pagesO'Brien, Malvankar - 2016 - A Simple and Low-Cost Procedure For Growing Geobacter Sulfurreducens Cell Cultures and Biofilms in Bioelectr-1katarroskyNo ratings yet
- Benzoyl PeroxideDocument4 pagesBenzoyl PeroxideSara HamadaNo ratings yet
- Mini Jet EngineDocument3 pagesMini Jet EngineGOWRRAJU ANILNo ratings yet
- Understanding The General Chemistry of The Planted Aquarium: Gregory Morin, PH.DDocument9 pagesUnderstanding The General Chemistry of The Planted Aquarium: Gregory Morin, PH.DAlexandre W. SlowikNo ratings yet
- Msds-016 Conbextra GP - Sds11813 - enDocument5 pagesMsds-016 Conbextra GP - Sds11813 - enjoker batmanNo ratings yet
- Nuevas TecnológicasDocument7 pagesNuevas TecnológicasamparoNo ratings yet
- Kumpulan Contoh Soal SBMPTN Bahasa Inggris Dan Pembahasannya 2016Document16 pagesKumpulan Contoh Soal SBMPTN Bahasa Inggris Dan Pembahasannya 2016Fahmi Daud Abdillah100% (1)
- Material Safety Data Sheet Mixed Xylene: 1. Product and Company IdentificationDocument7 pagesMaterial Safety Data Sheet Mixed Xylene: 1. Product and Company IdentificationsahilchemNo ratings yet
- Food Science and Applied Biotechnology: Research ArticleDocument8 pagesFood Science and Applied Biotechnology: Research Articlepandiya rajanNo ratings yet
- Nitrogen Gas Generator: Nitrosource N2-20P - N2-80PDocument32 pagesNitrogen Gas Generator: Nitrosource N2-20P - N2-80PTaha OpedNo ratings yet
- Defects and Quality Optimisation of Core-Spun Yarn Containing SpandexDocument9 pagesDefects and Quality Optimisation of Core-Spun Yarn Containing SpandexMohammed Atiqul Hoque Chowdhury100% (1)
- GDC CatalogDocument112 pagesGDC Cataloganon_105203924No ratings yet
- The Determination of A Solubility Product ConstantDocument6 pagesThe Determination of A Solubility Product Constantapi-551058017No ratings yet
- MeCaTeC MeCaCorr 710 Surface Polymer Ceramic CoatingDocument1 pageMeCaTeC MeCaCorr 710 Surface Polymer Ceramic CoatingjaviermvsNo ratings yet
- Company MergersDocument9 pagesCompany MergersShriram JaiswalNo ratings yet