Download as ppt, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Life and Ministry of Apostle PeterDocument113 pagesThe Life and Ministry of Apostle PeterDukejack100% (1)
- Tesla Coil ReportDocument15 pagesTesla Coil ReportPiyush Raj50% (2)
- Undangan 17th Biannual OgrindoDocument1 pageUndangan 17th Biannual Ogrindobillal_m_aslamNo ratings yet
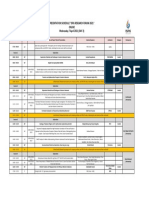
- ISPG RF 2021 Technical Schedule - DAY 2 SharedDocument1 pageISPG RF 2021 Technical Schedule - DAY 2 Sharedbillal_m_aslamNo ratings yet
- Reservoir Solutions Vol 24 No 2Document8 pagesReservoir Solutions Vol 24 No 2billal_m_aslamNo ratings yet
- IPA18 80 G Manusrcipt Ver1Document13 pagesIPA18 80 G Manusrcipt Ver1billal_m_aslamNo ratings yet
- PVT Modeling TutorialDocument7 pagesPVT Modeling Tutorialbillal_m_aslamNo ratings yet
- Temperature Pressure Gas Viscosity Z Factor Gas FVF (Deg F) (Psi) (Centipoise) (ft3/scf)Document4 pagesTemperature Pressure Gas Viscosity Z Factor Gas FVF (Deg F) (Psi) (Centipoise) (ft3/scf)billal_m_aslamNo ratings yet
- TPM433 TPDP Kuliah Minggu-2 ITB-UNPATTIDocument31 pagesTPM433 TPDP Kuliah Minggu-2 ITB-UNPATTIbillal_m_aslamNo ratings yet
- Gas Well Testing & Saphir Training Course by TotalDocument26 pagesGas Well Testing & Saphir Training Course by Totalbillal_m_aslamNo ratings yet
- Chapter 1 - Intro To Differential Equations and SolutionsDocument21 pagesChapter 1 - Intro To Differential Equations and Solutionsbillal_m_aslamNo ratings yet
- 1 ITB Complete 2011 PDFDocument392 pages1 ITB Complete 2011 PDFbillal_m_aslamNo ratings yet
- 1 ITB Complete 2011 PDFDocument392 pages1 ITB Complete 2011 PDFbillal_m_aslamNo ratings yet
- Usulan Pengadaan Buku TM 2019Document10 pagesUsulan Pengadaan Buku TM 2019billal_m_aslamNo ratings yet
- Features: CCM PFC ControllerDocument35 pagesFeatures: CCM PFC ControllerLAN JR HOUSENo ratings yet
- Pyschological First AidDocument26 pagesPyschological First AidVhenn Francis SaysonNo ratings yet
- BWISEgrc ConsultantimtDocument4 pagesBWISEgrc ConsultantimtazzuNo ratings yet
- Infinite Series - Cauchy's Root TestDocument7 pagesInfinite Series - Cauchy's Root TestSanjay GuptaNo ratings yet
- M1 Quiz 2Document10 pagesM1 Quiz 2Tiến Thành Nguyễn100% (1)
- Collibra Prescriptive Path v2Document4 pagesCollibra Prescriptive Path v2AhamedSharifNo ratings yet
- Zhuangzi's "Treatise On Making Things Equal"Document13 pagesZhuangzi's "Treatise On Making Things Equal"salvadorNo ratings yet
- Short History of InfinityDocument8 pagesShort History of InfinityErnesto MoraNo ratings yet
- CHANGELOG MDDocument8 pagesCHANGELOG MDsansydansyvansyNo ratings yet
- Marjorie T. Garcia Bsa 2D Compilation of Activites in Ethics Lesson 1: Aristotle 'S Virtue Theory ActivityDocument21 pagesMarjorie T. Garcia Bsa 2D Compilation of Activites in Ethics Lesson 1: Aristotle 'S Virtue Theory ActivityRochelleNo ratings yet
- Principles and Theories of Language Acquisition and LearningDocument78 pagesPrinciples and Theories of Language Acquisition and LearningPrincess AlmarioNo ratings yet
- 2016 Current ResumeDocument2 pages2016 Current Resumeapi-338765578No ratings yet
- Origin and Evolution of Influenza Virus Hemagglutinin Genes: Yoshiyuki Suzuki and Masatoshi NeiDocument9 pagesOrigin and Evolution of Influenza Virus Hemagglutinin Genes: Yoshiyuki Suzuki and Masatoshi Neialeisha97No ratings yet
- Introduction of Guest SpeakerDocument2 pagesIntroduction of Guest SpeakerAldrin Jay BalangatanNo ratings yet
- System Wiring DiagramsDocument87 pagesSystem Wiring Diagramshcastens3989100% (1)
- Apollonius of Rhodes - ArgonauticaDocument438 pagesApollonius of Rhodes - Argonauticajoaquin ojedaNo ratings yet
- Lab Report Fine Aggregate A13 PDFDocument10 pagesLab Report Fine Aggregate A13 PDFNur NabilahNo ratings yet
- BPSC 101 (E) 2023-24Document3 pagesBPSC 101 (E) 2023-24aumatonlineNo ratings yet
- MNP Porting Process Guidelines 280410Document34 pagesMNP Porting Process Guidelines 280410Qais KaisraniNo ratings yet
- Diagnostic Test 2022 23 EnglishDocument14 pagesDiagnostic Test 2022 23 EnglishRona Janoras GonzalesNo ratings yet
- Correction Rabattement Part1 Et Part2 ANGLESDocument2 pagesCorrection Rabattement Part1 Et Part2 ANGLESAyman FaroukiNo ratings yet
- St. Patrick's Day Parade: Program & Line-UpDocument4 pagesSt. Patrick's Day Parade: Program & Line-UpMaple Lake MessengerNo ratings yet
- 1Q03 Lab1 Time CapsuleDocument2 pages1Q03 Lab1 Time Capsule2487601343No ratings yet
- 21 Century Literature From The Philippines and The World: RD STDocument3 pages21 Century Literature From The Philippines and The World: RD STRhaedenNarababYalanibNo ratings yet
- Assessment of The Impact Strength of The Denture Base Resin Polymerized by Various Processing TechniquesDocument7 pagesAssessment of The Impact Strength of The Denture Base Resin Polymerized by Various Processing TechniquesPhoebe DavidNo ratings yet
- Causes and Prevention of Common Diseases Abd Epidemics in Human Epidemics, Pandemics, and OutbreaksDocument4 pagesCauses and Prevention of Common Diseases Abd Epidemics in Human Epidemics, Pandemics, and OutbreaksFaisal AwanNo ratings yet
- LV 679 DatasheetDocument2 pagesLV 679 DatasheetWaleed MareeNo ratings yet
- These Are Notes For MathsDocument3 pagesThese Are Notes For MathsMuhammad MudassirNo ratings yet